一种基于边缘计算的无人机智能巡园方法及系统
本发明涉及图像处理,更具体地说,它涉及一种基于边缘计算的无人机智能巡园方法及系统。
背景技术:
1、为谋求果园获得较高经济效益、生态效益和社会效益,通常会根据树龄、树势和环境条件的变化对树体进行管理和灾害防治,树体管理和灾害防治需要人工持续进行巡视,耗费大量人力、物力,同时存在时间长,效率差,视野狭窄等问题。
2、随着科技的不断进步和发展,无人机的应用范围越来越广泛,其中之一就是用于智能巡检以及相关领域的研究和发展,基于无人机技术的智能巡检,具有高效、精准、可靠、安全等特点。
3、无人机巡园使用的实时检测算法是提高果园管理效率的重要手段,但是,传统的检测算法需要对整张图片进行处理,计算量大,使得算法的检测速度较低,无法满足实时检测的需求,目前缺乏应用于无人机巡园任务的智能实时检测算法。
4、所以,基于上述问题,申请人提供了一种基于边缘计算的无人机智能巡园方法及系统。
技术实现思路
1、本发明的目的是提供一种基于边缘计算的无人机智能巡园方法及系统,该发明通过swin transformer模型对yolo x神经网络进行改进的方式,能够有效地扩大感受野,进而有效地提高了果园异常农情信息的识别效率,同时,通过对构建的识别模型进行模型压缩,以得到轻量化识别模型,能够缓解模型过大的问题,提高算法的检测速度。
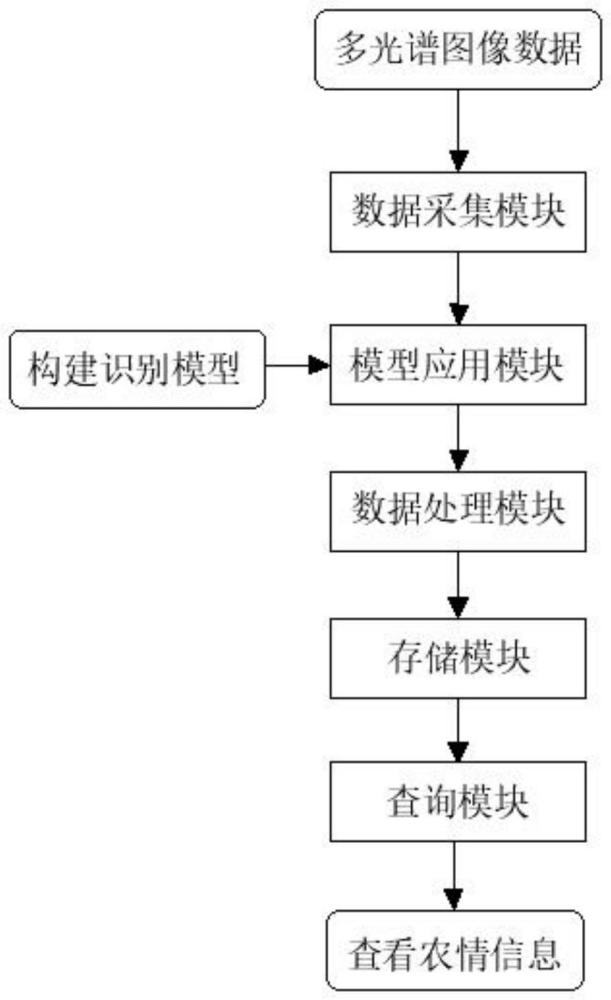
2、本发明的上述技术目的是通过以下技术方案得以实现的:一种基于边缘计算的无人机智能巡园方法及系统,包括数据采集模块、模型应用模块、数据处理模块、存储模块和查询模块;
3、所述数据采集模块用于获取多光谱图像数据并对其进行数据标注,同时将标注好的数据随机划分成多个数据集,通过使用混合数据增强方法增加据集的大小和多样性;
4、所述模型应用模块用于构建初始识别模型,同时调用数据处理模块中的数据集对识别模型进行训练,并通过剪枝算法进行模型压缩,生成轻量化识别模型;
5、所述数据处理模块用于调用模型应用模块中的轻量化识别模型,同时调用数据采集模块中的数据集,使用芯片内嵌的算法进行预测,得到果园农情信息;
6、所述存储模块用于获取数据处理模块中的信息数据并将其分类存储至云端数据库中;
7、所述查询模块用于查询云端数据库中的信息并将其显示在终端。
8、通过采用上述技术方案,在模型应用模块中利用swin transformer模型对yolo x神经网络进行改进的方式,能够有效地扩大感受野,进而有效地提高了果园异常农情信息的识别效率,同时,通过对构建的识别模型进行模型压缩,以得到轻量化识别模型,能够缓解模型过大的问题,提高算法的检测速度。
9、本发明进一步设置为:所述混合数据增强方法具体包括标准数据增强方法、cutout数据增强方法和mixup数据增强方法。
10、通过采用上述技术方案,在混合数据增强方法中包括标准数据增强方法、cutout数据增强方法和mixup数据增强方法,能够增加训练数据集的大小和多样性,有助于解决过拟合问题,提高模型的鲁棒性和泛化能力。
11、本发明进一步设置为:所述模型应用模块通过swintransformer模型对yolo x神经网络进行改进,构建得到初始识别模型。
12、通过采用上述技术方案,在模型应用模块通过swintransformer模型对yolo x神经网络进行改进,构建得到初始识别模型,能够采用移动窗口的方法实现跨窗口连接,使模型可以关注到相邻其他窗口的相关信息,进行跨窗口的特征交互,一定程度上扩大了感受野,从而带来更高的效率。
13、本发明进一步设置为:所述数据处理模块采用边缘计算算法应用在本地网络。
