一种被动端合作靶标识别方法
本发明涉及空间合作目标跟踪及交汇对接领域,具体地,涉及一种被动端合作靶标识别方法。
背景技术:
1、在早期,合作目标的识别并不依赖于靶标,而是主要通过人员观察和计算,或者依靠地面测控站进行监测来实现对目标的识别和跟踪。然而,这种方法的效率低下,容易受到主观因素的影响,导致识别精度较低。因此,早期对合作目标识别的研究并不成熟。
2、随着卫星、空间站等航天器的持续发展,各国已逐渐意识到目标识别对于空间交会对接、空间站建立及目标抓取等技术的重要性。合作靶标的识别提供了目标相对于探测器的姿态信息,为其他各项任务奠定了基础。因此,多国都已在此领域开展研究。合作靶标识别是目标识别的一种方法,主要通过计算机视觉和图像处理等技术分析相机或激光雷达等返回的图像数据,实现合作目标的自动化识别和跟踪。
3、相较于其他方法,空间合作靶标识别具有以下显著优势:
4、1.精度较高:由于靶标在合作目标坐标系下的三维坐标已知,因此在特征点匹配成功的情况下,其精度相对较高。
5、2.可靠性较强:空间合作靶标识别在大多数光照和环境条件下均具有较高的稳定性和准确性。
6、3.灵活性良好:如果合作目标的形状和尺寸合适,可以根据实际需求更改并重新布置空间合作靶标。
7、4.成本较低:与其他识别方法相比,空间合作靶标识别无需使用高成本、高占地的硬件,如激光雷达,因此所需的硬件和设备成本较低,且易于部署和维护。
8、然而,在空间合作靶标识别过程中,图像中特征点的匹配可能会出现不准确的情况,导致位姿解算出现错误,从而产生较大的操作误差。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种被动端合作靶标识别方法,能够实现对合作目标位姿的快速估计,并能取得较高的精度。
2、根据本发明的一个方面,提供一种被动端合作靶标识别方法,包括:
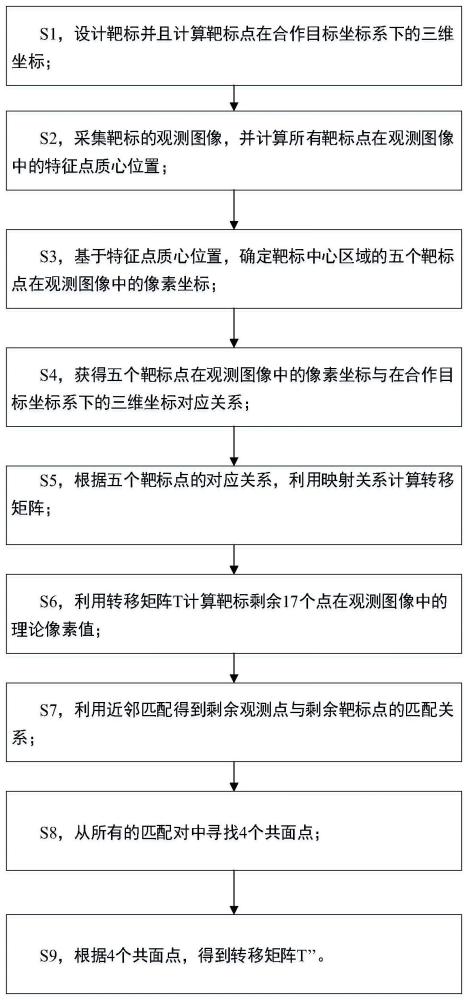
3、设计靶标并且计算靶标点在合作目标坐标系下的三维坐标;
4、采集靶标的观测图像,并计算所述观测图像中特征点质心位置;
5、基于所述特征点质心位置,确定靶标中心区域的五个靶标点在所述观测图像中的像素坐标;
6、找到所述五个靶标点在所述观测图像中的像素坐标与在合作目标坐标系下的三维坐标匹配关系;
7、根据五个靶标点的所述匹配关系,利用映射关系计算转移矩阵t;
8、利用所述转移矩阵t计算靶标剩余十七靶标点在观测图像中的理论像素值;
9、利用近邻匹配得到观测图像的剩余观测点与剩余靶标点的匹配关系;
10、从所有的匹配对中寻找四个共面点;
11、根据四个共面点,得到转移矩阵t”。
12、优选地,所述设计靶标,包括:
13、在靶标设计22个圆点作为靶标点,由内而外分为三圈分布,
14、内圈索引为1、2、3、4、5,该五个点连线构成一个凸五边形;
15、中圈索引为6,7,8,9,10,11,该6个点构成一个正六边形;
16、外圈索引为12,13,14,15,16,17,18,19,20,21,22,该11个靶标点是从正十二边形中选取的;
17、所述22个圆点,内圈与外圈的点共面,外圈的点在其共面内形成的二维点的最大行列距相同。
18、优选地,采集靶标的观测图像,并计算所述观测图像中特征点质心位置,包括:
19、使用雷达拍摄所述靶标,获得观测图像;
20、根据雷达测量的垂直于雷达平面方向的距离信息对所述观测图像选取某一矩形窗口区域,并在窗口区域内遍历所有像素点;
21、当某一像素点亮度大于阈值时被标记为可能的靶标点,并对当前像素点作连通域算法,找到所有与该点联通并且超过阈值的点,以xy轴方向的灰度加权值作为所述观测图像中所有靶标点的质心坐标。
22、优选地,所述基于所述特征点质心位置,确定靶标中心区域的五个靶标点在所述观测图像中的像素坐标,包括:
23、计算所有特征点的最大行列距linemax,以及colmax,如果|linemax-colmax<5并且观测图像中提取到的特征点数小于等于22,则为情况一,否则为情况二;
