基于图像分析高强阻燃转弯输送带缺陷检测方法与流程
本发明涉及图像分割检测,具体涉及一种基于图像分析高强阻燃转弯输送带缺陷检测方法。
背景技术:
1、在一些工业场所中,如存在可燃性物质的煤矿和化工厂,由于传统的输送带可能因静电、摩擦或其他原因而容易引发火灾,因此运输材料所采用的输送带一般为高阻燃输送带。高阻燃输送带是采用防火材料制造而成,能够有效降低火灾的风险,保护工作人员和设备的安全。在材料传输过程中,当需要改变材料的传输方向时,通常会将高阻燃输送带设置成可转弯型。由于高阻燃转弯输送带的外侧弯道受到的拉力比较大,使得输送带更容易产生裂纹等缺陷,从而影响其使用,因此需要定期对高阻燃转弯输送带进行裂纹缺陷检测。
2、传统输送带的裂纹缺陷检测通常由人工实现,随着计算机视觉技术的快速发展,基于图像识别的缺陷检测技术被逐渐应用于输送带裂纹检测中。其中,在进行输送带的裂纹检测时,通过获取输送带的表面图像,并对该表面图像进行识别,从而确定输送带是否存在裂纹缺陷。但是,由于高阻燃输送带本身纹理容易与裂纹混淆,容易将纹理区域误判为裂纹区域,从而影响高阻燃输送带缺陷检测的准确性。
技术实现思路
1、本发明的目的在于提供一种基于图像分析高强阻燃转弯输送带缺陷检测方法,用于解决现有转弯输送带裂纹缺陷检测的准确性较低的问题。
2、为解决上述技术问题,本发明提供了一种基于图像分析高强阻燃转弯输送带缺陷检测方法,包括以下步骤:
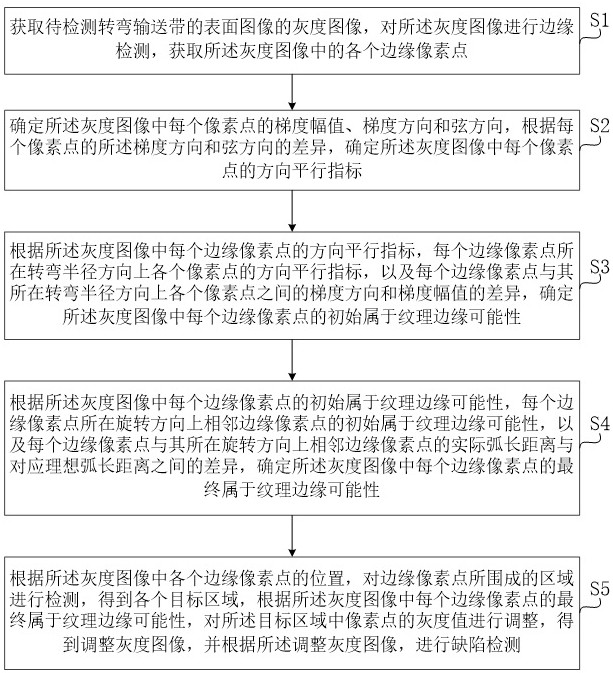
3、获取待检测转弯输送带的表面图像的灰度图像,对所述灰度图像进行边缘检测,获取所述灰度图像中的各个边缘像素点;
4、确定所述灰度图像中每个像素点的梯度幅值、梯度方向和弦方向,根据每个像素点的所述梯度方向和弦方向的差异,确定所述灰度图像中每个像素点的方向平行指标;
5、根据所述灰度图像中每个边缘像素点的方向平行指标,每个边缘像素点所在转弯半径方向上各个像素点的方向平行指标,以及每个边缘像素点与其所在转弯半径方向上各个像素点之间的梯度方向和梯度幅值的差异,确定所述灰度图像中每个边缘像素点的初始属于纹理边缘可能性;
6、根据所述灰度图像中每个边缘像素点的初始属于纹理边缘可能性,每个边缘像素点所在旋转方向上相邻边缘像素点的初始属于纹理边缘可能性,以及每个边缘像素点与其所在旋转方向上相邻边缘像素点的实际弧长距离与对应理想弧长距离之间的差异,确定所述灰度图像中每个边缘像素点的最终属于纹理边缘可能性;
7、根据所述灰度图像中各个边缘像素点的位置,对边缘像素点所围成的区域进行检测,得到各个目标区域,根据所述灰度图像中每个边缘像素点的最终属于纹理边缘可能性,对所述目标区域中像素点的灰度值进行调整,得到调整灰度图像,并根据所述调整灰度图像,进行缺陷检测。
8、进一步的,确定所述灰度图像中每个边缘像素点的初始属于纹理边缘可能性,对应的计算公式为:
