道路拓扑生成方法、模型训练方法、装置及车辆与流程
本公开涉及数据处理,尤其涉及人工智能、自动驾驶及智能交通。
背景技术:
1、道路拓扑信息对于自动驾驶车辆的自主导航以及行车规划至关重要。自动驾驶车辆可以从高精地图中获取道路拓扑信息,或者可以利用摄像头拍摄的图像生成在线道路拓扑信息。
技术实现思路
1、本公开提供了一种道路拓扑生成方法、模型训练方法、装置及车辆。
2、根据本公开的第一方面,提供了一种道路拓扑生成方法,包括:
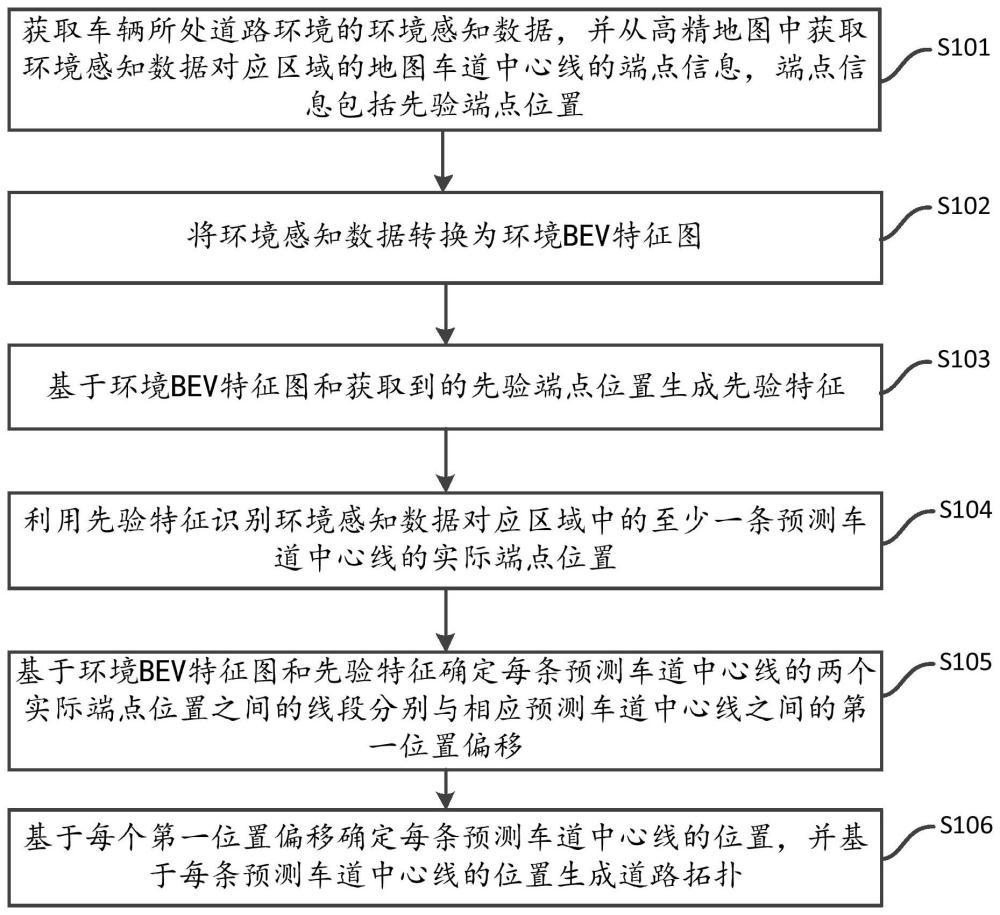
3、获取车辆所处道路环境的环境感知数据,并从高精地图中获取所述环境感知数据对应区域的地图车道中心线的端点信息,所述端点信息包括先验端点位置;
4、将所述环境感知数据转换为环境bev特征图;
5、基于所述环境bev特征图和获取到的先验端点位置生成先验特征;
6、利用所述先验特征识别所述环境感知数据对应区域中的至少一条预测车道中心线的实际端点位置;
7、基于所述环境bev特征图和所述先验特征确定每条所述预测车道中心线的两个实际端点位置之间的线段分别与相应所述预测车道中心线之间的第一位置偏移;
8、基于每个所述第一位置偏移确定每条所述预测车道中心线的位置,并基于每条所述预测车道中心线的位置生成道路拓扑。
9、根据本公开的第二方面,提供了一种模型训练方法,包括:
10、获取样本环境感知数据,并从高精地图中获取所述样本环境感知数据对应区域的样本地图车道中心线的样本端点信息,所述样本端点信息包括样本先验端点位置;
11、将所述样本环境感知数据转换为样本环境bev特征图;
12、将所述样本环境bev特征图转换为关键点特征,并基于所述样本环境bev特征图和获取到的样本先验端点位置生成样本先验特征;
13、利用所述关键点特征识别所述环境感知数据对应区域中的至少一条样本预测车道中心线的第一预测端点位置;
14、利用所述样本先验特征识别所述环境感知数据对应区域中的至少一条样本预测车道中心线的第二预测端点位置;
15、基于所述样本环境bev特征图和所述样本先验特征确定每条所述样本预测车道中心线的两个第二预测端点位置之间的样本线段分别与相应所述样本预测车道中心线之间的第一样本位置偏移;
16、基于每个所述第一样本位置偏移确定每条所述样本预测车道中心线的位置;
17、基于每个所述第一预测端点位置、每个所述第二预测端点位置和每条所述样本预测车道中心线的位置对车道识别模型进行训练。
18、根据本公开的第三方面,提供了一种道路拓扑生成装置,包括:
19、获取模块,用于获取车辆所处道路环境的环境感知数据,并从高精地图中获取所述环境感知数据对应区域的地图车道中心线的端点信息,所述端点信息包括先验端点位置;
20、转换模块,用于将所述环境感知数据转换为环境bev特征图;
21、特征提取模块,用于基于所述环境bev特征图和获取到的先验端点位置生成先验特征;
22、识别模块,用于利用所述先验特征识别所述环境感知数据对应区域中的至少一条预测车道中心线的实际端点位置
23、确定模块,用于基于所述环境bev特征图和所述先验特征确定每条所述预测车道中心线的两个实际端点位置之间的线段分别与相应所述预测车道中心线之间的第一位置偏移;
24、生成模块,用于基于每个所述第一位置偏移确定每条所述预测车道中心线的位置,并基于每条所述预测车道中心线的位置生成道路拓扑。
25、根据本公开的第四方面,提供了一种模型训练装置,包括:
26、获取模块,用于获取样本环境感知数据,并从高精地图中获取所述样本环境感知数据对应区域的样本地图车道中心线的样本端点信息,所述样本端点信息包括样本先验端点位置;
27、转换模块,用于将所述样本环境感知数据转换为样本环境bev特征图;
28、特征提取模块,用于将所述样本环境bev特征图转换为关键点特征,并基于所述样本环境bev特征图和获取到的样本先验端点位置生成样本先验特征;