24、在情况一中,获得五个靶标点在所述观测图像中的像素坐标的过程,包括:
25、判断观测图像中所有靶标点的质心位置即为靶标中心,直接选取最大行列距对应的矩形框的中心点为靶标中心;
26、计算所有特征点离该中心点的距离,并选取离中心点最近的五个点;
27、计算五个点的像素均值,再计算像素均值到五个点的向量的反正切值并对其进行排序;
28、根据特征:反正切值的角度从-x轴开始逆时针方向由小变大,依次穿过第三、第四、第一和第二象限,将排序后的点按照逆时针排序,经过排序的五个点的相邻点位置关系与靶标内圈五个点相同;
29、在情况二中,获得五个靶标点在所述观测图像中的像素坐标的过程,包括:
30、判断观测图像中所有靶标点的质心位置非靶标中心,计算所有靶标点的xy轴坐标均值,并选取离该坐标均值最近的12个特征点,默认靶标中心的五个点在这12个点中;
31、在这个12个特征点中循环遍直至找到一组满足两个特征条件的5点组合;
32、所述两个特征条件分别为:
33、特征一,计算五个点行列对应的最大最小值,得到一个矩形范围,如果其他特征点均不在这个矩形范围内,则认为这5点组合内不存在其他点;
34、特征二,计算五个点像素均值,再计算像素均值到五个点的向量的反正切值并对其进行排序,依次计算五个点中相邻三点的弧度并根据范围[1.33,2.3]来筛选。
35、优选地,所述找到所述五个靶标点在所述观测图像中的像素坐标与在合作目标坐标系下的三维坐标匹配关系,包括:
36、获得合作目标坐标系下的内圈5点的角度关系为,∠123,∠234,∠345,∠451,∠512;
37、计算观测图像中的五个点的角度关系;
38、基于两组所述角度关进行匹配,得到5点组合的匹配关系。
39、优选地,所述根据五个靶标点的匹配关系,利用映射关系计算转移矩阵t,包括:
40、设定靶标内圈5点的三维坐标对应的矩阵为p1∈r3×5;
41、设定观测图像内圈的像素坐标对应的矩阵为p2∈r3×5,则映射矩阵t的计算公式为:
42、
43、其中-1表示矩阵的逆,t表示转置。
44、优选地,所述利用转移矩阵t计算靶标剩余十七靶标点在观测图像中的理论像素值,包括:
45、对于任一靶标点p′∈r3×1,其在当前观测图像上的映射p”表示为:
46、p’‘=tp’,p”∈r3×1。
47、优选地,所述利用近邻匹配得到观测图像中剩余观测点与剩余靶标点的匹配关系,包括:
48、定义情形,特征点数小于等于22为情形一,否则为情形二;
49、在情形一中,认为当前视场涵盖了所有22个靶标点,对于剩余的十七靶标点,离每个点的理论像素点最近的特征点即为匹配点;
50、在情形二中,不能确定是否涵盖了所有靶标点,对于剩余的十七靶标点,离每个点的理论像素点最近的特征点并且最近距离少于10个像素坐标的点即为匹配点,不满足则当前靶标点匹配失败。
51、优选地,所述从所有的匹配对中寻找四个共面点,包括:
52、筛选出与22个靶标点的所有共面点的交集;
53、遍历所述交集中所有特征点,对每个特征点,计算其与交集其他点的距离和;
54、选择最大距离和对应的特征点作为共面点1,并以共面点1为基础,在交集中选择三个与共面点1最远的点作为剩下的三个共面点。
55、优选地,所述根据四个共面点,得到转移矩阵t”,包括:
56、使用4点共面算法计算转移矩阵t’;
57、并转移矩阵t’以为初值,以所有匹配点的二维、三维像素坐标为输入,利用束约束算法迭代优化,最终得到转移矩阵t”。
58、与现有技术相比,本发明实施例至少具有如下的一种有益效果:
59、本发明实施例中的被动端合作靶标识别方法,具有较高的位姿精度:采取了两段式位姿解算流程,第一段目的是匹配内圈的五个点,找到初始姿态,第二段根据得到初始姿态匹配剩余的靶标点,增加匹配对数,进而保证了位姿精度。
60、本发明实施例中的被动端合作靶标识别方法,具有较低误匹配率:22个点的内中外式分布使得内五个点的特征差异较大,并采用了角度关系获取匹配关系,降低了出现误匹配的概率。
- 还没有人留言评论。精彩留言会获得点赞!