一种基于水域的救援方法、装置、设备及存储介质与流程
本申请涉及救援领域,尤其涉及一种基于水域的救援方法、装置、设备及存储介质。
背景技术:
1、传统水下救援采用由持证且水下专业潜水作业经验丰富的专业潜水员携带水下相机、水下照明、潜水服、绳索、气瓶等专业潜水装备入水开展搜救作业,1次搜救任务至少需要6-7人协同配合,地面必须设置有专门的安全监督人员、信号员、救护人员与紧急救援设备等。
2、为了提高水下救援效率,相关研发人员研发了水下机器人进行救援,然而现有的水下机器人的侦测手段单一,通常只具有摄像机,基于图像分析确定救援目标的位置实施救援,当水体浑浊时,无法实施有效救援,救援效果差。
技术实现思路
1、本申请实施例提供一种基于水域的救援方法、装置、设备及存储介质,以解决相关技术存在的至少一个问题,技术方案如下:
2、第一方面,本申请实施例提供了一种基于水域的救援的方法,包括:
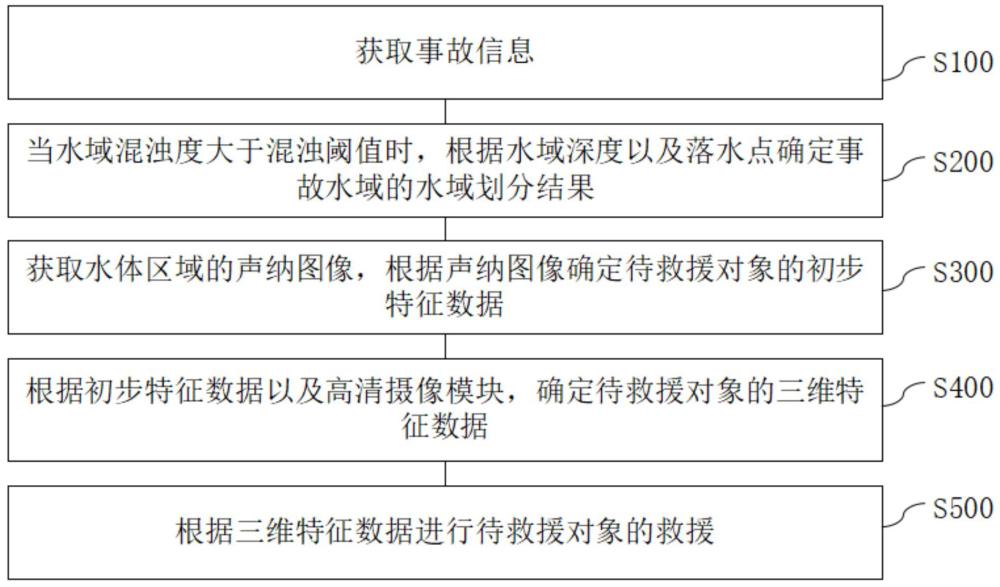
3、获取事故信息;所述事故信息包括事故水域的水域深度、所述事故水域的水域混浊度以及待救援对象的基本信息,所述基本信息包括落水点;
4、当所述水域混浊度大于混浊阈值时,根据所述水域深度以及所述落水点确定所述事故水域的水域划分结果,所述水域划分结果包括若干个水体区域;
5、获取所述水体区域的声呐图像,根据所述声呐图像确定所述待救援对象的初步特征数据;
6、根据所述初步特征数据以及高清摄像模块,确定所述待救援对象的三维特征数据;
7、根据所述三维特征数据进行所述待救援对象的救援。
8、在一种实施方式中,所述根据所述水域深度以及所述落水点确定所述事故水域的水域划分结果包括:
9、根据所述水域深度和预设深度,确定划分深度;
10、根据所述落水点以及预设长度,确定若干个平面;
11、根据所述划分深度以及若干个所述平面,确定若干个所述水体区域。
12、在一种实施方式中,所述获取所述水体区域的声呐图像,根据所述声呐图像确定所述待救援对象的初步特征数据包括:
13、依序在各个所述水体区域获取声呐图像;
14、将所述声呐图像输入至第一智能识别模型,确定所述待救援对象的初步特征数据;
15、其中,所述初步特征数据包括初始外形以及深度信息。
16、在一种实施方式中,所述根据所述初步特征数据以及高清摄像模块,确定所述待救援对象的三维特征数据包括:
17、根据所述初始外形以及所述深度信息,确定所述待救援对象的第一位置;
18、根据所述第一位置以及激光测距仪获取所述待救援对象的第二位置,控制高清摄像机到达所述第二位置获取目标图像,根据所述目标图像确定所述待救援对象的外形尺寸标注信息;
19、通过双目相机获取所述待救援对象的局部特征三维数据,根据所述外形尺寸标注信息以及所述局部特征三维数据确定三维特征数据。
20、在一种实施方式中,所述根据所述目标图像确定所述待救援对象的外形尺寸标注信息包括:
21、将所述目标图像输入至第二智能识别模型中,生成所述待救援对象的外形尺寸标注信息;
22、或者,
23、将所述目标图像输入至图像处理程序中,响应于标注指令,在所述目标图像上进行标注,得到所述待救援对象的外形尺寸标注信息。
24、在一种实施方式中,所述基本信息还包括基本外形尺寸信息,所述根据所述外形尺寸标注信息以及所述局部特征三维数据确定三维特征数据包括:
25、在所述外形尺寸标注信息符合所述基本外形尺寸信息的情况下,将所述局部特征三维数据进行拼接处理,生成表征所述待救援对象整体的三维特征数据。
26、在一种实施方式中,所述基本信息还包括整体特征信息和/或局部特征信息,所述根据所述三维特征数据进行所述待救援对象的救援包括:
27、确定所述三维特征数据与所述整体特征信息的第一相似度;
28、当所述第一相似度大于相似度阈值时,通过救援手段进行所述待救援对象的救援;
29、或者,
30、当所述第一相似度大于相似度阈值时,确定所述局部特征信息与所述局部特征信息的第二相似度,当所述第二相似度大于相似度阈值时,通过救援手段进行所述待救援对象的救援;
31、其中,所述通过救援手段进行所述待救援对象的救援包括通过水下机器人搭载的专用救援部件进行所述待救援对象的救援或者指示救援人员沿着水下机器人的复合电缆到达待救援对象附近进行所述待救援对象的救援。
32、第二方面,本申请实施例提供了一种基于水域的救援装置,包括:
