波前像差计算方法、装置、电子设备及存储介质
本技术涉及计算机,具体而言,本技术涉及一种波前像差计算方法、装置、电子设备及存储介质。
背景技术:
1、光学波前像差检测在多个领域都发挥着重要作用,如天文学中的波前检测和校正、显微镜中的波前检测和校正、光学系统的波前像差测量、光束波前整形和检测,以及人眼成像中的波前像差检测等。其中,基于图像的光学波前像差检测是一种重要的检测方法,具有系统结构简单、易于实现和抗干扰能力强的优点。
2、但是,如何从图像中快速准确地求解波前像差一直是一个具有挑战性的问题。传统方法通常使用成像模型和成像参数构建目标评价函数,然后利用基于梯度下降的非线性最优化算法来搜索最优解。然而,当目标函数在解空间中是非凸函数时,这些基于梯度的优化算法容易陷入局部极小值或鞍点,导致求解结果与真实值偏离较远。此外,非线性优化算法的迭代求解过程需要耗费大量计算时间和计算资源。近年来,深度学习方法蓬勃发展,为基于图像的波前检测注入了强大的发展活力。通过深度学习网络模型,可以直接建立图像与波前像差之间的有效映射,避免了陷入局部极值解和求解时间过长的问题,从而提高了求解精度和速度。然而,深度学习方法需要大量准确标记的训练数据,这对波前检测研究通常是一项艰巨的任务。此外,深度学习方法的可解释性通常较弱。
3、现有技术可以将传统非线性优化算法和神经网络结合起来,采用图像低频傅里叶频谱系数作为神经网络的输入,而神经网络输出的波前像差zernike系数作为非线性优化算法的初始值,虽然这种方法能够大大降低陷入局部极值解的风险并提高迭代收敛速度,但是仍然需要采用非线性迭代优化算法,导致处理速度有限,从而影响计算效率,对此情况有待进一步改善。
技术实现思路
1、本技术各提供了一种波前像差计算方法、装置、电子设备及存储介质,可以解决相关技术中存在的波前像差计算的效率不高的问题。所述技术方案如下:
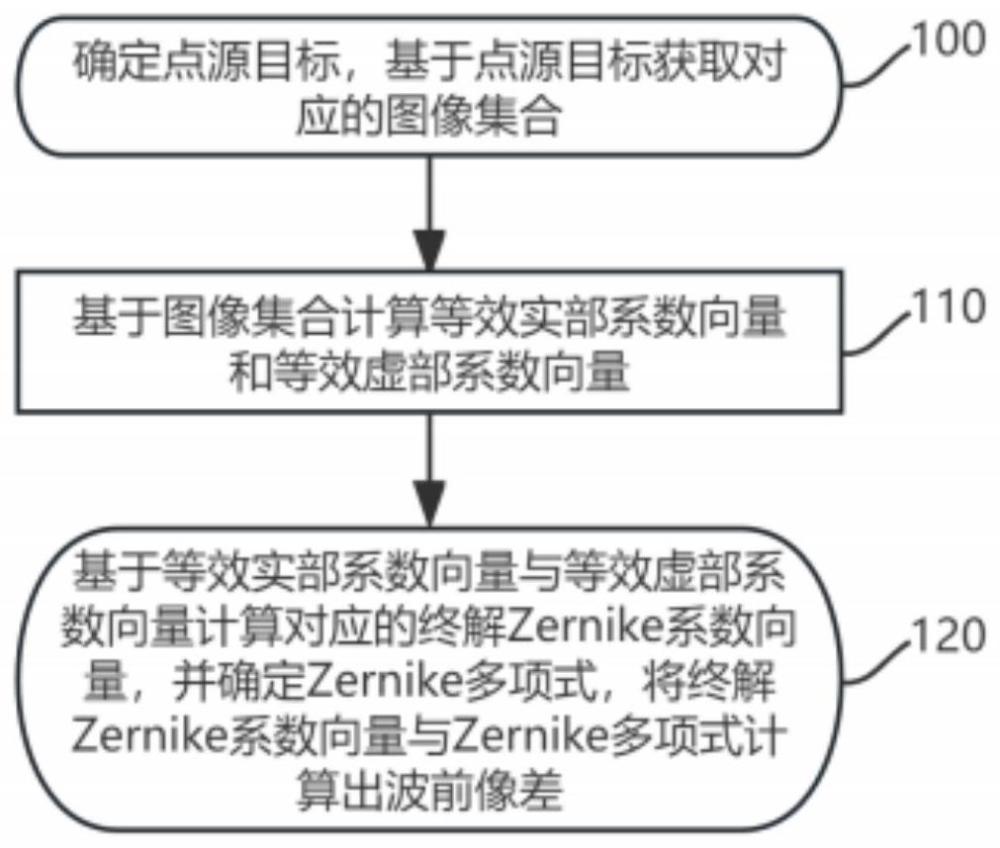
2、根据本技术的一个方面,一种波前像差计算方法,包括:确定点源目标,基于所述点源目标获取对应的图像集合,其中,所述图像集合包括焦面图像以及离焦图像;基于所述图像集合计算等效实部系数向量和等效虚部系数向量;基于所述等效实部系数向量与所述等效虚部系数向量计算对应的终解zernike系数向量,并确定zernike多项式,将终解zernike系数向量与zernike多项式计算出波前像差。
3、根据本技术的一个方面,一种波前像差计算装置,包括:图像集合获取模块,确定点源目标,基于所述点源目标用于获取对应的图像集合,其中,所述图像集合包括焦面图像以及离焦图像;系数向量计算模块,基于所述图像集合用于计算等效实部系数向量和等效虚部系数向量;波前像差计算模块,基于所述等效实部系数向量与所述等效虚部系数向量计算对应的终解zernike系数向量,并确定zernike多项式,将终解zernike系数向量与zernike多项式用于计算出波前像差。