29、识别模块,用于利用所述关键点特征识别所述环境感知数据对应区域中的至少一条样本预测车道中心线的第一预测端点位置;利用所述样本先验特征识别所述环境感知数据对应区域中的至少一条样本预测车道中心线的第二预测端点位置;
30、确定模块,用于基于所述样本环境bev特征图和所述样本先验特征确定每条所述样本预测车道中心线的两个第二预测端点位置之间的样本线段分别与相应所述样本预测车道中心线之间的第一样本位置偏移;基于每个所述第一样本位置偏移确定每条所述样本预测车道中心线的位置;
31、训练模块,用于基于每个所述第一预测端点位置、每个所述第二预测端点位置和每条所述样本预测车道中心线的位置对车道识别模型进行训练。
32、根据本公开的第五方面,提供了一种电子设备,包括:
33、至少一个处理器;以及
34、与所述至少一个处理器通信连接的存储器;其中,
35、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述第一方面或第二方面所述的方法。
36、根据本公开的第六方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行上述第一方面或第二方面所述的方法。
37、根据本公开的第七方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现上述第一方面或第二方面所述的方法。
38、根据本公开的第八方面,提供了一种自动驾驶车辆,包括车载终端,所述车载终端中部署有根据上述第二方面所述的方法训练得到的车道中心线识别模型,所述车载终端用于实现上述第一方面所述的方法。
39、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种道路拓扑生成方法,包括:
2.根据权利要求1所述的方法,其中,所述端点信息还包括端点之间的先验连接关系,具有先验连接关系的两个端点属于同一预测车道中心线;
3.根据权利要求2所述的方法,其中,所述基于每个所述车道特征,确定每个所述拼接特征对应的两个实际端点位置之间的线段分别与相应所述预测车道中心线之间的第一位置偏移,包括:
4.根据权利要求2所述的方法,在所述将所述环境bev特征图和所述拼接特征进行交叉注意力处理,得到至少一个车道特征之后,所述方法还包括:
5.根据权利要求1所述的方法,其中,所述将所述环境感知数据转换为环境bev特征图,包括:
6.根据权利要求1所述的方法,其中,所述基于所述环境bev特征图和获取到的先验端点位置生成先验特征,包括:
7.一种模型训练方法,包括:
8.根据权利要求7所述的方法,其中,所述样本端点信息还包括样本端点之间的先验连接关系,具有先验连接关系的两个样本端点属于同一样本预测车道中心线;
9.根据权利要求8所述的方法,其中,所述基于每个所述样本车道特征,确定每个所述样本拼接特征对应的两个第二预测端点位置之间的样本线段分别与相应所述样本预测车道中心线之间的第一样本位置偏移,包括:
10.根据权利要求8所述的方法,在所述将所述样本环境bev特征图和每个所述样本拼接特征进行交叉注意力处理,得到至少一个样本车道特征之后,所述方法还包括:
11.根据权利要求10所述的方法,在所述将所述样本环境bev特征图转换为关键点特征,并基于所述样本环境bev特征图和获取到的样本先验端点位置生成样本先验特征之后,所述方法还包括:
12.根据权利要求7所述的方法,其中,所述基于每个所述第一预测端点位置、每个所述第二预测端点位置和每条所述样本预测车道中心线的位置对车道识别模型进行训练,包括:
13.根据权利要求10所述的方法,其中,所述基于每个所述第一预测端点位置、每个所述第二预测端点位置、每条所述样本预测车道中心线的位置、每条所述样本车道线的位置和属性以及所述车道分类,对所述车道识别模型进行训练,包括:
