一种基于改进DBO和FastICA算法的地铁钢轨波磨识别方法
本发明涉及轨道交通,具体涉及一种基于改进dbo和fastica算法的地铁钢轨波磨识别方法。
背景技术:
1、随着城市轨道运营线路的不断扩大和运行速度的不断提高,钢轨波磨引起的轨道损伤问题日益严重。当车辆在波磨严重的轨道上行驶时,容易引起车辆结构和轨道线路的振动噪声,不仅会影响列车的平稳性和舒适性,还加速了轮轨部件的疲劳损伤,增加养护维修成本。因此,对钢轨波磨进行实时检测、掌握其动态状况,已经成为一项紧迫的工作。
2、现有的地铁钢轨波磨检测手段主要包含人工抽样检测和便携式钢轨波磨检测小车连续测测量两种方法,但是两种方法都存在人工成本高、检测效率低等问题,无法满足地铁钢轨波磨实时、快速检测的需求。
3、目前,很多学者尝试将单通道转换为多通道来分析信号处理,通常采用信号分解方法将加速度信号分解成多个本征模态函数(imfs)来增加维数,即转化为多通道虚拟观测信号。然后利用盲源分离算法(bss)对干扰信号和源信号进行分离。常用的信号分解方法主要包括经验模态分解(emd)、变分模态分解(vmd)和小波变换(wt)等。但是经验模态分解容易受到模态混叠、端点效应的影响。强噪声环境下小波变换难以估计信号分量的频率范围,而且不具有自适应性。vmd作为一种自适应信号分解算法,克服了模态混叠,具有更好的噪声鲁棒性和特征提取能力,对钢轨波磨的分析尤为适用。但是vmd分解信号时需要设置合适的模态分量k和惩罚因子α,其中k值会导致信号的过分解和欠分解,而α值则会造成频带信息的丢失和冗余。
4、虽然国内外学者针对钢轨波磨识别的检测方法开展了大量的研究,但是现有技术存在如下缺点:
5、(1)目前,城市轨道交通缺乏可广泛应用的钢轨波磨识别手段,对钢轨波磨的识别检测仍然以人工巡检的方式为主,存在检测效率低、速度慢等缺点;
6、(2)轨检车轴箱加速度检测数据夹杂着车辆部件噪声和多边形车轮磨损引起的振动信号,钢轨波磨引起的振动特征不显著,无法准确提取钢轨波磨的时频特性。
技术实现思路
1、本发明的目的在于提供一种基于改进dbo和fastica算法的地铁钢轨波磨识别方法,旨在解决现有技术中由于轴箱振动加速度检测数据夹杂着车辆部件噪声和多边形车轮磨损引起的振动信号、导致钢轨波磨引起的振动特征不显著,无法准确提取钢轨波磨幅值的问题。
2、为实现上述目的,本发明提供了一种基于改进dbo和fastica算法的地铁钢轨波磨识别方法,包括下列步骤:
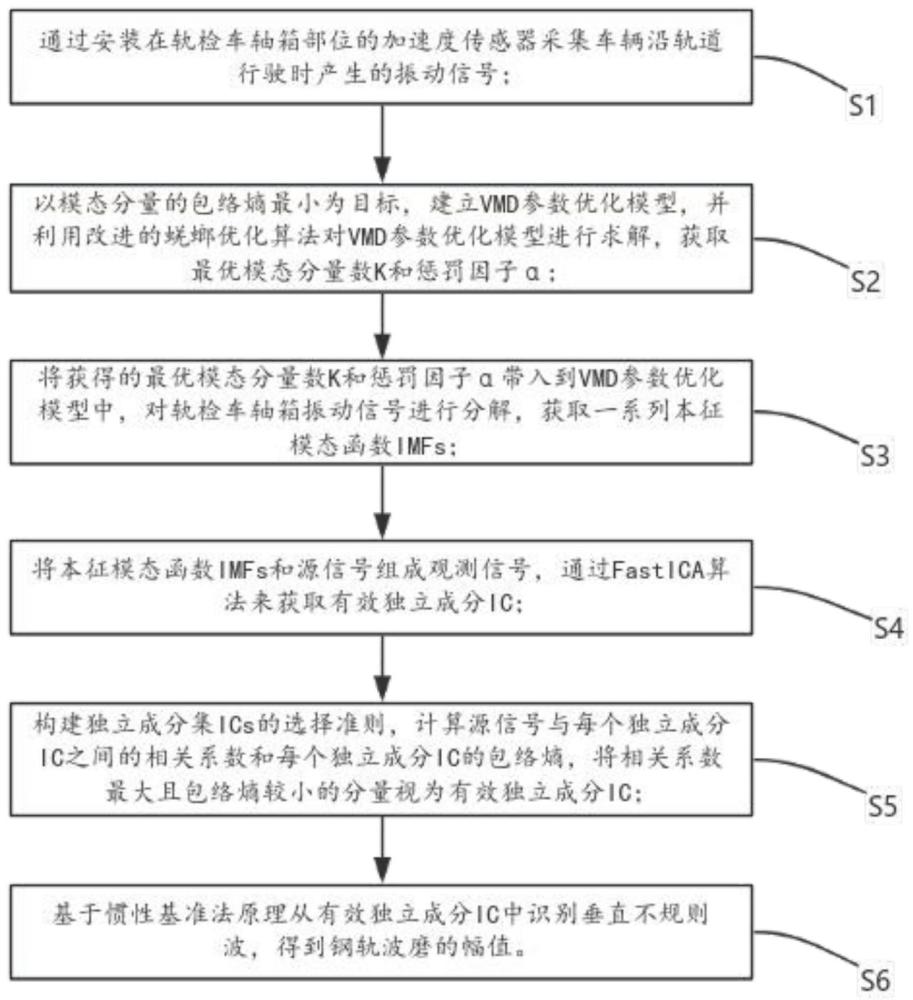
3、步骤1:通过安装在轨检车轴箱部位的加速度传感器采集车辆沿轨道行驶时产生的振动信号;
4、步骤2:以模态分量的包络熵最小为目标,建立vmd参数优化模型,并利用改进的蜣螂优化算法对vmd参数优化模型进行求解,获取最优模态分量数k和惩罚因子α;
