一种基于DEM的小尺度潮滩图像处理方法与流程
本发明涉及图像处理,具体涉及一种基于dem的小尺度潮滩图像处理方法。
背景技术:
1、潮滩处于陆地与海洋的交界,是研究海岸动态和环境变迁的参照物,潮滩又称为潮间带,潮间带介于低潮线和高潮线之间,由于潮间带高潮时被淹没,低潮时出露的特殊性,对于潮滩的提取及分类目前仍存在困难。现有提取潮间带的方法主要有两种方法:实地测量方法和基于潮位的推算方法,实地测量方法是利用测量仪器采集潮间带附近特征点,标记在数字地形图上并连接成潮间带,基于潮位的推算方法是对水位线进行潮位校正得到潮间带,是一种利用潮汐数据来推断和映射潮滩范围的技术。
2、上述两种潮间带的提取方法存在以下缺陷:
3、由于实地测量方法需要获取潮间带附近大量的特征点,因此必须进行大量野外工作,一是人工成本高,二是特征点的采集周期长,工作效率低;虽然基于潮位的推算方法的周期短且效率较高,但基于潮位的推算方法仅适用于规律的地形(即在面向不规律的地形使用时,容易导致推算误差大甚至出现错误),使用局限性大。
4、基于此,本发明提出一种基于dem的小尺度潮滩图像处理方法,提取水边线信息,并结合数据获取时刻的潮汐信息反演潮滩地形dem,对潮滩进行分类并量算面积,适用范围广,大大提高工作效率和测量精度,以解决现有方法存在的问题。
技术实现思路
1、本发明的目的是提供一种基于dem的小尺度潮滩图像处理方法,以解决背景技术中不足。
2、为了实现上述目的,本发明提供如下技术方案:一种基于dem的小尺度潮滩图像处理方法,所述处理方法包括以下步骤:
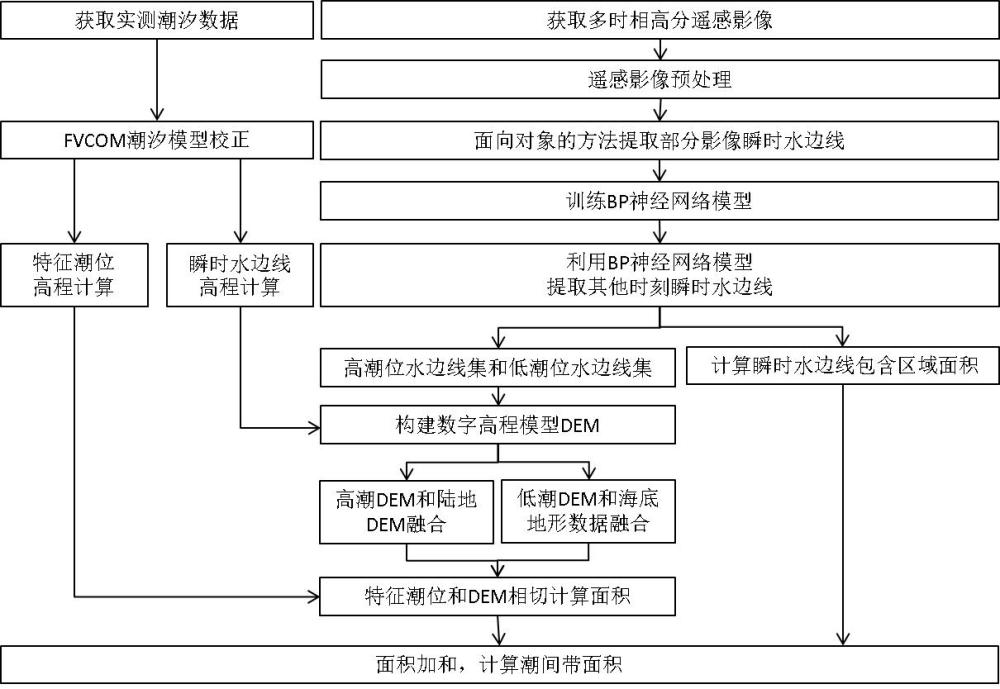
3、s1:系统端口从遥感卫星中获取潮滩多时相高分辨率的遥感影像数据、通过验潮站获取实测潮汐数据、通过合成孔径雷达获取陆地dem数据和基于多波束声纳实测海底地形数据;
4、s2:将获取的遥感影像数据导入envi软件,envi软件首先对遥感影像数据进行辐射定标,将遥感影像数据的像元灰度值转换成辐射亮度值,然后通过envi软件中的flash模块对影像进行大气校正,并将遥感影像数据的辐亮度值转变为潮滩地物的地表反射率,使处理后的遥感影像数据达到质量标准;
5、s3:将不同时期遥感影像数据分割成由同类特征像元组成的多个对象,忽略对象内部的纹理特性,并根据光谱、空间信息对多个对象进行处理后获取不同时期遥感影像数据的瞬时水边线;
6、s4:利用训练完成的水边线提取模型提取其他时刻遥感影像数据中的瞬时水边线信息,根据瞬时水边线的位置,划分高潮水边线集和低潮水边线集;
7、s5:将不同时期高潮线与低潮线之间的面积代入arcgis软件计算得到面积均值作为瞬时水边线区域面积;
8、s6:使用fvcom潮汐模型计算得到高潮高程平均值,融合高潮高程平均值和已有陆地dem模型获取高潮dem模型,将高潮dem模型与平均高潮高程面相切提取高潮线和平均高潮潮线之间的区域,导入arcgis软件计算得到高潮区面积;
9、s7:使用fvcom潮汐模型计算得到低潮高程平均值,融合低潮高程平均值和已有陆地dem模型获取低潮dem模型,将低潮dem模型与平均低潮高程面相切来提取低潮线和平均低潮潮线之间的区域,导入arcgis软件计算得到低潮区面积;
10、s8:arcgis软件将高潮区面积、瞬时水边线区域面积和低潮区面积相加得到潮间带区域面积。
11、在一个优选的实施方式中,步骤s5中,计算瞬时水边线区域面积包括以下步骤:
12、s5.1:将不同时期的高潮线和低潮线的矢量数据导入arcgis软件中;
13、s5.2:使用arcgis软件进行高潮线和低潮线之间的空间交集操作,生成新的图层,新的图层将包含高潮线与低潮线的重叠区域;