4、在一示例性实施例中,所述装置包括但不限于:
5、傅里叶频谱获取模块,将所述焦面图像以及所述离焦图像均进行二维傅里叶变换,用于获取对应的焦面二维傅里叶频谱f1以及离焦二维傅里叶频谱f2,其中,所述焦面二维傅里叶频谱f1以及所述离焦二维傅里叶频谱f2组成傅里叶频谱fdl,d=1,2;
6、系数向量组合模块,选取所述傅里叶频谱fdl中的实部系数和虚部系数,用于组合成实部系数向量rdl和虚部系数向量idl,d=1,2;
7、实部系数向量计算模块,用于计算所述等效实部系数向量rl=r1l-r2l,虚部系数向量计算模块,用于计算所述等效虚部系数向量il=(i1l+i2l)/2。
8、在一示例性实施例中,所述装置包括但不限于:
9、傅里叶频谱确定模块,选取述焦面二维傅里叶频谱f1以及所述离焦二维傅里叶频谱f2中的低频部分,用于确定傅里叶频谱fdl。
10、在一示例性实施例中,所述装置包括但不限于:
11、实解zernike系数向量确定模块,获取实部求解矩阵,将所述实部求解矩阵乘以所述等效实部系数向量用于确定实解zernike系数向量;
12、虚解zernike系数向量确定模块,获取虚部求解矩阵,将所述虚部求解矩阵乘以所述等效虚部系数向量用于确定虚解zernike系数向量;
13、终解zernike系数向量确定模块,基于所述实解zernike系数向量与所述虚解zernike系数向量用于确定终解zernike系数向量。
14、在一示例性实施例中,所述装置包括但不限于:
15、点扩散函数图像获取模块,用于获取j组点扩散函数图像,其中,每组图像包括焦面点扩散函数图像i1j以及离焦点扩散函数图像i2j,且每组图像拍摄时系统的波前像差jj不同,j=1,2,3,l,j;
16、波前zernike系数向量获取模块,对每组点扩散函数图像i1j和i2j,构建关于波前像差jj的目标评价函数e(i1j,i2j,jj),用于获取对应的波前zernike系数向量zj=(zj1zj2zj3lzjn)t;
17、系数向量获取模块,基于所述点扩散函数图像i1j和所述点扩散函数图像i2j用于获取对应的等效实部系数向量rlj和等效虚部系数向量ilj,j=1,2,3,l,j;
18、zernike系数矩阵构建模块,基于j组点扩散函数图像获取的zernike系数向量zj=(zj1zj2zj3lzjn)t,j=1,2,3,l,j,基于所述zernike系数向量zj=(zj1zj2zj3lzjn)t用于构建zernike系数矩阵;
19、等效实部系数矩阵构建模块,基于j组所述点扩散函数图像的所述等效实部系数向量rlj=(rlj1 rlj2 rlj3 l rljk)t用于构建等效实部系数矩阵,其中,k为等效实部系数向量元素的个数,j=1,2,3,l,j;
