一种结构先验知识增广与迁移的水下定位方法
本申请涉及海洋工程,尤其涉及一种结构先验知识增广与迁移的水下定位方法。
背景技术:
1、水下机器人代替人工水下测量是未来海洋工程建设与运维的发展趋势,海洋工程精细化作业对水下机器人定位提出了高要求。目前,针对水下机器人绝对定位问题的技术主要包括水下声呐地形匹配和水下视觉匹配,采用声呐测图与水下地形匹配可以实现水下机器人高精度高自主的绝对定位,水下视觉匹配一般在小范围进行,能匹配的前提是获取的数据与待匹配数据具有较好的相关性。
2、但鉴于海洋环境的复杂性、多样性及高动态性特点,现行水下机器人绝对定位技术的性能显著依赖于应用场景,且极度取决于海底地形和工程模型的时效性,导致声呐地形匹配和水下视觉匹配在解决水下机器人的连续性绝对定位问题时存在很强的局限性,特别是在定位场景发生变化时,无法精确确定水下机器人的位姿。
技术实现思路
1、本申请实施例的目的是提供一种结构先验知识增广与迁移的水下定位方法,能够解决在海洋工程环境下,无法精确确定水下机器人的位姿的问题。
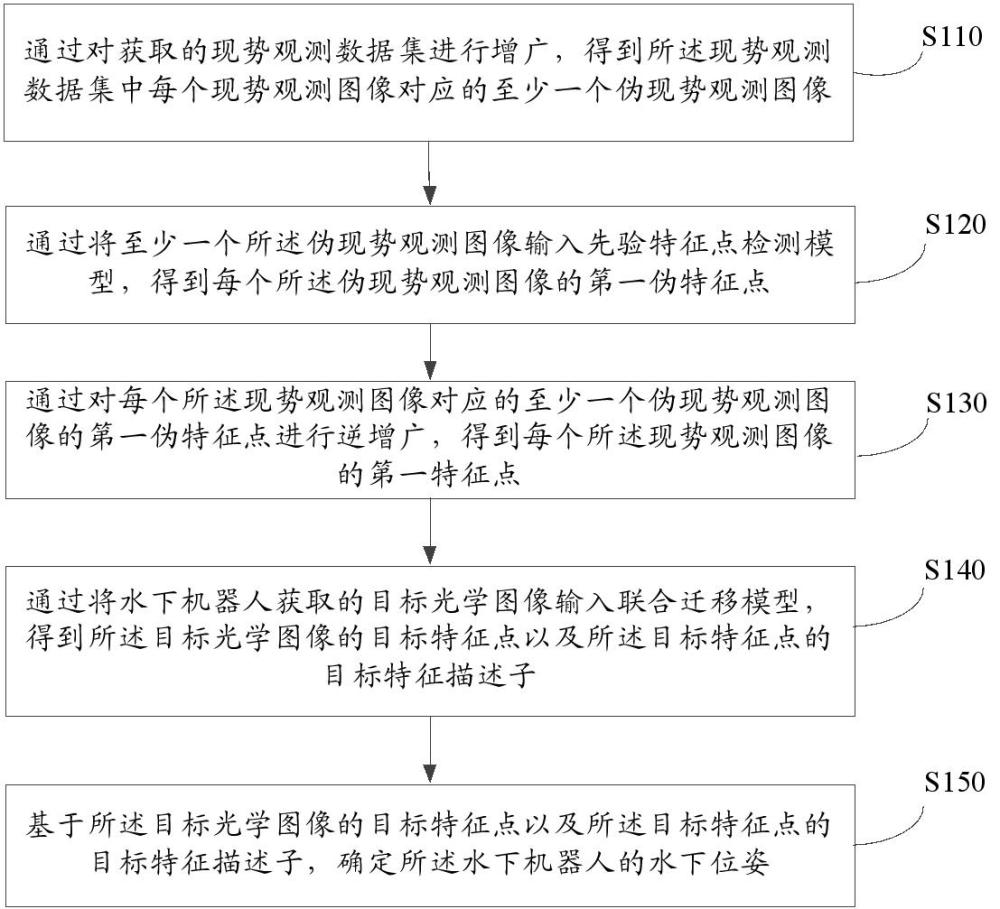
2、为解决上述技术问题,本申请实施例提供了一种结构先验知识增广与迁移的水下定位方法,包括:通过对获取的现势观测数据集进行增广,得到所述现势观测数据集中每个现势观测图像对应的至少一个伪现势观测图像;通过将至少一个所述伪现势观测图像输入先验特征点检测模型,得到每个所述伪现势观测图像的第一伪特征点,其中,所述先验特征点检测模型是基于目标工程结构先验知识库训练得到的,所述目标工程结构先验知识库是基于初始工程结构先验知识库增广得到的,所述目标工程结构先验知识库包括多个目标基础图形,每个所述目标基础图形标记有初始特征点;通过对每个所述现势观测图像对应的至少一个所述伪现势观测图像的所述第一伪特征点进行逆增广,得到每个所述现势观测图像的第一特征点;通过将水下机器人获取的目标光学图像输入联合迁移模型,得到所述目标光学图像的目标特征点以及所述目标特征点的目标特征描述子,其中,所述联合迁移模型是基于每个所述现势观测图像的所述第一特征点与对应的所述伪现势观测图像的所述第一伪特征点进行训练得到的;基于所述目标光学图像的目标特征点以及所述目标特征点的目标特征描述子,确定所述水下机器人的水下位姿。
3、在本申请实施例中,先通过对获取的现势观测数据集进行增广,得到现势观测数据集中每个现势观测图像对应的至少一个伪现势观测图像;通过将至少一个伪现势观测图像输入先验特征点检测模型,得到每个伪现势观测图像的第一伪特征点,其中,先验特征点检测模型是基于目标工程结构先验知识库训练得到的,该目标工程结构先验知识库是基于初始工程结构先验知识库增广得到的,目标工程结构先验知识库包括多个目标基础图形,每个目标基础图形标记有初始特征点;通过对每个现势观测图像对应的至少一个伪现势观测图像的第一伪特征点进行逆增广,得到每个现势观测图像的第一特征点;通过将水下机器人获取的目标光学图像输入联合迁移模型,得到目标光学图像的目标特征点以及目标特征点的目标特征描