14.根据权利要求11所述的方法,其中,所述基于每个所述第一预测端点位置、每个所述第二预测端点位置、每个所述第一分类结果、每个所述第一连接结果、每个所述第二分类结果、每个所述第二连接结果、每条所述样本预测车道中心线的位置、每条所述样本车道线的位置和属性以及所述车道分类,对所述车道识别模型进行训练,包括:
15.根据权利要求12-14中任一项所述的方法,在所述获取样本环境感知数据之后,所述方法还包括:
16.根据权利要求15所述的方法,其中,所述对获取到的端点位置进行数据清洗,得到标签端点位置,包括:
17.根据权利要求7所述的方法,其中,
18.根据权利要求7所述的方法,其中,所述将所述样本环境感知数据转换为样本环境bev特征图,包括:
19.根据权利要求7所述的方法,其中,所述基于所述样本环境bev特征图和获取到的样本先验端点位置生成样本先验特征,包括:
20.根据权利要求7或18所述的方法,其中,所述将所述样本环境bev特征图转换为关键点特征,包括:
21.一种道路拓扑生成装置,包括:
22.根据权利要求21所述的装置,其中,所述端点信息还包括端点之间的先验连接关系,具有先验连接关系的两个端点属于同一车道中心线;
23.根据权利要求22所述的装置,其中,所述确定模块,具体用于:
24.根据权利要求22所述的装置,
25.根据权利要求21所述的装置,其中,所述转换模块,具体用于:
26.根据权利要求21所述的装置,其中,所述特征提取模块,具体用于:
27.一种模型训练装置,包括:
28.根据权利要求27所述的装置,其中,所述样本端点信息还包括样本端点之间的先验连接关系,具有先验连接关系的两个样本端点属于同一样本预测车道中心线;
29.根据权利要求28所述的装置,其中,所述确定模块,具体用于:
30.根据权利要求28所述的装置,
31.根据权利要求30所述的装置,其中,
32.根据权利要求27所述的装置,其中,所述训练模块,具体用于:
33.根据权利要求30所述的装置,其中,所述训练模块,具体用于:
34.根据权利要求31所述的装置,其中,所述训练模块,具体用于:
35.根据权利要求32-34中任一项所述的装置,所述装置还包括:数据清洗模块;
36.根据权利要求35所述的装置,其中,所述所述数据清洗模块,具体用于:
37.根据权利要求27所述的装置,其中,
38.根据权利要求27所述的装置,其中,所述转换模块,具体用于:
39.根据权利要求27所述的装置,其中,所述特征提取模块,具体用于:
40.根据权利要求27或38所述的装置,其中,所述转换模块,具体用于:
41.一种电子设备,包括:
42.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-6或7-20中任一项所述的方法。
43.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-6或7-20中任一项所述的方法。
44.一种自动驾驶车辆,包括车载终端,所述车载终端中部署有根据权利要求7-20中任一项所述的方法训练得到的车道识别模型,所述车载终端用于实现权利要求1-6中任一项所述的方法。
技术总结
本公开提供了一种道路拓扑生成方法、模型训练方法、装置及车辆,涉及数据处理技术领域,尤其涉及人工智能、自动驾驶及智能交通技术领域。实现方案为:从高精地图中获取环境感知数据对应区域的地图车道中心线的端点信息;将环境感知数据转换为环境BEV特征图;基于环境BEV特征图和先验端点位置生成先验特征;利用先验特征识别至少一条预测车道中心线的实际端点位置;基于环境BEV特征图和先验特征确定每条预测车道中心线的两个实际端点位置之间的线段分别与相应预测车道中心线之间的第一位置偏移;基于每个第一位置偏移确定每条预测车道中心线的位置,并基于每条预测车道中心线的位置生成道路拓扑。能够生成在线道路拓扑,提升自动驾驶可靠性。
技术研发人员:马中行,周尧,万国伟,朱振广
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!