一种动静态参数互校正的滑板底盘车辆关键参数估计方法
本发明涉及一种动静态参数互校正的滑板底盘车辆关键估计方法。
背景技术:
1、作为智能电动汽车的核心,智能底盘的研究至关重要,滑板底盘更是当前汽车底盘行业最重要的革命性技术之一。目前关于滑板底盘的相关研究较少,由于分体式结构导致自身静态参数不固定,因此准确地估计滑板底盘车辆关键动静态参数对于滑板底盘汽车的安全性而言十分重要。
2、目前大多数方法都是使用无迹卡尔曼滤波或扩展卡尔曼滤波进行车辆状态估计,然而扩展卡尔曼滤波在非线性系统的效果并不好,无迹卡尔曼滤波则需要解复杂的雅克比矩阵,在观测高维非线性系统效果和精度均低于容积卡尔曼滤波。ckf算法虽然估计精度较高且实现方式简单,但缺少对突变目标的自适应跟踪能力。为了保持强跟踪滤波器的特性,将时变渐消因子引入到预测协方差矩阵中,以削减过去数据对当前滤波值的影响,因此使用stckf作为状态观测器。滑板底盘车辆上装不固定,底盘轴距可调节,静态参数也会因此改变,目前关于静态参数的估计并不多,因此对于滑板底盘车辆关键参数的准确估计很有价值。
技术实现思路
1、本发明的目的在于克服现有技术中的不足之处,提出一种动静态参数互校正的滑板底盘车辆关键参数估计方法。
2、为了实现本发明的目的,本发明将采用如下技术方案加以实施。
3、一种动静态参数互校正的滑板底盘车辆关键参数估计方法,该方法包括:
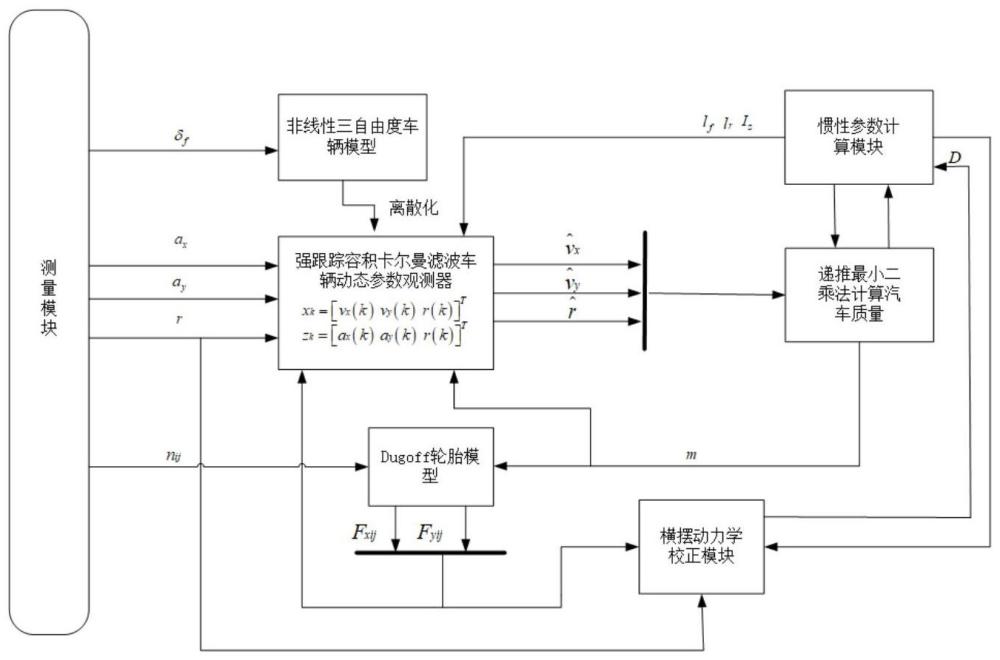
4、步骤1、假设一个初始的汽车质量m,并假设加载在汽车后部的载荷离初始质心位置最远距离d,不考虑质心在垂向以及横向的偏移,通过车辆惯性参数计算模块计算相关的静态参数;
5、步骤2、搭建非线性三自由度车辆模型,以及通过测量模块中的汽车通讯网络采集车载传感器信号,所述的车载传感器信号包括前轮转角δf、纵向加速度ax、侧向加速度ay和横摆角速度r以及四轮转速ωij;
6、步骤3、基于dugoff轮胎模型,计算出车轮的纵向力fxij和侧向力fyij;
7、步骤4、依据离散化的非线性三自由度车辆模型,建立以纵向力fxij、侧向力fyij、前轮转角δf、横摆角速度r、纵向加速度ax和侧向加速度ay以及通过步骤1中的车辆惯性参数计算模块计算获得的静态参数作为输入、以纵向速度vx、侧向速度vy和横摆角速度作为状态量和以横摆角速度r,纵向加速度ax和侧向加速度ay作为观察量以及以车辆的纵向速度侧向速度横摆角速度作为输出的强跟踪容积卡尔曼滤波车辆动态参数观测器;
8、步骤5、搭建线性二自由度车辆模型,使用递推最小二乘法对车辆总质量进行估计;
9、步骤6、通过横摆动力学模型对步骤1中的加载的载荷离初始质心位置最远的距离d进行校正,并根据校正的结果进行更新,反复执行步骤1到5,在反复执行步骤1到5的过程中,步骤1中的汽车质量假设值m被步骤5计算出的车辆总质量的估计值替代,步骤5计算出的估计值会收敛至一个定值。
10、优选,在步骤1中,如果载荷加载在汽车的前部,d值设定为负值。
11、优选,所述的静态参数包括质心到前轴的距离lf、质心到后轴的距离lr和汽车绕z轴的转动惯量iz以及汽车质量m。
12、优选,所述的步骤2中的纵向加速度ax、侧向加速度ay和横摆角速度r是由imu传感器测量获得的。
13、优选,所述的步骤2中的四轮转速ωij是通过轮速传感器测量获得的。
14、进一步,所述步骤1中的车辆惯性参数计算模块如下所述:
15、m=m0+mp
16、通过杠杆定律得到质心位置的偏移量:
17、mdn=mpd
18、根据质心位置的偏移计算惯性参数:
19、
