用于稀疏点云的高鲁棒性高压电力线分割方法及其应用与流程
本发明涉及激光雷达,具体涉及一种用于稀疏点云的高鲁棒性高压电力线分割方法、装置、设备、存储介质。
背景技术:
1、激光雷达技术生成的点云数据具有坐标精度高和包含三维空间信息等优点,基于点云数据的软件处理技术也在近些年得到快速发展。其中基于激光雷达的点云高压电力线分割提取技术是输电线路运检、电力线路规划、管理与维护等多个领域的核心技术之一。
2、然而,目前对于电力线自动分割提取的算法还处于早期,能够处理单波长激光雷达生成的稀疏点云的算法则更加稀缺。其中大部分算法的核心是利用空间域分割和高程信息的分割算法进行电力线粗分,之后利用霍夫变换识别电力线的2d投影或使用pca算法、ransac算法完成电力线精确分割。此类算法依赖于过滤地面点的结果,在山区等复杂地形表现较差,也会受到地面高程误差的影响。另外,霍夫变换计算效率较低,pca算法对噪声敏感,ransac算法本身具有不确定性且在点数少的情况准确率不高,在进行线性判断时存在限制。此外,分割流程中需要根据实际场景设定众多阈值来保证结果准确性,频繁需要人工干预的问题。
3、可见,基于激光雷达点云数据,继续研发一种高效、准确和鲁棒的高压电力线分割技术将为日益增长的点云高压电力线分割需求提供支持。
技术实现思路
1、本发明克服了现有技术的不足,提供了一种用于稀疏点云的高鲁棒性高压电力线分割方法及其应用,能分割单波长激光雷达产生的稀疏点云。
2、为达到上述目的,本发明采用的技术方案为:一种用于稀疏点云的高鲁棒性高压电力线分割方法,包括以下步骤:
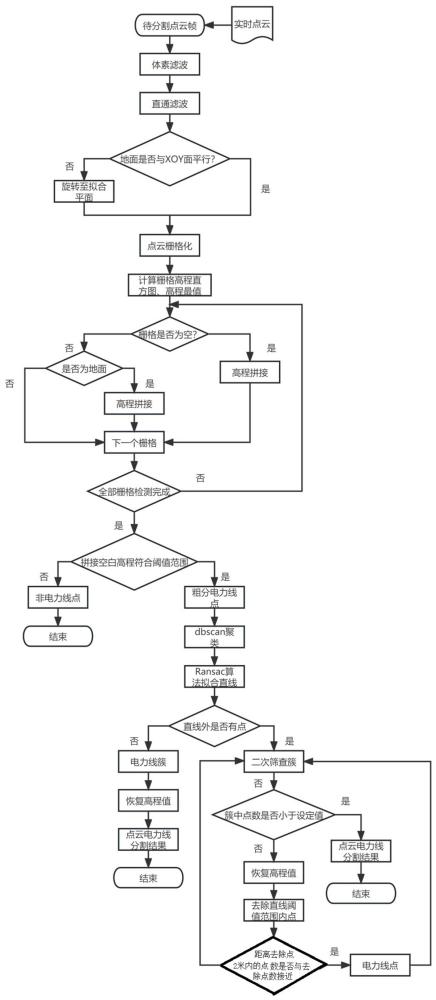
3、步骤a.获取原始点云帧,对原始点云帧进行预处理,所述预处理包括体素滤波减少噪声、直通滤波限定查找范围;
4、步骤b.对经过步骤a预处理后的点云帧进行点云栅格化处理,并对点云帧中的电力线粗分;
5、步骤c.获取步骤b中进行电力线粗分操作后的电力线粗分结果,采用密度筛选和随机抽样一致性直线拟合实现点云三维空间中的电力线点精确提取。
6、本发明一个优选的实施方案中,体素滤波减少噪声包括以下方法:步骤a-11,基于原始点云数据,使用体素滤波去除噪声点;
7、所述直通滤波限定查找范围包括以下步骤:
8、步骤a-21,采用直通滤波限制分割区域,去除激光雷达近端噪声以及远端离散点;
9、步骤a-22,旋转矫正点云帧,包括:检测点云帧中的点云地面是否与三维坐标系xoy平面平行,点云地面与三维坐标系xoy平面存在夹角,则计算夹角的角度并旋转矫正点云帧。
10、具体的,体素滤波基于三维图像中体素的概念,将指定半径的球体中的所有点视为一个体素,然后对球体中的点坐标进行均值操作,得到一个新点代替球体中的所有点。通过对原点云中点的迭代,即可得到平滑的点云。体素滤波可以在不改变点云形状的结构的情况下完成降噪。
11、具体的,限制区域可根据激光雷达的成像质量进行描述,用于降低图像采集设备对分割算法性能和效率的影响。直通滤波是一种基于规则的滤波方式,在使用前需要根据使用目的设定一个或多个阈值,直通滤波将基于阈值对点云中的每个点进行迭代,去除不符合规则的点。在当前步骤中,将直通滤波的阈值设置为y轴坐标大于50且小于600,通过直通滤波将点云近处50米内的噪声和600米外的离散点去除。
12、具体的,对于有联合导航系统的数据,也可根据导航数据完成旋转。
13、本发明一个优选的实施方案中,所述步骤b的具体步骤为:
14、步骤b-1、基于预处理后的点云数据,根据数据质量的质量参数以及描述场景的环境参数,将点云数据进行栅格化处理。
15、步骤b-2、获取栅格化处理后的点云数据,并记录栅格化处理后的点云数据中的栅格坐标。