5、步骤3:将获得的最优模态分量数k和惩罚因子α带入到vmd参数优化模型中,对轨检车轴箱振动信号进行分解,获取一系列本征模态函数imfs;
6、步骤4:将本征模态函数imfs和源信号组成观测信号,通过fastica算法来获取有效独立成分ic;
7、步骤5:构建独立成分集ics的选择准则,计算源信号与每个独立成分ic之间的相关系数和每个独立成分ic的包络熵,将相关系数最大且包络熵较小的分量视为有效独立成分ic;
8、步骤6:基于惯性基准法原理从有效独立成分ic中识别垂直不规则波,得到钢轨波磨的幅值。
9、可选的,步骤2中利用改进的蜣螂优化算法对vmd参数优化模型进行求解的过程,包括下列步骤:
10、步骤2.1:将cubic混沌映射、改进正弦算法和lévy飞行引入到蜣螂优化算法中,利用cubic混沌映射来提高种群初始解的多样性,减少寻优时间,增加算法的收敛速度;
11、所述cubic混沌映射满足:
12、
13、其中,xn∈(0,1),ρ=1,ρ是控制参数,cubic映射的混沌性与控制参数ρ的取值相关;
14、步骤2.2:改进正弦算法作为替代蜣螂正切跳舞的策略嵌入所述蜣螂优化算法,即在滚球阶段对整个蜣螂个体进行正弦的操作引导滚球蜣螂位置更新,改善原算法中个体间缺乏信息交流的缺陷;
15、步骤2.3:将lévy飞行乘以常数c可以控制步长以符合蜣螂觅食的行为;
16、所述lévy飞行满足:
17、
18、其中,s为lévy飞行路径,β是指数参数,μ和υ为正态分布随机数,且满足:
19、
20、正态分布的标准差,且满足:
21、
22、其中,γ是伽马函数,β是常数。
23、可选的,所述改进正弦算法与原蜣螂优化算法中滚球蜣螂的数学模型的区别在于:
24、原算法中滚球蜣螂的数学模型满足:
25、xi(t+1)=xi(t)+α×k×xi(t-1)+b×δx
26、δx=|xi(t)-xω|
27、其中,xi(t)表示第i只蜣螂在第t次迭代时的位置信息,k表示挠度系数,k∈(0,0.2];b是常量,b∈(0,1);α是自然系数,赋值为1或-1;xω是全局最差位置;δx用于模拟光强的变化;
28、所述改进正弦算法满足:
29、xi(t+1)=ωtxi(t)+r1×sin(r2)×[r3pi(t)-xi(t)];
30、其中,t表示当前迭代次数,xi(t)是个体x在第t次迭代中的第i个位置分量,pi(t)是第t次迭代中最佳个体位置变量的第i个分量,r2是区间[0,2π]上的随机数,r3是区间[-2,2]上的随机数,ωt是惯性权重,r1是非线性递减函数,且满足:
31、
32、其中,ωmax和ωmin分别表示ωt的最大值和最小值,t表示当前迭代次数,tmax表示最大迭代次数。