20、实部求解矩阵sr确定模块,基于所述等效实部系数矩阵与所述zernike系数矩阵用于确定实部求解矩阵sr。
21、在一示例性实施例中,所述装置包括但不限于:
22、广义逆矩阵计算模块,用于计算所述等效实部系数矩阵rc的广义逆矩阵rpin;
23、实部求解矩阵计算模块,用于计算所述实部求解矩阵sr=zcrpin。
24、在一示例性实施例中,所述装置包括但不限于:
25、波前像差zernike系数向量确定模块,是基于非线性优化算法计算目标评价函数的最小值,将目标评价函数的最小值对应的zernike系数向量用于确定为波前像差zernike系数向量zj=(zj1 zj2 zj3 l zjn)t。
26、根据本技术的一个方面,一种电子设备,包括至少一个处理器以及至少一个存储器,其中,所述存储器上存储有计算机可读指令;所述计算机可读指令被一个或多个所述处理器执行,使得电子设备实现如上所述的波前像差计算方法。
27、根据本技术的一个方面,一种存储介质,其上存储有计算机可读指令,所述计算机可读指令被一个或多个处理器执行,以实现如上所述的波前像差计算方法。
28、根据本技术的一个方面,一种计算机程序产品,计算机程序产品包括计算机可读指令,计算机可读指令存储在存储介质中,电子设备的一个或多个处理器从存储介质读取计算机可读指令,加载并执行该计算机可读指令,使得电子设备实现如上所述的波前像差计算方法。
29、本技术提供的技术方案带来的有益效果是:通过线性化近似点扩散函数图像的低频傅里叶系数与波前像差zernike系数之间的模型关系,实现了从点扩散函数图像低频傅里叶系数直接计算波前像差zernike系数。只需要获取焦面和离焦点扩散函数两幅图像,操作容易实现。在处理过程中,仅需要执行二维傅里叶变换和简单的矩阵运算,计算时间仅为几毫秒,几乎可以实时解决问题,处理速度非常快,在处理小尺度变化的波前像差时,能够获得与当前主流方法相媲美的精度,因此在精度方面没有退化,在可以保证求解精度的情况下,还可以加快处理速度,从而提高计算效率。
30、在上述技术方案中,通过确定点源目标,基于所述点源目标获取对应的图像集合,然后基于所述图像集合计算等效实部系数向量和等效虚部系数向量,最后基于所述等效实部系数向量与所述等效虚部系数向量计算对应的终解zernike系数向量,并确定zernike多项式,将终解zernike系数向量与zernike多项式计算出波前像差;可直接、准确地计算确定光学波前像差,在可以保证求解精度的情况下,还可以加快处理速度,从而提高计算效率。,从而能够有效地解决相关技术中存在的波前像差计算的效率不高的问题。
- 还没有人留言评论。精彩留言会获得点赞!