一种基于道路纹理数据识别的自动驾驶控制方法及装置与流程
本发明涉及智能驾驶,具体为一种基于道路纹理数据识别的自动驾驶控制方法及装置。
背景技术:
1、自动驾驶汽车又称无人驾驶汽车,是一种通过电脑系统实现无人驾驶的智能汽车。现有的自动驾驶在一定程度上会出现识别障碍物错误,造成车祸,不能百分百的保证自动驾驶系统识别不出错。在实践中发现,自动驾驶车辆需要依靠传感器去辨别障碍物,控制车辆前进、制动、变向,而道路上的不定因素较多,数据庞大,部分障碍物不能识别,有可能对自动驾驶安全运行造成影响,严重情况下会造成车祸,即现有的自动驾驶均是对影响行驶障碍因素进行判别,通过排除干扰因素进行自动驾驶,并非对行驶道路的百分百识别判断,即现有的自动驾驶是排除“非”,而不是确定“是”,因此,无论算法和传感器升级和迭代都不能做到百分百的安全,本发明旨在通过对道路微观分析得出道路的安全区域,做“是”的判断,再执行前进指令,能够进一步提高自动驾驶的安全性,给现有的自动驾驶增加一层安全防护。
2、基于此,本发明设计了一种基于道路纹理数据识别的自动驾驶控制方法及装置,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于道路纹理数据识别的自动驾驶控制方法及装置,以解决上述背景技术中提出现有的自动驾驶均是对影响行驶障碍因素进行判别,通过排除干扰因素进行自动驾驶,并非对行驶道路的百分百识别判断,即现有的自动驾驶是排除“非”,而不是确定“是”,因此,无论算法和传感器升级和迭代都不能做到百分百的安全,本发明旨在通过对道路微观分析得出道路的安全区域,做“是”的判断,再执行前进指令,能够进一步提高自动驾驶的安全性,给现有的自动驾驶增加一层安全防护的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于道路纹理数据识别的自动驾驶控制方法,包括:
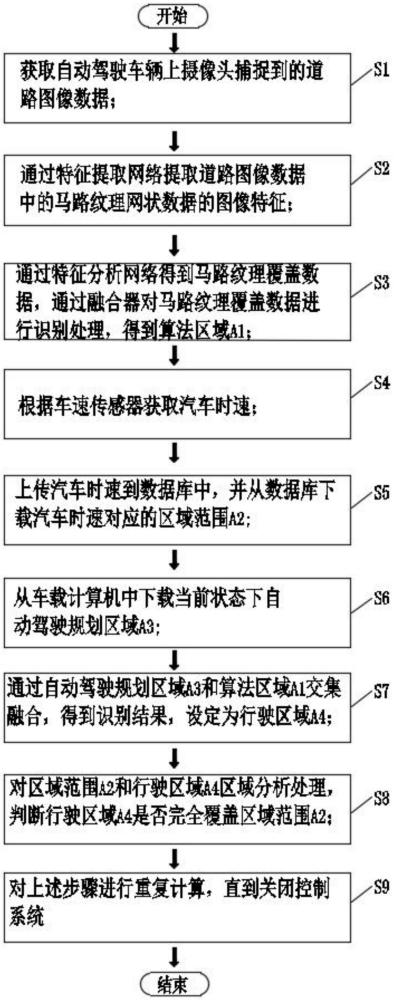
3、s1、获取自动驾驶车辆上摄像头捕捉到的道路图像数据;
4、s2、通过预先构建的道路纹理图像特征提取网络提取道路图像数据中的道路纹理网状数据的图像特征
5、s3、根据预先构建的特征分析网络对所述道路纹理网状数据的图像特征进行处理,得到道路纹理覆盖数据,并根据预先构建的融合器对所述道路纹理覆盖数据进行识别处理,得到识别结果为算法区域a1。
6、s4、根据车速传感器获取汽车时速,
7、s5、将所述汽车时速上传至预先构建的数据库中,从所述数据库下载所述汽车时速对应的区域范围a2;
8、s6、从车载计算机中下载当前状态下自动驾驶规划区域a3;
9、s7、通过特征融合网络模型将自动驾驶规划区域a3和算法区域a1进行交集融合,得到识别结果,设定为行驶区域a4;
10、s8、对从数据库下载所述的区域范围a2和识别得出所述的行驶区域a4进行区域分析处理,判断判断行驶区域a4是否完全覆盖区域范围a2;
11、s9、对上述步骤进行重复计算,直到关闭控制系统。
12、对从数据库下载所述的区域范围a2和识别得出所述的行驶区域a4进行区域分析处理,判断行驶区域a4是否完全覆盖区域范围a2之后,所述方法还包括:
13、s801、若判断为行驶区域a4完全覆盖区域范围a2,保持原始时速行驶,若判断为行驶区域a4否完全覆盖区域范围a2,发送信号给车载计算机,由车载计算机发送主动制动信号,并重新规划汽车运行路线。
14、所述方法还包括:
15、s01、构建初始图像特征提取网络和初始图像区域候选网络,并获取用于训练所述初始图像特征提取网络和所述初始图像区域候选网络的图像训练数据;其中,所述训练数据包括路面现场图片以及现场实际数据;
16、s02、通过所述初始图像区域候选网络和所述初始图像特征提取网络对所述路面现场图片进行处理,通过边界轮廓处理得到道路纹理网状数据的图像特征;
17、s03、根据所述路面现场实际数据和所述道路纹理网状数据的图像特征,通过梯度下降算法调整所述初始图像区域候选网络和所述初始图像特征提取网络的网络模型参数,得到最终的图像特征提取网络和最终的图像区域候选网络。
18、通过特征融合网络模型将自动驾驶规划区域a3和算法区域a1进行交集融合,得到识别结果,设定为行驶区域a4之前,所述方法还包括:
19、s61、构建特征融合网络模型,并获取用于训练所述初始特征融合网络和所述实际行驶区域数据;
