一种基于视频分析的变道检测方法、系统、设备及介质与流程
所属的技术人员知道,本发明可以实现为系统、方法或计算机程序产品,因此,本公开可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是一一但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
背景技术:
1、传统的变道检测方法主要包括以下几个步骤:
2、人工预设或通过图像处理算法检测车道实线;
3、检测车辆的2d包围框;
4、通过跟踪算法确定车辆目标轨迹,通常采用车辆2d框的底边中心点作为轨迹点;
5、判断轨迹点与车道实线是否有交点,若有交点则认为发生实线变道。
6、上述方法有以下几个缺点:
7、人工预设车道线在相机移位时会出现大量漏报和误报,且人工成本高;传统的基于canny边缘检测的图像处理算法检测车道线精度较低,在车道线污损或光线较暗时会存在漏检;
8、传统的车辆检测算法输出的2d包围框在相机侧装时会导致变道检测准确率大幅降低,车辆包围框的底边中心点发生了变道,但是车辆实际并未变道,从而导致误报。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,具体针对变道判断错漏等问题,具体提供了一种基于视频分析的变道检测方法、系统、设备及介质,具体如下:
2、1)第一方面,本发明提供一种基于视频分析的变道检测方法,具体技术方案如下:
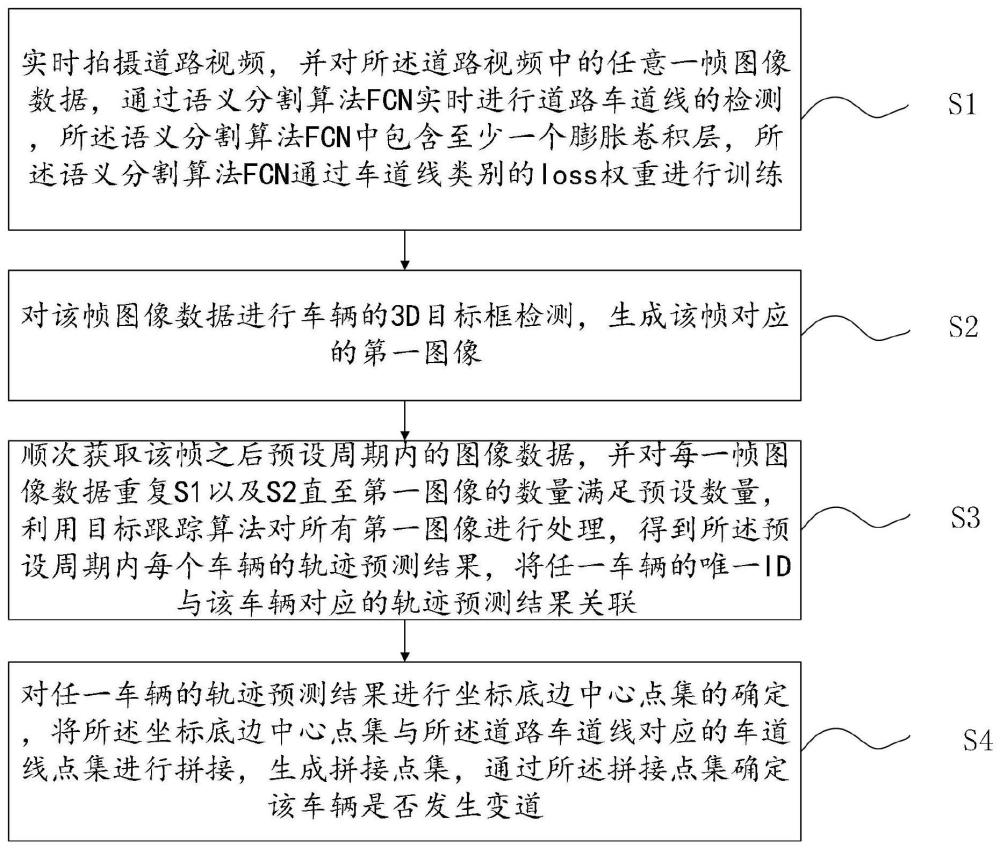
3、s1,实时拍摄道路视频,并对所述道路视频中的任意一帧图像数据,通过语义分割算法fcn实时进行道路车道线的检测,所述语义分割算法fcn中包含至少一个膨胀卷积层,所述语义分割算法fcn通过车道线类别的loss权重进行训练;
4、s2,对该帧图像数据进行车辆的3d目标框检测,生成该帧对应的第一图像;
5、s3,顺次获取该帧之后预设周期内的图像数据,并对每一帧图像数据重复s1以及s2直至第一图像的数量满足预设数量,利用目标跟踪算法对所有第一图像进行处理,得到所述预设周期内每个车辆的轨迹预测结果,将任一车辆的唯一id与该车辆对应的轨迹预测结果关联;
6、s4,对任一车辆的轨迹预测结果进行坐标底边中心点集的确定,将所述坐标底边中心点集与所述道路车道线对应的车道线点集进行拼接,生成拼接点集,通过所述拼接点集确定该车辆是否发生变道。
7、本发明提供的一种基于视频分析的变道检测方法的有益效果如下:
8、基于深度学习语义分割算法自动检测车道线,避免因球机转动导致预设车道线失效,相比传统边缘检测算法课提升检出的稳定性,减少漏报和误报。
9、针对相机侧向视角导致车辆框不能代表实际车辆位置问题,采用3d目标检测算法对车辆进行精定位,避免定位不准导致的漏报和误报。
