一种基于图像纹理特征的重力场方向适配性分析方法
本发明涉及一种基于图像纹理特征的重力场方向适配性分析方法,属于水下运载体自主导航定位。
背景技术:
1、水下自主航行器在航行过程中需要导航定位技术为其提供全面可靠的位置、姿态和速度等信息。能够自主输出全参量导航信息的惯导系统是水下运载体自主导航的主要手段。惯性导航系统通过使用加速度计和陀螺仪进行积分运算从而推算运载体的位置和姿态信息。但作为一种航位推算系统,惯性器件的积分作用使误差随时间累积,在水下长航时导航中需要对惯导进行定期校正。因海洋地球物理场信息特征稳定,不易随时空变化,故而地球物理场辅助惯性导航的方式得到广泛关注。重力辅助惯导系统通过分析重力场特征与空间位置存在的特定关系,利用匹配定位算法解算载体当前位置信息。重力场分布的不规则和不确定性会导致匹配效果的不稳定。为了提高重力辅助导航的可靠性,需要研究区域重力场是否适合进行重力辅助导航,如果适合,则认为该区域为适配区,现有适配区选取方法主要有层次分析法和熵值法等,通过计算重力场的统计特征参数对重力场进行适配性分析。但其受人为主观因素影响,会出现适配区选取结果不连续的问题,并且未考虑方向适配信息,难以满足水下运载体机动航行的要求。
技术实现思路
1、有鉴于此,本发明提供了一种基于图像纹理特征的重力场方向适配性分析方法,能够衡量重力场在多方向的适配信息,提高重力辅助惯性导航系统的导航准确率。
2、本发明的技术解决方案是:
3、一种基于图像纹理特征的重力场方向适配性分析方法,包括如下步骤:
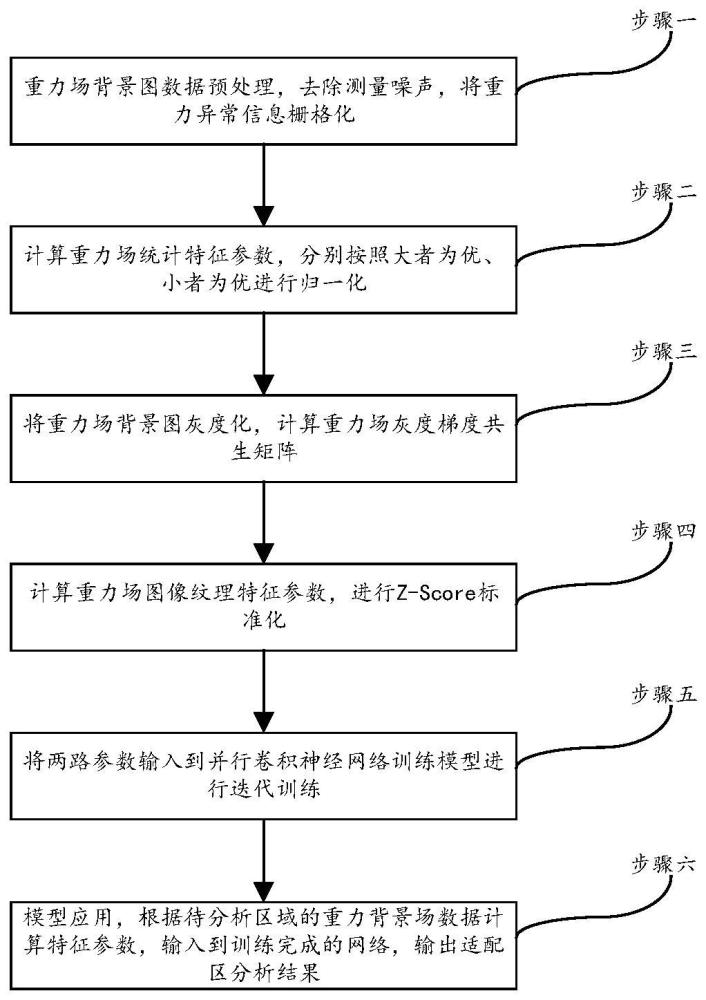
4、步骤一,对重力场背景图进行预处理,去除测量噪声,将重力场背景图进行栅格化;
5、步骤二,计算重力场统计特征参数,分别按照大者为优或小者为优进行归一化;
6、步骤三,将步骤一中栅格化后的重力场背景图依次进行灰度化及灰度归一化处理、梯度化及梯度归一化处理,然后计算重力场灰度梯度共生矩阵;
7、步骤四,根据步骤三得到的重力场灰度梯度共生矩阵计算重力场图像纹理特征参数,按照z-score标准化规则将不同量级的图像纹理特征参数转化为统一分值;
8、步骤五,根据步骤二得到的归一化后的重力场统计特征参数以及步骤四得到的归一化后的图像纹理特征参数,设计并行卷积神经网络模型,利用多个卷积核同时对输入数据集进行特征提取,训练分类网络;
9、步骤六,根据待分析区域的重力场背景图数据计算统计特征参数和图像纹理特征参数,输入到步骤五种已训练完成的并行卷积神经网络模型中,输出适配区分析结果。
10、所述步骤二中,重力场统计特征参数包括重力异常标准差、重力异常经度粗糙度、重力异常纬度粗糙度、重力异常经度相关系数、重力异常纬度相关系数、重力异常坡度以及重力异常变异系数;
11、所述步骤二中,重力异常标准差、重力异常经度粗糙度、重力异常纬度粗糙度、重力异常坡度按照大者为优进行归一化;重力异常经度相关系数、重力异常纬度相关系数、重力异常变异系数按照小者为优进行归一化;
12、所述步骤二中,
13、大者为优归一化公式为:
14、
15、小者为优归一化公式为:
16、
17、其中,(i,j)表示坐标,为第r个重力特征参数计算值,r=1,2,…,7,r=1表示重力异常标准差,以此类推,r=7时表示重力异常变异系数,为归一化后的第r个重力特征参数值,vr表示第r个重力特征参数值集合;
18、所述步骤三中,灰度化公式为:
19、
20、式中,h(i,j)为重力场背景图灰度值,为灰度最大值,为灰度最小值,gra(i,j)为重力场背景图中的重力异常值,为重力异常最大值,为重力异常最小值;
21、灰度归一化公式为:
22、
23、式中,f(i,j)为归一化后的灰度值,nh为归一化的最大灰度级别,为最大灰度值,int表示取整运算;
24、方向角θ对应的梯度化公式为:
25、
26、式中,gθ表示方向角θ对应的梯度值,h表示灰度值,hθ表示sobel算子;
27、整合各个方向的梯度化公式为:
28、
29、式中,gφ(i,j)为各个方向计算的最终梯度值,φ为方向角个数;
30、梯度归一化公式为:
31、
32、式中,g(i,j)表示归一化后的梯度值,ng表示归一化的最大梯度级别,表示最大梯度值;