33、获取模块,用于获取事故信息;所述事故信息包括事故水域的水域深度、所述事故水域的水域混浊度以及待救援对象的基本信息,所述基本信息包括落水点;
34、第一确定模块,用于当所述水域混浊度大于混浊阈值时,根据所述水域深度以及所述落水点确定所述事故水域的水域划分结果,所述水域划分结果包括若干个水体区域;
35、第二确定模块,用于获取所述水体区域的声呐图像,根据所述声呐图像确定所述待救援对象的初步特征数据;
36、第三确定模块,用于根据所述初步特征数据以及高清摄像模块,确定所述待救援对象的三维特征数据;
37、救援模块,用于根据所述三维特征数据进行所述待救援对象的救援。
38、第三方面,本申请实施例提供了一种电子设备,包括:处理器和存储器,该存储器中存储指令,该指令由该处理器加载并执行,以实现上述各方面任一种实施方式中的方法。
39、第四方面,本申请实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被执行时实现上述各方面任一种实施方式中的方法。
40、上述技术方案中的有益效果至少包括:
41、通过获取事故信息,当水域混浊度大于混浊阈值时,根据水域深度以及落水点确定事故水域的水域划分结果,水域划分结果包括若干个水体区域,获取水体区域的声呐图像,根据声呐图像确定待救援对象的初步特征数据,根据初步特征数据以及高清摄像模块,确定待救援对象的三维特征数据,对事故水域进行水域划分为若干个水体区域有利于在水域混浊时保证侦测的有效性、全面性以及效率;获取水体区域的声呐图像再利用高清摄像模块确定三维特征数据,逐步提高测量精度,在一定程度上降低处理负载并保证测量的最终准确度,从而最终保证救援效果。
42、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本申请进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种基于水域的救援方法,其特征在于,包括:
2.根据权利要求1所述基于水域的救援方法,其特征在于:所述根据所述水域深度以及所述落水点确定所述事故水域的水域划分结果包括:
3.根据权利要求1或2所述基于水域的救援方法,其特征在于:所述获取所述水体区域的声呐图像,根据所述声呐图像确定所述待救援对象的初步特征数据包括:
4.根据权利要求3所述基于水域的救援方法,其特征在于:所述根据所述初步特征数据以及高清摄像模块,确定所述待救援对象的三维特征数据包括:
5.根据权利要求4所述基于水域的救援方法,其特征在于:所述根据所述目标图像确定所述待救援对象的外形尺寸标注信息包括:
6.根据权利要求4所述基于水域的救援方法,其特征在于:所述基本信息还包括基本外形尺寸信息,所述根据所述外形尺寸标注信息以及所述局部特征三维数据确定三维特征数据包括:
7.根据权利要求6所述基于水域的救援方法,其特征在于:所述基本信息还包括整体特征信息和/或局部特征信息,所述根据所述三维特征数据进行所述待救援对象的救援包括:
8.一种基于水域的救援装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器和存储器,所述存储器中存储指令,所述指令由所述处理器加载并执行,以实现如权利要求1至7任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本申请提出一种基于水域的救援方法、装置、设备及存储介质,基于水域的救援方法通过获取事故信息,当水域混浊度大于混浊阈值时,根据水域深度以及落水点确定事故水域的水域划分结果,水域划分结果包括若干个水体区域,获取水体区域的声呐图像,根据声呐图像确定待救援对象的初步特征数据,根据初步特征数据以及高清摄像模块,确定待救援对象的三维特征数据,对事故水域进行水域划分为若干个水体区域有利于在水域混浊时保证侦测的有效性、全面性以及效率;获取水体区域的声呐图像再利用高清摄像模块确定三维特征数据,逐步提高测量精度,在一定程度上降低处理负载并保证测量的最终准确度,从而最终保证救援的效果。
技术研发人员:张志春,赵远飞,镡志伟,王玉珍,郭铁铮,陈巍,陈国军,夏细明,刘奇
受保护的技术使用者:广东省安全生产科学技术研究院
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!