16、步骤b-3、将预处理后的点云数据根据设定的栅格范围进行栅格化数据处理,栅格化数据处理包括将点云高程分区,并计算高程直方图获得栅格化数据。
17、步骤b-4、基于栅格化数据获取空值间隔,包括:根据设定的参数要求进行栅格拼接操作;获取栅格拼接,并迭代检测栅格,统计高程拼接栅格个数,获取每个栅格对应的高程拼接栅格个数作为空值间隔;
18、步骤b-5、基于拼接栅格获取空值间隔,基于指定的电力线高度阈值,判别空中点是否为电力线粗分结果;基于电力线粗分结果粗分出电力线点云。
19、具体的,环境参数中包括高压电力塔的间隔标准。栅格化处理包括根据环境参数设定栅格范围。
20、本发明一个优选的实施方案中,所述步骤c的具体步骤为:
21、步骤c-1,基于电力线粗分结果,将点云的高程置0;
22、步骤c-2,获取点云的高程置0后的结果,基于点云的高程置0后的结果使用基于密度的聚类算法将点云聚类为多个点云簇;
23、步骤c-3,分析聚类得到的点云簇,计算每个点云簇的点云密度,基于稀疏点云的特点:电力线簇的点云密度较小;通过密度阈值排除密度过大的点云簇,定义一个栅格内的点数小于设定个数则认为是候选的电力线簇;
24、步骤c-4,使用随机样本一致算法拟合电力线簇的最长直线;
25、步骤c-5,在电力线点云中,检查对应簇中是否有其它点到拟合电力线簇的最长直线的距离超出指定阈值,没有其它点则视为电力线簇,有其它点视为二次筛查电力线簇;
26、步骤c-6,对于二次筛查电力线簇,首先在含有高程值的点云中找到对应簇,在簇中去除距离拟合直线在阈值内的点;
27、步骤c-7,对于处理后的簇,利用空间分区数据结构计算距离拟合电力线簇的最长直线的预设长度2米范围内的三维空间点,如果符合距离的点数与去除点集的点数的数量差在1/4以内,则将这些符合距离的点与去除点集均视为电力线点;
28、步骤c-8,在步骤c-7中找到符合要求的电力线点,则将新的电力线点去除后再次进行步骤c-7步骤,若没有符合要求的点,则整个簇视为非电力线簇;
29、步骤c-9,对于步骤c-2得到的每个簇进行步骤c-3至步骤c-8的操作,筛选得到精确点云电力线簇;
30、步骤c-10,基于精确点云电力线簇的结果,恢复对应点的高程值,得到精确高压电力线分割结果。
31、本发明一个优选的实施方案中,基于密度的聚类算法的过程包括以下内容:
32、步骤c-2-1,令点云簇中的点集为,随机样本一致算法拟合直线需要邻域参数,其中为邻域的距离度量值,为最少的密度可达点数量;距离度量采用欧氏距离,欧式距离公式如下:
33、;其中,d为距离,(x1,y1,z1)和(x2,y2,z2)为点集d中任意两个点的坐标,x1,y1,z1和x2,y2,z2分别为两个点的x坐标、y坐标、高程值;
34、步骤c-2-2,初始化核心对象集合ω,ω=φ,φ表示空集;初始化类别k,k=0;
35、步骤c-2-3,遍历点集d的元素,为核心点,则加入核心对象集合ω;
36、步骤c-2-4,核心对象集合ω中的点都已经被访问,则算法结束,否则转入步骤c-2-5,在核心对象集合ω中,随机选择未访问的核心点o,并将核心点o标记为已访问,并赋予类别k;标记后将核心点o的邻域中的未访问点存放在集合seeds中,ε-邻域为步骤c-2-1中的以ε为距离度量值的邻域;
37、步骤c-2-6,判断集合seeds是否为空,集合seeds为空则类别k簇生成完成,令k’=k+1后跳转到步骤c-2-4,k’是更新后的k;集合seeds不为空时,从集合seeds中随机挑选一个点,标记为已访问,并赋予类别为k,判断该点是否为核心点,判断是核心点则将该点的邻域中的未访问点存放在集合seeds中,之后重复步骤c-2-6;判断不是核心点是边界点,则直接重复步骤c-2-6。