14、s5.3:对新生成的图层进行属性表的面积计算,在属性表中新建一个字段,使用calculate-geometry工具计算每个要素的面积;
15、s5.4:使用summary-statistics工具,对计算得到的面积字段进行统计计算面积均值,将面积均值输出为瞬时水边线区域面积。
16、在一个优选的实施方式中,步骤s6中,计算获取高潮区面积包括以下步骤:
17、s6.1:利用fvcom潮汐模型计算得到高潮期间的潮汐高程数据后,计算高潮高程平均值;
18、s6.2:将已有的陆地dem模型与计算得到的高潮高程平均值融合构建高潮dem模型;
19、s6.3:将高潮dem模型与平均高潮高程面相切,提取高潮区域;
20、s6.4:将提取的高潮区域数据转换为矢量数据后导入arcgis软件中,在arcgis软件中计算高潮区域的面积。
21、在一个优选的实施方式中,步骤s6.3中,将高潮dem模型与平均高潮高程面相切,提取高潮区域包括以下步骤:
22、s6.3.1:计算高潮dem模型中每个像元的高程值与高潮高程平均值的差值;
23、s6.3.2:定义高潮高程阈值,用于确定高潮区域,生成二值遮罩,二值遮罩大于高潮高程阈值的区域标记为高潮,二值遮罩小于等于高潮高程阈值的区域标记为非高潮,生成高潮区域遮罩;
24、s6.3.3:使用生成的高潮区域遮罩对矢量化后的区域提取高潮区域。
25、在一个优选的实施方式中,步骤s7中,计算低潮区域的面积包括以下步骤:
26、s7.1:利用fvcom潮汐模型计算得到低潮期间的潮汐高程数据后,计算低潮高程平均值;
27、s7.2:将已有的陆地dem模型与计算得到的低潮高程平均值融合构建低潮dem模型;
28、s7.3:将低潮dem模型与平均低潮高程面相切,提取低潮区域;
29、s7.4:将提取的低潮区域数据转变为矢量数据后导入arcgis软件中,在arcgis软件中计算低潮区域的面积。
30、在一个优选的实施方式中,步骤s7.3中,将低潮dem模型与平均低潮高程面相切,提取低潮区域包括以下步骤:
31、s7.3.1:计算低潮dem模型中每个像元的高程值与低潮高程平均值的差值;
32、s7.3.2:定义低潮高程阈值,用于确定低潮区域,生成二值遮罩,二值遮罩小于低潮高程阈值的区域标记为低潮,二值遮罩大于等于低潮高程阈值的区域标记为非低潮,生成低潮区域遮罩;
33、s7.3.3:使用生成的低潮区域遮罩对矢量化后的区域提取低潮区域。
34、在一个优选的实施方式中,所述高潮高程阈值的定义步骤为:
35、利用fvcom潮汐模型获取海岸区域,高潮期间的潮汐高程数据,建立高潮高程数据集,计算高潮高程数据集中的高潮高程平均值;
36、将高潮高程平均值作为基础高潮高程阈值,则动态高潮高程阈值,式中,为高潮高程平均值,,n为高潮高程数据集中的数据点数量,表示第i个数据点处的高潮高程值;
37、所述低潮高程阈值的定义步骤为:
38、利用fvcom潮汐模型获取海岸区域,低潮期间的潮汐高程数据,建立低潮高程数据集,计算低潮高程数据集中的低潮高程平均值;
39、将低潮高程平均值作为基础低潮高程阈值,则动态低潮高程阈值,式中,为低潮高程平均值,,m为低潮高程数据集中的数据点数量,表示第j个数据点处的低潮高程值。
40、在一个优选的实施方式中,步骤s4中,水边线提取模型的建立包括以下步骤:
41、s4.1:将剩余遥感影像数据整理为数据集,将数据集输入数据矩阵,并为每个样本提供相应的水边线标签;
42、s4.2:将数据集按照比例划分为训练组、验证组和测试组,数据集80%用于训练、10%用于验证、10%用于测试;
43、s4.3:使用深度学习框架构建bp神经网络模型,定义输入层、隐藏层和输出层的结构;
44、s4.4:依据预设的优化器和损失函数,使用训练组的数据对模型进行训练,同时使用验证组的数据验证bp神经网络模型性能,验证合格后输出水边线提取模型。
