路线规划方法、装置及计算机设备与流程
本发明涉及计算机辅助设计,具体涉及一种路线规划方法、装置及计算机设备。
背景技术:
1、公路是国家服务民生发展与经济建设的重要载体,也是推进国家战略目标的有力支撑。
2、相关技术中,在公路自动化设计的过程中,需要从起点到终点规划一条在满足各项技术指标的前提下,设计一条成本相对较低、公路相对较短的路线方案。无论是满足技术指标,还是经济指标的计算,或是禁止通过区域的限制,这个过程都存在大量的计算,需要大量人工的参与,不仅存在较高的人力成本,而且不能实现公路路线的全自动化设计,导致公路路线的生成速度较慢。
技术实现思路
1、有鉴于此,本发明提供了一种路线规划方法、装置及计算机设备,以解决难以实现公路路线自动化设计的问题。
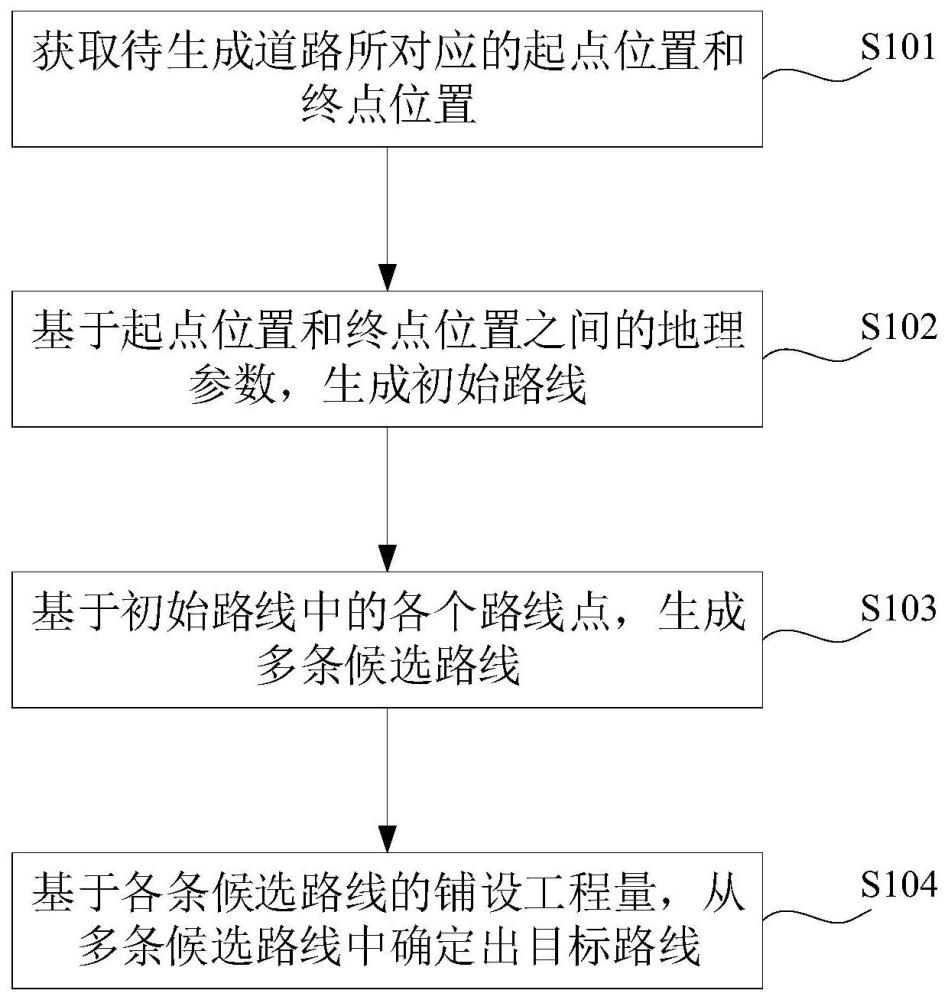
2、第一方面,本发明提供了一种路线规划方法,包括:获取待生成道路所对应的起点位置和终点位置;基于起点位置和终点位置之间的地理参数,生成初始路线;基于初始路线中的各个第一路线点,生成多条候选路线;基于各条候选路线的铺设工程量,从多条候选路线中确定出目标路线。
3、本发明实施例提供的路线规划方法,在获取到待生成道路所对应的起点和终点之间的地理参数后,生成起点和终点之间的初始路线。并根据初始路线中的各个中间路线点,生成多条不同的候选路线,从而根据各条候选路线的铺设工程量选择出待生成道路对应的最优目标路线。因此,能够实现公路的全自动化设计,并丰富了路线生成的多样性,可以快速输出更多的路线结果,从而选取更优的公路路线。
4、在一种可选的实施方式中,基于起点位置和终点位置之间的地理参数,生成初始路线,包括:基于地理参数,确定起点位置和终点位置之间的直线路径;从直线路径上提取起点位置和终点位置之间的多个第一目标点;基于各个第一目标点,在预设方向和第一预设距离上,确定出与各个第一目标点对应的第二目标点;将各个第一目标点与各个第二目标点进行依次连接,生成初始路线。
5、本发明实施例提供的路线规划方法,当确定起点位置和终点位置之间的直线路径后,从直线路径上提取起点位置和终点位置之间的多个第一目标点。并在各个第一目标点的预设方向上,以第一预设距离确定出与各个第一目标点对应的第二目标点。将各个第一目标点与各个第二目标点进行依次连接,生成初始路线,从而通过设定多个中间目标点,使得生成的初始路线能够快速通过大范围的禁止区域。
6、在一种可选的实施方式中,基于各个第一目标点,在预设方向和第一预设距离上,确定出与各个第一目标点对应的第二目标点,包括:基于第一预设距离,确定各个第一目标点在预设方向上的多个第一候选位置点;基于多个第一候选位置点,确定各个第一目标点对应的多个目标候选位置点;确定多个目标候选位置点中的最优候选位置点;将各个最优候选位置点确定为各个第一目标点对应的第二目标点。
7、本发明实施例提供的路线规划方法,在各个第一目标点的预设方向上,确定出多个第一候选位置点。根据各个第一候选位置点的地理参数信息,在多个第一候选位置点中确定出多个目标候选位置点,并从多个目标候选位置点选出最优的候选位置点,将各个最优候选位置点确定为各个第一目标点对应的第二目标点。因此,能够避免计算目标候选位置点时可能出现的不合理结果,使得公路生成时距离禁止区域过近。
8、在一种可选的实施方式中,确定各个第一目标点与各个第二目标点之间的连线角度;判断各个连线角度是否满足预设的直线条件;当确定当前连线角度满足预设的直线条件时,删除当前第二目标点;将当前第一目标点与下一个第二目标点连接。
9、本发明实施例提供的路线规划方法,通过判断各个第一目标点与各个第二目标点之间的连线角度是否满足预设的直线条件,确定是否除当前第二目标点,并将当前第一目标点与下一个第二目标点连接,从而在避开禁止区域的同时也能避免因躲避禁止区域所产生的绕路。