述子,其中,联合迁移模型是基于每个现势观测图像的第一特征点与对应的伪现势观测图像的第一伪特征点进行训练得到的;最后,基于目标光学图像的目标特征点以及目标特征点的目标特征描述子,确定水下机器人的水下位姿,即利用海洋工程人造环境中水下构筑物先验结构特征不会发生本质的变化这一特点,构建面向海洋工程的目标工程结构先验知识库和先验特征点检测模型,利用知识迁移设计现势特征点的联合检测和描述方法,最终形成基于联合迁移模型的绝对定位技术,实现水下机器人的高精度、高自主的绝对定位,进一步,能够解决海洋工程环境中,水下机器人绝对定位性能的环境相关性和时效性问题。
技术特征:
1.一种结构先验知识增广与迁移的水下定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述通过将至少一个所述伪现势观测图像输入先验特征点检测模型,得到每个所述伪现势观测图像的第一伪特征点之前,还包括:
3.根据权利要求1所述的方法,其特征在于,所述先验特征点检测模型包括第一深度特征提取器和第一特征点复合检测器;
4.根据权利要求3所述的方法,其特征在于,所述通过将所述空间维度特征图集输入所述第一特征点复合检测器,得到每个所述目标基础图形的预测特征点,包括:
5.根据权利要求1所述的方法,其特征在于,所述通过对每个所述现势观测图像对应的至少一个所述伪现势观测图像的所述第一伪特征点进行逆增广,得到每个所述现势观测图像的第一特征点,包括:
6.根据权利要求1所述的方法,其特征在于,所述联合迁移模型包括第二深度特征提取器、第二特征点复合检测器和联合特征描述器;
7.根据权利要求6所述的方法,其特征在于,获取所述第二特征点复合检测器对应的第二损失值,包括:
8.根据权利要求7所述的方法,其特征在于,获取所述联合特征描述器对应的第三损失值,包括:
9.根据权利要求1-8任一项所述的方法,其特征在于,所述基于所述目标光学图像的目标特征点以及所述目标特征点的目标特征描述子,确定所述水下机器人的水下位姿,包括:
10.根据权利要求9所述的方法,其特征在于,在基于所述目标特征点与所述标准特征点的对应关系,确定所述水下机器人的水下位姿之后,还包括:
技术总结
本申请实施例提供了一种结构先验知识增广与迁移的水下定位方法,包括:通过对获取的现势观测数据集进行增广,得到现势观测数据集中每个现势观测图像对应的至少一个伪现势观测图像;通过将至少一个伪现势观测图像输入先验特征点检测模型,得到每个伪现势观测图像的第一伪特征点;通过对每个现势观测图像对应的至少一个伪现势观测图像的第一伪特征点进行逆增广,得到每个现势观测图像的第一特征点;通过将水下机器人获取的目标光学图像输入联合迁移模型,得到目标光学图像的目标特征点以及目标特征点的目标特征描述子;基于目标光学图像的目标特征点以及目标特征点的目标特征描述子,确定水下机器人的水下位姿。
技术研发人员:张德津,王冰,何莉,周宝定,刘宇浩,艾志强
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!