护栏检测方法、装置、电子设备和存储介质与流程
本公开涉及自动驾驶环境感知,尤其涉及一种护栏检测方法、装置、电子设备和存储介质。
背景技术:
1、现有的护栏检测方案主要分为三种:第一种是依赖激光点云聚类及相关过滤算法的传统检测方式;第二种是依赖深度学习,海量数据训练模型的检测方式;最后一种是传统算法与深度学习相结合的检测方式。
2、利用激光点云数据聚类进行传统目标检测是一种基于点的信息进行比较的方法,由于用到了所有的点数据,故该方法的缺点之一是速度慢;其二是点云形成的数量依赖雷达的线数,线数越高意味着雷达价格越贵;其三是各种聚类算法中护栏的形成条件及过滤条件很难满足现实存在中各样的护栏形状,会导致很多目标边缘被误检成护栏,且护栏被遮挡的情况下很可能被漏检。
3、利用深度学习的检测方案弊端也很明显,其一是路线选择的各种方案各有优缺;其中利用相机检测护栏极大的依赖良好的天气状况,且在多种情况下,相机显示的护栏与车道线具有相似的特征,故图片检测可能会将车道线误检成护栏;其二是利用深度学习涉及到大量的数据标注,在极大的成本之下依旧无法完全解决护栏漏检误检的问题,且模型难以在短期内快速叠代更新。
4、利用传统算法与深度学习相结合的检测方案,也会存在护栏漏检误检的问题。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种护栏检测方法、装置、电子设备和存储介质,。
2、第一方面,本公开实施例提供了一种护栏检测方法,该方法包括:
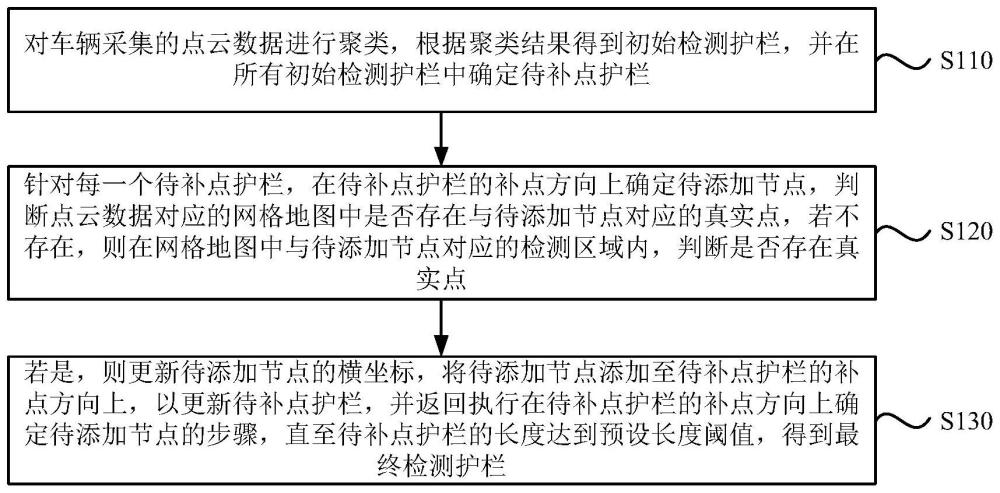
3、对车辆采集的点云数据进行聚类,根据聚类结果得到初始检测护栏,并在所有初始检测护栏中确定待补点护栏;
4、针对每一个待补点护栏,在所述待补点护栏的补点方向上确定待添加节点,判断所述点云数据对应的网格地图中是否存在与所述待添加节点对应的真实点,若不存在,则在所述网格地图中与所述待添加节点对应的检测区域内,判断是否存在真实点;
5、若是,则更新所述待添加节点的横坐标,将所述待添加节点添加至所述待补点护栏的补点方向上,以更新所述待补点护栏,并返回执行在所述待补点护栏的补点方向上确定待添加节点的步骤,直至所述待补点护栏的长度达到预设长度阈值,得到最终检测护栏。
6、第二方面,本公开实施例还提供了一种护栏检测装置,该装置包括:
7、补点护栏确定模块,用于对车辆采集的点云数据进行聚类,根据聚类结果得到初始检测护栏,并在所有初始检测护栏中确定待补点护栏;
8、节点判断模块,用于针对每一个待补点护栏,在所述待补点护栏的补点方向上确定待添加节点,判断所述点云数据对应的网格地图中是否存在与所述待添加节点对应的真实点,若不存在,则在所述网格地图中与所述待添加节点对应的检测区域内,判断是否存在真实点;
9、节点添加模块,用于若是,则更新所述待添加节点的横坐标,将所述待添加节点添加至所述待补点护栏的补点方向上,以更新所述待补点护栏,并返回执行在所述待补点护栏的补点方向上确定待添加节点的步骤,直至所述待补点护栏的长度达到预设长度阈值,得到最终检测护栏。
10、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的护栏检测方法。
11、第四方面,本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上所述的护栏检测方法。
12、本公开实施例提供的一种护栏检测方法,通过对车辆采集的点云数据进行聚类得到初始检测护栏,并从中确定待补点护栏,针对每一个待补点护栏,在其补点方向上确定待添加节点,判断点云数据对应的网格地图中是否存在与待添加节点对应的真实点,若不存在,则在网格地图中与待添加节点对应的检测区域内判断是否存在真实点,若是,则更新待添加节点的横坐标,并将待添加节点添加至待补点护栏的补点方向上,以更新待补点护栏,并返回执行在补点方向上确定待添加节点的步骤,直至待补点护栏的长度达到预设长度阈值,得到最终检测护栏,实现了对护栏是否贴边的检测以及对不贴边护栏的校正,可以解决聚类的护栏不贴边以及护栏延长线上不存在点的问题,降低采用直线拟合护栏带来的检测误差,提高护栏检测准确率的同时,尽量避免出现护栏误检的情况,有效减少因护栏上不存在真实点导致的车辆无法自动驾驶进而被迫人工接管车辆的次数。
技术特征:
1.一种护栏检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述更新所述待添加节点的横坐标,包括:
3.根据权利要求1所述的方法,其特征在于,所述在所有初始检测护栏中确定待补点护栏,包括:
4.根据权利要求1所述的方法,其特征在于,在所述根据聚类结果得到初始检测护栏之后,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述判断所述初始检测护栏中的每一个护栏段是否有效,包括:
6.根据权利要求5所述的方法,其特征在于,所述判断所述初始检测护栏中的每一个护栏段是否有效,还包括:
7.根据权利要求1所述的方法,其特征在于,所述对车辆采集的点云数据进行聚类,根据聚类结果得到初始检测护栏,包括:
8.一种护栏检测装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本公开实施例公开了一种护栏检测方法、装置、电子设备和存储介质,该方法通过对车辆采集的点云数据进行聚类得到初始检测护栏,并从中确定待补点护栏,针对每一个待补点护栏,在其补点方向上确定待添加节点,判断点云数据对应的网格地图中是否存在与待添加节点对应的真实点,若不存在,则在网格地图中与待添加节点对应的检测区域内判断是否存在真实点,若是,则更新待添加节点的横坐标,并将待添加节点添加至待补点护栏的补点方向上,以更新待补点护栏,并循环此步骤直至待补点护栏的长度达到预设长度阈值,得到最终检测护栏,实现了对护栏是否贴边的检测以及对不贴边护栏的校正,可以提高护栏检测准确率,尽量避免出现护栏误检的情况。
技术研发人员:彭靖玥,张丹
受保护的技术使用者:驭势科技(北京)有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!