14、通过采用上述技术方案,采用边缘计算可以在本地网络中运行应用程序和服务,而不是将它们发送到云端进行处理,这样可以减少延迟和带宽使用,同时提高数据安全性和隐私性。
15、本发明进一步设置为:所述查询模块中能够通过不同颜色表示不同区域情况。
16、通过采用上述技术方案,在查询模块中能够通过不同颜色表示不同区域情况,能够更加直观的将不同区域的信息呈现出来,帮助用户快速识别和理解信息。
17、本发明的上述技术目的是还通过以下技术方案得以实现的:一种基于边缘计算的无人机智能巡园方法,其特征是:具体包括如下步骤:
18、s1:预设无人机飞行路径,将搭载有多光谱智能巡园装置的无人机按照飞行路径进行飞行,同时拍摄得到初始多光谱图像数据;
19、s2:对初始多光谱图像数据进行数据预处理,得到数据集;
20、s3:采用swin transformer模型对yolo x神经网络进行改进得到轻量化识别模型,利用轻量化识别模型对无人机采集到的待分析图像进行实时处理和分析,生成果园异常农情信息。
21、s4:将无人机获取到的图像和果园异常农情信息进行存储和传输至云端。
22、通过采用上述技术方案,将初始多光谱图像数据进行数据预处理,同时利用模型压缩得到轻量化识别模型生成果园异常农情信息,能够利用无人机实时遥感方式,从低空视角监测果园的病害植株或异常区域,可大大提高智慧果园中的巡园效率和反应速度。
23、本发明进一步设置为:所述s1中所述多光谱智能巡园装置包括多光谱相机、边缘计算平台和无线传输模块且封装在两侧安装有天线的盒子内,同时通过安装自稳云台的方式固定在无人机上。
24、通过采用上述技术方案,多光谱智能巡园装置包括多光谱相机、边缘计算平台和无线传输模块且封装集成在一个盒子里,两边安装有天线用于增强无线传输信号,使无线传输信号覆盖更立体、更全面,无人机通过安装自稳云台的方式将该装置固定在无人机上,使得进一步提高拍摄的稳定性和精度,获得高质量的实时图像数据。
25、综上所述,本发明具有以下有益效果:
26、1、在模型应用模块中利用swin transformer模型对yolo x神经网络进行改进的方式,能够有效地扩大感受野,进而有效地提高了果园异常农情信息的识别效率,同时,通过对构建的识别模型进行模型压缩,以得到轻量化识别模型,能够缓解模型过大的问题,提高算法的检测速度;
27、2、在混合数据增强方法中包括标准数据增强方法、cutout数据增强方法和mixup数据增强方法,能够增加训练数据集的大小和多样性,有助于解决过拟合问题,提高模型的鲁棒性和泛化能力;
28、3、在模型应用模块通过swin transformer模型对yolo x神经网络进行改进,构建得到初始识别模型,能够采用移动窗口的方法实现跨窗口连接,使模型可以关注到相邻其他窗口的相关信息,进行跨窗口的特征交互,一定程度上扩大了感受野,从而带来更高的效率;
29、4、采用边缘计算可以在本地网络中运行应用程序和服务,而不是将它们发送到云端进行处理,这样可以减少延迟和带宽使用,同时提高数据安全性和隐私性;
30、5、在查询模块中能够通过不同颜色表示不同区域情况,能够更加直观的将不同区域的信息呈现出来,帮助用户快速识别和理解信息;
31、6、将初始多光谱图像数据进行数据预处理,同时利用模型压缩得到轻量化识别模型生成果园异常农情信息,能够利用无人机实时遥感方式,从低空视角监测果园的病害植株或异常区域,可大大提高智慧果园中的巡园效率和反应速度;
32、7、多光谱智能巡园装置包括多光谱相机、边缘计算平台和无线传输模块且封装集成在一个盒子里,两边安装有天线用于增强无线传输信号,使无线传输信号覆盖更立体、更全面,无人机通过安装自稳云台的方式将该装置固定在无人机上,使得进一步提高拍摄的稳定性和精度,获得高质量的实时图像数据。
- 还没有人留言评论。精彩留言会获得点赞!