20、s62、通过所述初始特征融合网络对所述自动驾驶规划区域和所述算法区域进行交集融合,得到训练融合数据;
21、s63、根据所述融合数据和所述实际行驶区域数据,通过梯度下降算法调整所述初始特征融合网络网络模型参数,得到最终的特征融合网络。
22、将所述汽车时速上传至预先构建的数据库中,从所述数据库下载所述汽车时速对应的区域范围a2之前,所述方法还包括:
23、s401、预先构建数据库,数据库包含汽车时速和所述汽车时速模拟状态下的所需安全区域范围。
24、一种应用基于道路纹理数据识别的自动驾驶控制方法的车辆自动驾驶装置,其特征在于,包括:
25、获取模块,获取自动驾驶车辆上摄像头捕捉到的道路图像数据;
26、特征提取模块,用于通过预先构建的道路纹理图像特征提取网络提取道路图像数据中的道路纹理网状数据的图像特征;
27、特征分析模块,用于对道路纹理网状数据处理,得到道路纹理覆盖数据;
28、融合模块,用于根据预先构建的特征融合网络模型对所述自动驾驶规划区域a3和算法区域a1进行交集融合,得到融合处理数据;
29、控制模块,用于根据所述识别结果对所述自动驾驶车辆进行自动驾驶控制;
30、所述控制模块包括:
31、判断子模块,用于所述区域范围a2和所述的行驶区域a4进行区域分析处理,判断判断行驶区域a4是否完全覆盖区域范围a2;
32、数据库模块,用于储存数汽车时速和所述汽车时速模拟状态下的所需安全区域范围,接受计算机信号,上传和下载数据;
33、车载计算机,用于根据所述新的行驶路线对所述自动驾驶车辆进行自动驾驶控制,用于与数据库之间的信号传输;用于与判断子模块之间的信号传输。
34、一种计算机设备,包括存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述计算机设备执行权利要求1至5中任一项所述的车辆自动驾驶方法。
35、优选的,其存储有所述的计算机设备中所使用的所述计算机程序。
36、与现有技术相比,本发明的有益效果是:系统通过从自动驾驶车辆上的视觉传感器上获取前方的道路图像数据,通过道路纹理图像特征提取网络对道路图像数据进行处理,通过对获取到的高清道路图像进行微观分析,获取道路中沥青石子的轮廓轨迹,对所得沥青石子的轮廓轨迹进行汇总,最终得到道路纹理网状图形,通过特征分析网络对道路纹理网状图形进行分析,得到道路纹理所覆盖的区域,即为道路纹理覆盖数据,通过融合器对道路纹理覆盖数据进行在处理和存储,得到的识别结果为算法区域a1,该算法区域a1位视觉传感器上所能识别到的道路;
37、获取汽车时速后,上传到数据库中,并下载当前时速对应的区域范围a2,区域范围a2位当前时速下的最小制动范围,从车载计算机中下载当前状态写的自动驾驶规划区域a3,通过特征融合网络模型将自动驾驶规划区域a3和算法区域a1进行交集融合,即识别自动驾驶规划区域a3和算法区域a1共同的区域范围,设定为行驶区域a4,即当前时速和路线下,行驶区域a4为自动驾驶汽车安全驾驶的安全范围;
38、通过道路纹理图像特征提取网络模型和特征融合网络模型的建立,通过训练数据重复对道路纹理图像特征提取网络模型和特征融合网络模型的训练过程,提升道路纹理图像特征提取网络模型和特征融合网络模型判断正确率。
39、对从数据库下载所述的区域范围a2和识别得出所述的行驶区域a4进行区域分析处理,判断行驶区域a4是否完全覆盖区域范围a2;判断为行驶区域a4完全覆盖区域范围a2,保持原始时速行驶,若判断为行驶区域a4否完全覆盖区域范围a2,发送信号给车载计算机,由车载计算机发送主动制动信号,并重新规划汽车运行路线;
40、当系统不能识别道路轮廓时或者重复运算多次控制方法,均不能获取前进路线时,自动驾驶汽车自动关闭该功能,并提醒驾驶员,同时降低自动驾驶行驶安全等级;
41、本发明实现了通过微观的道路沥青石子的轮廓分析,分析前方道路覆盖区域,通过与自动驾驶路线和交集处理,得到可识别的可行驶的道路安全区域,通过与当前最小的制动范围进行比较,分析当前状态下是否可以继续前行,确保当前时速下的自动驾驶安全状态,进一步提高自动驾驶的安全性,给现有的自动驾驶增加一层安全防护,也可对现有的自动驾驶增加一种驾驶模式,即:能够全部识别前方道路安全状态下,进行自动驾驶模式的安全前行,能够进一步提高自动驾驶的安全性,给现有的自动驾驶增加一层安全防护的问题。
- 还没有人留言评论。精彩留言会获得点赞!