10、在一种可选的实施方式中,基于初始路线中的各个路线点,生成多条候选路线,包括:获取各个路线点在初始路线中的位置;针对各个路线点中的任意一个目标路线点,确定与目标路线点间隔第二预设距离的多个第一位置点;基于第一位置点的地理位置参数,从多个第一位置点中确定出多个第二候选位置点;针对任意一个第二候选位置点,确定与第二候选位置点间隔第三预设距离的多个第二位置点;基于第二位置点的地理位置参数,从多个第二位置点中确定出多个第三候选位置点;基于多个第二候选位置点和多个第三候选位置点,生成多条候选路线。
11、本发明实施例提供的路线规划方法,在获取到各个路线点在初始路线中的位置后,针对各个路线点中的任意一个目标路线点,确定与目标路线点间隔第二预设距离的多个第一位置点,根据第一位置点的地理位置参数,从多个第一位置点中确定出多个第二候选位置点。并继续针对任意一个第二候选位置点,确定与第二候选位置点间隔第三预设距离的多个第二位置点,根据第二位置点的地理位置参数,从多个第二位置点中确定出多个第三候选位置点,从而生成多条候选路线。因此,通过选取多个局部位置点,使得能够生成更多的路线结果,用于最终的候选路线比较。
12、在一种可选的实施方式中,基于第一位置点的地理位置参数,从多个第一位置点中确定出多个第二候选位置点,包括:确定各个第一位置点的朝向权重和高度权重;基于各个朝向权重和各个高度权重,从多个第一位置点中确定出多个第二候选位置点。
13、本发明实施例提供的路线规划方法,根据各个第一位置点的朝向权重和高度权重,在多个第一位置点中确定出多个第二候选位置点,从而确定出与任意一个目标路线点对应的最优位置点,以备后续生成候选路线。
14、在一种可选的实施方式中,判断各条候选路线是否满足预设坡长条件和预设坡度条件;当候选路线满足预设坡长条件、不满足预设坡度条件时,将候选路线的高度调整至预设的最大高度;当候选路线不满足预设坡长条件时,删除候选路线;和/或,检测各条候选路线是否满足预设道路铺设条件;当候选路线不满足预设道路铺设条件时,删除候选路线。
15、本发明实施例提供的路线规划方法,需要判断各条候选路线是否满足预设坡长条件和预设坡度条件,当确定候选路线满足预设坡长条件、不满足预设坡度条件时,对候选路线的高度进行调整。当确定候选路线不满足预设坡长条件时,将候选路线进行删除,从而有效避免最终生成的路线不符合公路的坡长要求和坡度要求。和/或需要检测各条候选路线是否满足预设道路铺设条件,当确定候选路线不满足预设道路铺设条件时,对候选路线进行删除,从而有效避免最终生成的路线不符合公路的道路铺设要求。
16、在一种可选的实施方式中,基于各条候选路线的铺设工程量,从多条候选路线中确定出目标路线,包括:对比各条候选路线对应的铺设工程量;将最小铺设工程量所对应的候选路线确定为目标路线。
17、本发明实施例提供的路线规划方法,通过对比各条候选路线对应的铺设工程量,将比较出的最小铺设工程量所对应的候选路线确定为最终的目标路线,从而能够从多条候选路线中选出成本最低的目标路线。
18、第二方面,本发明提供了一种路线规划装置,包括:获取模块,用于获取待生成道路所对应的起点位置和终点位置;第一生成模块,用于基于起点位置和终点位置之间的地理参数,生成初始路线;第二生成模块,用于基于初始路线中的各个路线点,生成多条候选路线;确定模块,用于基于各条候选路线的铺设工程量,从多条候选路线中确定出目标路线。
19、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的路线规划方法。
- 还没有人留言评论。精彩留言会获得点赞!