33、所述重力场灰度梯度共生矩阵中的元素c(m,n)表示归一化后的灰度图像f(i,j)和归一化的梯度图像g(i,j)中同时具有灰度m和梯度n的像素点总和,灰度梯度共生矩阵原点位于矩阵左上角,向下灰度值增加,向右梯度值增加,根据归一化的灰度图像和梯度图像,统计使得f(i,j)=m和g(i,j)=n的个数之和,即为灰度梯度共生矩阵c中的第(m,n)个元素;
34、所述步骤四中,重力场图像纹理特征参数包括小梯度优势、大梯度优势、灰度分布不均匀性、梯度分布不均匀性、能量、灰度均值、梯度均值、灰度标准差、梯度标准差、相关性、灰度熵、梯度熵、混合熵、差分矩以及逆差分矩;
35、所述步骤四中,z-score标准化公式为:
36、
37、式中,xi,j表示所述各特征参数计算值,yi,j表示所述各特征参数归一化分值,μi,j表示所述各特征参数均值,σi,j表示所述各特征参数标准差;
38、所述步骤五中,训练所用数据集以匹配率作为标签进行划分,匹配率计算公式为:
39、
40、式中,pk表示当前k时刻匹配段的匹配率,snum表示当前k时刻匹配段的匹配成功采样点数目,tnum表示当前k时刻匹配段的总匹配采样点数目;
41、所述步骤五中,在并行卷积神经网络模型中,将特征参数映射到高维空间便于分类:
42、gw(x)=wβ(σ(…σ(w1(x))))
43、式中,gw表示网络输出,σ表示激活函数,wβ表示表示第β层卷积神经网络的映射函数。
44、有益效果
45、(1)本发明的方法,综合考虑重力场统计特征参数与图像纹理特征参数,通过两路参数进行候选区域的分析,使选取的适配区更为连续,纹理特征更为明显;其次,训练分类网络时,选取并行卷积神经网络同时将反映重力场统计特征的特征参数与反映图像纹理特征的图像纹理特征参数进行训练,有效提高分类准确率。
46、(2)本发明采用灰度梯度共生矩阵表征重力背景场数据变化特征,并使用使用多方向sobel算子与重力异常灰度值进行卷积运算,计算重力异常值沿不同方向的梯度大小,有效提高重力场多方向匹配精度。
技术特征:
1.一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于包括如下步骤:
2.根据权利要求1所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
3.根据权利要求2所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
4.根据权利要求2所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
5.根据权利要求4所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
6.根据权利要求5所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
7.根据权利要求1所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
8.根据权利要求7所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
9.根据权利要求1所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
10.根据权利要求1所述的一种基于图像纹理特征的重力场方向适配性分析方法,其特征在于:
技术总结
本发明公开了一种基于图像纹理特征的重力场方向适配性分析方法,本发明方法能够选取出重力信息丰富的适配区域,为重力场航迹规划提供方向指导,有效提高重力场多方向匹配精度。本发明综合考虑重力场统计特征参数和图像纹理特征参数,通过融合两者特征进行适配区域的确定,使选取的适配区更为连续,纹理特征更为明显;进行数据集训练时,利用并行卷积神经网络,同时将反映重力场统计特征的统计特征参数与反映图像纹理特征的灰度梯度共生矩阵参数进行训练,将这些特征映射到输出层进行分类,根据分类结果确定重力场适配区域,实现对重力场适配区域的方向适配性评判。
技术研发人员:王博,马子玄,王晓宇
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!