9、;其中,表示所述灰度图像中第i个边缘像素点的初始属于纹理边缘可能性;表示所述灰度图像中第i个边缘像素点的方向平行指标;表示所述灰度图像中第i个边缘像素点的所在转弯半径方向上第v个像素点的方向平行指标;表示所述灰度图像中第i个边缘像素点与其所在转弯半径方向上第v个像素点之间的梯度方向的差值绝对值;表示所述灰度图像中第i个边缘像素点与其所在转弯半径方向上第v个像素点之间的梯度幅值的差值绝对值;表示所述灰度图像中第i个边缘像素点所在转弯半径方向上各个像素点的总数目;表示第一参数;表示第二参数;表示归一化函数。
10、进一步的,确定所述灰度图像中每个边缘像素点的最终属于纹理边缘可能性,对应的计算公式为:
11、;其中,表示所述灰度图像中第i个边缘像素点的最终属于纹理边缘可能性;表示所述灰度图像中第i个边缘像素点的初始属于纹理边缘可能性;表示所述灰度图像中第i个边缘像素点所在旋转方向上最相邻的边缘像素点的初始属于纹理边缘可能性;表示所述灰度图像中第i个边缘像素点与其所在旋转方向上相邻边缘像素点的理想弧长距离;表示所述灰度图像中第i个边缘像素点与其所在旋转方向上最相邻的边缘像素点的实际弧长距离;| |表示取绝对值符号;表示第三参数。
12、进一步的,对所述目标区域中像素点的灰度值进行调整,得到调整灰度图像,包括:
13、调低所述灰度图像中每个边缘像素点的灰度值,且每个边缘像素点的最终属于纹理边缘可能性与该边缘像素点的灰度值的调低幅度成负相关关系,每个边缘像素点的灰度值与该边缘像素点的灰度值的调低幅度成正相关关系;
14、所述灰度图像中所有边缘像素点的灰度值调低完成后,根据所述目标区域中各个边缘像素点的调低后的灰度值,对所述目标区域中的非边缘像素点的灰度值进行调整,得到调整灰度图像。
15、进一步的,调低所述灰度图像中每个边缘像素点的灰度值,对应的计算公式为:
16、;其中,表示所述灰度图像中第i个边缘像素点的调低后的灰度值;表示所述灰度图像中第i个边缘像素点的调低前的灰度值;表示所述灰度图像中第i个边缘像素点的最终属于纹理边缘可能性;表示归一化函数。
17、进一步的,对所述目标区域中的非边缘像素点的灰度值进行调整,得到调整灰度图像,包括:
18、确定所述目标区域中每个非边缘像素点的宽度直线与该目标区域的边缘像素点的交点,所述宽度直线为过每个非边缘像素点的且与所述目标区域的主成分方向垂直的直线,并计算所有交点对应的调低后的灰灰度值的平均值,得到所述目标区域中每个非边缘像素点对应的灰度均值;
19、利用所述目标区域中每个非边缘像素点对应的灰度均值,对所述目标区域中每个非边缘像素点的灰度值进行更新,从而得到调整灰度图像。
20、进一步的,确定所述灰度图像中每个像素点的方向平行指标,包括:
21、确定所述灰度图像中每个像素点的所述梯度方向对应的角度和弦方向对应的角度的差值绝对值,对所述差值绝对值进行负相关映射,并将负相关映射结果确定为所述灰度图像中每个像素点的方向平行指标。
22、进一步的,进行负相关映射对应的计算公式为:
23、;其中,表示所述灰度图像中第i个像素点的负相关映射结果;表示所述灰度图像中第i个像素点的所述梯度方向对应的角度;表示所述灰度图像中第i个像素点的弦方向对应的角度;表示调整参数;| |表示取绝对值符号。
24、进一步的,确定所述灰度图像中每个像素点的弦方向,包括:
25、将所述灰度图像中每个像素点作为目标像素点,确定所述灰度图像中目标像素点到所述灰度图像中输送带内边缘线的最短距离,并确定所述最短距离的距离连线与所述灰度图像中输送带内边缘线的交点,得到第一交点;
26、以所述灰度图像中目标像素点对应的第一交点为中心,在所述灰度图像中输送带内边缘线上对称截取弧段,得到第一弧段,并将根据所述第一弧段所确定的圆形的圆心作为内圆心;
27、确定所述灰度图像中目标像素点对应的第一弧段在第一交点位置处的切线的垂直方向与所述灰度图像中输送带外边缘线的交点,得到第二交点;
28、以所述灰度图像中目标像素点对应的第二交点为中心,在所述灰度图像中输送带外边缘线上对称截取弧段,得到第二弧段,并将根据所述第二弧段所确定的圆形的圆心作为外圆心;
29、获取所述灰度图像中目标像素点对应的内圆心和外圆心的中心位置,以所述中心位置为圆心确定圆形,得到目标圆形,所述目标圆形过对应的目标像素点;
30、确定所述灰度图像中每个像素点对应的目标圆形在该像素点处的切线方向,并根据所述切线方向确定所述灰度图像中每个像素点的弦方向。
31、进一步的,进行缺陷检测,包括:
32、利用大津算法对所述调整灰度图像进行阈值分割,得到二值分割图像,并根据所述二值分割图像,确定是否存在缺陷区域。
33、本发明具有如下有益效果:本发明通过获取转弯输送带的表面图像的灰度图像,并确定灰度图像中的各个边缘像素点。这些边缘像素点可能属于裂纹缺陷边缘,也可能属于输送带本身纹理边缘。根据转弯输送带表面纹理沿着转弯半径方向分布的特点,纹理边缘的梯度方向通常与弦方向即转动方向平行,而其他像素点则没有这种特点,因此根据每个像素点的梯度方向和弦方向的差异,对每个像素点的梯度方向和弦方向一致性情况进行衡量,确定每个像素点的方向平行指标。结合纹理边缘上沿着转弯半径方向上各个像素点的梯度方向和弦方向一致性较好,且各个像素点之间的梯度方向和梯度幅值相差较小,因此可以确定灰度图像中每个边缘像素点的初始属于纹理边缘可能性,以对纹理边缘进行初步筛选。由于输送带表面纹理区域之间的间隔是符合一定规律的,而裂纹区域是随机出现的,因此结合每个边缘像素点及其所在旋转方向上相邻边缘像素点的初始属于纹理边缘可能性,并将每个边缘像素点与其所在旋转方向上相邻边缘像素点的实际弧长距离与对应的理想弧长距离进行比较,对边缘像素点属于纹理边缘的可能性进行最终的准确衡量,从而得到每个边缘像素点的最终属于纹理边缘可能性。基于该最终属于纹理边缘可能性,对灰度图像中边缘像素点所围成的目标区域中的像素点灰度进行调整,以对纹理区域和裂纹区域进行区分,最终得到调整灰度图像,并基于该调整灰度图像,实现输送带表面缺陷检测。由于本发明通过对转弯输送带表面的纹理边缘像素点进行准确识别,并对灰度图像中的边缘像素点所围成的目标区域进行灰度调整,以对纹理区域和裂纹区域进行区分,从而降低了输送带本身纹理区域对裂纹缺陷识别的影响,有效提高了输送带表面裂纹缺陷检测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!