38、本发明一个优选的实施方案中,步骤c-3中的密度阈值是基于电力线长度l、体素滤波半径r和单个点云簇中包含的电力线条数n,公式如下:;其中,smooth为误差系数,用于减少误判。
39、本发明一个优选的实施方案中,步骤c-4中,使用随机样本一致算法拟合簇的最长直线包括以下步骤:
40、步骤c-4-1,随机样本一致算法拟合直线时设定三个参数,分别是邻域距离度量值ε,直线上最大点数maxpoints和最大迭代次数n;
41、步骤c-4-2,在包含噪声点的数据中给定的点集中随机选择两个点,计算由这两个点确定的直线;
42、步骤c-4-3,根据包含噪声点的数据中给定的点集中的其它点到直线的距离是否小于门限中邻域距离度量值ε,并将点集分为内点和外点;内点数大于maxpoints则停止循环,内点数小于最大点数maxpoints且在最大迭代次数以内则重复c-4-1至c-4-2,达到最大迭代次数,则包含内点数最多的直线为拟合的最长直线。
43、具体的,空间分区数据结构是kdtree为树形结构,应用于多维空间的关键数据的范围搜索和最近邻搜索;kdtree按照所述点集中每个点的空间位置分割多维数据构建二叉树结构,能够提供快速的查找近邻算法。
44、具体的,二次筛查簇相关步骤可以处理多条高压电力线在xoy平面内的投影直线距离相近但大于设定阈值的情况,利用了同一栅格中多条电力线曲线平行且点数接近的性质。此类情况的多条高压线来自相同的电力塔,两条接近的高程距离在2米左右。
45、本发明一个优选的实施方案中,一种稀疏点云的高鲁棒性高压电力线分割方法的分割装置,包括:
46、点云帧预处理模块,用于:获取原始点云帧,对原始点云帧进行预处理获取预处理后的点云帧数据,所述预处理包括体素滤波减少噪声、直通滤波限定查找范围;
47、电力线粗分模块,用于:根据所述预处理后的点云帧数据,进行点云栅格化处理,并对点云帧中的电力线粗分得到电力线粗分结果;
48、电力线点精确提取模块,用于:根据所述电力线粗分结果,采用密度筛选和随机抽样一致性直线拟合实现点云三维空间中的电力线点精确提取。
49、本发明一个优选的实施方案中,一种用于稀疏点云的高鲁棒性高压电力线分割设备,包括:
50、存储器;
51、处理器;
52、以及
53、计算机程序;
54、其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现稀疏点云的高鲁棒性高压电力线分割方法。
55、本发明一个优选的实施方案中,一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现稀疏点云的高鲁棒性高压电力线分割方法。
56、本发明解决了技术背景中存在的缺陷,本发明有益的技术效果是:
57、本发明的一种稀疏点云的高鲁棒性高压电力线分割方法,可以分割单波长激光雷达产生的稀疏点云。
58、1.本发明使用高程直方图寻找地面点,并视具有高程的栅格为地面,避免成像的高程误差、真实地面的起伏、多波长校准误差等因素对算法产生影响,本发明的高压电力线分割方法具有高鲁棒性。
59、2.本发明利用随机样本一致算法和点到直线距离对粗分的点云簇进行筛选,而非简单的使用直线拟合算法对线性栅格进行判别,对直线拟合算法准确性的依赖度较低,同时对于点云稀疏和噪声较多的情况有更好的鲁棒性。
60、3.本发明中需要人为调整的超参数数量少,其中直通滤波仅需要根据图像采集设备的成像距离进行一次性设定,栅格大小和电力线高度阈值能参考高压输电线的标准设定,特殊场景时仅需参考电力线实际高度即可。算法降低了对人工调参经验的依赖。
61、4.本发明可以准确定位电力线点云,分割结果中可排除树冠点云和电力塔点云。对于稀疏和不连续的电力线点云,方法仍能有效分割。
- 还没有人留言评论。精彩留言会获得点赞!