10、在上述方案的基础上,本发明还可以做如下改进。
11、进一步,所述s2具体包括:
12、通过rtm3d算法对所述图像数据进行车辆的3d目标框检测,生成第一图像。
13、进一步,所述3d目标框中包含每个车辆的位置坐标,所述位置坐标根据每个车辆的车头区域或者车尾区域对应的目标框中的四个点进行确定。
14、进一步,所述通过所述拼接点集确定该车辆是否发生变道的过程为:
15、通过lstm网络对所述拼接点集进行处理,根据所述lstm网络的输出结果判断该车辆是否变道。
16、2)第二方面,本发明还提供一种基于视频分析的变道检测系统,具体技术方案如下:
17、检测模块用于:实时拍摄道路视频,并对所述道路视频中的任意一帧图像数据,通过语义分割算法fcn实时进行道路车道线的检测,所述语义分割算法fcn中包含至少一个膨胀卷积层,所述语义分割算法fcn通过车道线类别的loss权重进行训练;
18、生成模块用于:对该帧图像数据进行车辆的3d目标框检测,生成该帧对应的第一图像;
19、预测模块用于:顺次获取该帧之后预设周期内的图像数据,并对每一帧图像数据重复执行所述检测模块以及所述生成模块,直至第一图像的数量满足预设数量,利用目标跟踪算法对所有第一图像进行处理,得到所述预设周期内每个车辆的轨迹预测结果,将任一车辆的唯一id与该车辆对应的轨迹预测结果关联;
20、判断模块用于:对任一车辆的轨迹预测结果进行坐标底边中心点集的确定,将所述坐标底边中心点集与所述道路车道线对应的车道线点集进行拼接,生成拼接点集,通过所述拼接点集确定该车辆是否发生变道。
21、在上述方案的基础上,本发明还可以做如下改进。
22、进一步,所述s2具体包括:
23、通过rtm3d算法对所述图像数据进行车辆的3d目标框检测,生成第一图像。
24、进一步,所述3d目标框中包含每个车辆的位置坐标,所述位置坐标根据每个车辆的车头区域或者车尾区域对应的目标框中的四个点进行确定。
25、进一步,所述通过所述拼接点集确定该车辆是否发生变道的过程为:
26、通过lstm网络对所述拼接点集进行处理,根据所述lstm网络的输出结果判断该车辆是否变道。
27、3)第三方面,本发明还提供一种计算机设备,所述计算机设备包括处理器,所述处理器与存储器耦合,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现如上任一项方法。
28、4)第四方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现如上任一项方法。
29、需要说明的是,本发明的第二方面至第四方面的技术方案及对应的可能的实现方式所取得的有益效果,可以参见上述对第一方面及其对应的可能的实现方式的技术效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!