20、其中lf0,lr0,m0,iz0为车辆未加载载荷时的质心到前后轴距离,质量以及转动惯量,mp为载荷质量,dn为质心跟初始质心的距离。
21、进一步,所述步骤2中的非线性三自由度车辆模型如下所述:
22、
23、
24、
25、
26、其中:fxij为轮胎纵向力,fyij为轮胎侧向力,fzij为轮胎垂直载荷,其中i代表前轮或后轮,j代表左轮或右轮;lf为质心到前轴的距离;lr为质心到后轴的距离;h为质心高度;l为前轴到后轴的距离;r为横摆角速度;m为汽车质量;ax为汽车纵向加速度;ay为汽车侧向加速度;αfl,fr为左前轮和右前轮的轮胎侧偏角;αrl,rr为左后轮和右后轮的轮胎侧偏角;vfl,fr为左前轮和右前轮的车轮中心速度;vrl,rr为左后轮和右后轮的车轮中心速度;vx为车辆纵向车速;vy为车辆侧向车速;β为质心侧偏角;iz为汽车绕z轴的转动惯量;δf为前轮转角;tw为轮距,假设前轮与后轮轮距相同。
27、进一步,所述步骤4中的强跟踪容积卡尔曼滤波车辆动态参数观测器的观测方程如下:
28、建立系统的非线性系统模型:
29、xk=f(xk-1)+wk-1;
30、zk=h(xk)+vk;
31、式中:xk为k时刻的目标状态向量,yk为k时刻的量测向量,其中xk=[vx(k) vy(k) r(k)]t,zk=[ax(k) ay(k) r(k)]t,wk和vk分别是过程噪声序列和量测噪声序列,并假设其均为均值为0,互不相关的高斯白噪声,wk~(0,qk),vk~(0,rk);
32、给定k-1时刻的状态估计和协方差矩阵:
33、
34、k=0时,滤波器初始化为p0|0=p0;
35、利用下列式子产生容积点:
36、
37、
38、其中式中n=3,m=6,[1]表示n维空间的点集,即:
39、
40、根据非线性模型进行容积点的非线性传播:
41、
42、状态步预测和预测方差:
43、
44、
45、状态更新,根据k时刻的估计,计算容积点:
46、
47、
48、根据非线性模型进行容积点的非线性传播:
49、zi,k|k-1=h(xi,k|k-1),i=1,2,…,m;
50、进行量测预测,新息协方差矩阵,互协方差矩阵的计算:
51、
52、
53、
54、引入强跟踪滤波理论,计算渐消因子λk:
55、
56、
57、
58、nk=vk-hqk-1ht-σrk-1;
59、mk=pzz,k|k-1+nk-vk;
60、
61、
62、其中:σ为弱化因子,ρ为遗忘因子,且0<ρ≤1,一般取ρ=0.95。
63、将渐消因子λk代入pk|k-1中,即:
64、
65、将新的pk|k-1代入量测更新步,计算加入渐消因子的量测预测,新息协方差矩阵以及互协方差矩阵,并计算卡尔曼增益kk:
66、
67、计算经过量测更新后的状态变量以及协方差矩阵:
68、
69、
70、进一步,所述步骤5中的递推最小二乘法如下所述:
71、汽车总质量辨识模型如下:
72、
73、rls输入输出递推模型如下:
74、
75、
76、令θ=[m],进行车辆总质量估计:
77、参数辨识增益:
78、
79、参数辨识更新:
80、
81、辨识误差更新:
82、
83、进一步,所述的步骤6中的横摆动力学模型如下:
84、
85、有益效果
86、本发明可以较为精确的估计车辆状态,使用对模型参数的不确定性具有鲁棒性的强跟踪容积卡尔曼滤波估计车辆动态参数,同时使用rls估计汽车质量,最后使用基于横摆动力学的参数校正模块调整静态参数,实现了动静态参数互校正,可以最大限度地提升滑板底盘车辆关键参数估计的准确性。
- 还没有人留言评论。精彩留言会获得点赞!