45、在一个优选的实施方式中,步骤s4中,划分高潮水边线集和低潮水边线集包括以下步骤:
46、s4.4:利用训练完成的水边线提取模型对其他时刻的遥感影像进行预测,得到瞬时水边线的位置信息;
47、s4.5:从验潮站实测潮汐数据中确定每个时刻的潮汐状态,包括潮汐水位高度或潮差信息了;
48、s4.6:确保潮汐数据的时间戳与遥感影像的时间戳对应,通过时间戳的匹配将潮汐数据与遥感影像的时间对应;
49、s4.7:判断每个时刻的潮汐状态,将实时潮汐与预设的潮汐阈值进行对比,实时潮汐大于等于潮汐阈值判定为高潮,实时潮汐小于潮汐阈值判定为低潮;
50、s4.8:根据潮汐状态,将瞬时水边线划分为高潮水边线集和低潮水边线集。
51、在一个优选的实施方式中,当处理后的遥感影像数据达不到质量标准时,需要对相应步骤进行重复处理,但在实际应用过程中,我们发现,若遥感影像数据在预处理过程中的重复步骤过多,可能会导致预处理后遥感影像数据在后续使用时出现局部失真或模糊等质量缺陷,由于此类缺陷较小,系统通常无法自主检测,若局部失真或迷糊的区域位于海岸线上,还会影响后续潮间带面积的准确度;
52、因此,为了使系统能够对这种微小缺陷进行感知,我们涉及以下方案:
53、获取遥感影像数据在辐射定标、大气校正中的重复处理次数,分别为两项处理步骤加权计算获取缺陷系数,表达式为:
54、,式中,为缺陷系数,为辐射定标重复处理次数,为大气校正重复处理次数,、分别为辐射定标重复处理次数与大气校正重复处理次数的权重。且;
55、由缺陷系数的计算表达式可知,缺陷系数越大,表明遥感影像受到重复处理后,出现微小缺陷的概率越大,因此,为了区域遥感影像存在/不存在微小缺陷,我们将计算获取的缺陷系数与缺陷阈值进行对比;
56、若缺陷系数大于缺陷阈值,分析遥感影像受到重复处理后,存在现微小缺陷,若缺陷系数小于等于缺陷阈值,分析遥感影像受到重复处理后,不存在现微小缺陷;
57、当分析遥感影像存在微小缺陷时,需要重新通过遥感卫星遥感影像数据,以保障遥感影像的使用质量;
58、若多次获取的遥感影像数据经过分析后均存在微小缺陷,则可能表明遥感卫星存在问题或当前环境对遥感卫星采集的遥感影像质量影响过大。
59、在一个优选的实施方式中,步骤s3中,获取不同时期遥感影像数据的瞬时水边线包括以下步骤:
60、s3.1:选择遥感影像数据,遥感影像数据选择时段之间具有时间间隔;
61、s3.2:使用图像分割算法将遥感影像划分为不同的对象,同一对象内的像元具有相关特征;
62、s3.3:选择像元中与瞬时水边线相关的特征,包括光谱特征、形状特征;
63、s3.4:基于像元的光谱值、形状特征通过支持向量机分类对象;
64、s3.5:基于形态学处理方法对分类结果进行优化,平滑边界或去除的错误分类;
65、s3.6:根据分类结果中瞬时水边线连接的像元,提取瞬时水边线的位置信息。
66、在上述技术方案中,本发明提供的技术效果和优点:
67、本发明利用遥感和地理信息系统工具对海岸带的水边线进行处理,实现潮滩分类和面积量算,通过遥感影像使用bp神经网络模型提取瞬时水边线,生成高潮水边线集和低潮水边线集,依据潮位数据给水边线赋值,将具有高程属性的在arcgis中生成dem,将潮间带划分为高潮区、瞬时水边线区和低潮区三个部分计算面积,三部分面积加和即为潮间带面积,潮滩处于陆地与海洋的交界,是研究海岸动态和环境变迁的参照物,提取水边线信息,并结合数据获取时刻的潮汐信息反演潮滩地形dem,对潮滩进行分类并量算面积,大大提高工作效率和测量精度,为相应海域的稳定治理、生态保护、资源开发及近岸工程建设等提供参考依据和资料基础。
- 还没有人留言评论。精彩留言会获得点赞!