33、可选的,步骤3的执行过程,具体为以模态分量的包络熵最小为目标,利用蜣螂优化算法进行优化,将获得的vmd模态分量数和惩罚因子带入vmd参数优化模型中进行计算,实现轴箱振动信号分解,获取一系列本征模态函数imfs;
34、vmd参数优化模型满足:
35、
36、其中,ep是包络熵,a(j)是经希尔伯特解调后得到的包络信号,pj是a(j)的归一化形式。
37、可选的,步骤4中,所述fastica算法的执行步骤为:
38、步骤4.1:观测信号预处理,对观测数据g进行中心化处理使其均值为0;
39、步骤4.2:对中心化处理后的信号进行白化处理得到信号z;
40、步骤4.3:选择需要估计的分量个数m,设迭代次数p为1;
41、步骤4.4:选择一个随机的初始矢量wp;
42、步骤4.5:进行迭代计算,即令
43、步骤4.6:正交化wp,令
44、步骤4.7:归一化wp,令
45、步骤4.8:对wp的收敛性和发散性分析,假如不收敛的话,返回步骤4.5;
46、步骤4.9:令p=p+1,如果p≤m,则转到步骤4.4,否则分离一个独立分量,程序结束。
47、可选的,步骤5中,ics的选择准则为:
48、计算源信号与每个ic之间的相关系数和ics的包络熵,相关系数越接近1,ic与源信号的一致性越高,然后,将相关系数最大且包络熵较小的分量视为有效ic;
49、相关系数r满足:
50、
51、其中,sn为采集到的轴箱振动信号,yn为每个独立成分ic,和分别是轴箱振动信号和独立成分ic的数据点均值。
52、可选的,所述惯性基准法是以车体为基准,在车轮未与轨道分离时,车轮轴箱的位移即为轨道垂向不平顺,步骤6的执行过程具体为:首先通过二次积分将加速度信号转换为位移量,再利用最小二乘法消除拟合信号中的趋势项来降低传感器频率范围外低频性能的不稳定和传感器周围的环境干扰,即可得到钢轨波磨的幅值。
53、本发明提供了一种基于改进dbo和fastica算法的地铁钢轨波磨识别方法,首先通过安装在轨检车轴箱部位的加速度传感器采集车辆沿轨道行驶时产生的振动信号;将cubic映射、改进正弦算法和lévy飞行引入蜣螂优化算法中,提出一种改进蜣螂优化方法来优化变分模态分解的参数,提高了vmd参数优化模型的信号分解能力;通过快速独立成分分析法从源信号和本征模态函数imfs中分离出ics;构建ics的选择准则,计算源信号与ics之间的相关系数和ics的包络熵,然后将具有相关系数最大且包络熵较小的分量视为有效ic;基于惯性基准法原理从有效ic中识别垂直不规则波,通过二次积分将有效ic转换为位移量,再利用趋势消除法消除拟合信号中的趋势项,得到钢轨波磨的幅值。通过准确、实时识别出钢轨波磨的幅值大小,本发明可准确评估城市轨道线路的平顺状态及恶化程度,是保障列车安全性、平顺性和稳定性的前提,对于铁路工务养护维修具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!