曲面物体的轮廓度测量方法、系统、电子设备及介质与流程
本技术涉及轮廓度检测,具体涉及一种曲面物体的轮廓度测量方法、系统、电子设备及介质。
背景技术:
1、随着智能手机的技术不断进步,摄像头的性能已成为消费者在选择手机时考虑的重要因素之一。特别是近年来,随着移动摄影技术的飞速发展,手机曲面物体的精度和质量对整体设备性能的影响越来越大。其中,vcm是曲面物体中的关键组件。在曲面物体中,vcm的轮廓度是一个重要的参数,影响着对焦的精确度和图像质量。轮廓度可以描述vcm的形状和尺寸的精确度,这对于保证镜头对焦的稳定性和准确性至关重要。
2、目前,现有轮廓度测量方法常采用机械测量工具,例如卡尺、测微器和高度计等直接测量,或根据光学测量方法,如干涉仪、激光扫描仪等进行测量。但是在实际应用中,由于曲面物体的产品结构复杂所测量的尺寸在不同的表面,现有简单的机械测量或通过光学测量方法测量,得到的测量结果较为片面,导致轮廓度测量准确性低。
技术实现思路
1、本技术提供了一种曲面物体的轮廓度测量方法、系统、电子设备及介质,具有准确测量曲面物体的轮廓度的效果。
2、第一方面,本技术提供了一种曲面物体的轮廓度测量方法,包括:
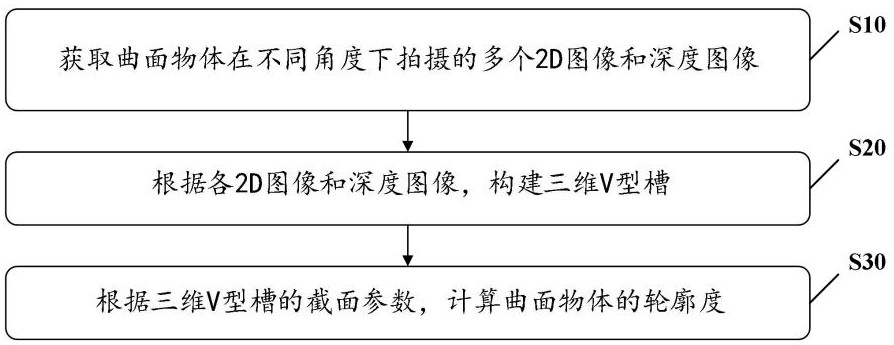
3、获取曲面物体在不同角度下拍摄的多个2d图像和深度图像;
4、根据各所述2d图像和所述深度图像,构建三维v型槽;
5、根据所述三维v型槽的截面参数,计算所述曲面物体的轮廓度。
6、通过采用上述技术方案,运用多视角拍摄获得包含丰富图像信息的多个2d图像及其对应的深度图像。深度图像提供了额外的三维结构数据。利用这些多角度的图像作为输入,可以构建出高精度的三维v型槽模型,使模型充分反映实物的三维几何特征。在构建出三维模型后,可以直接在模型上进行精确的尺寸测量与参数计算。三维模型包含了组件的完整三维信息,相比单视角的二维图像,可以显著提高后续分析计算的准确性。特别是在计算诸如v型槽的轮廓度这样的参数时,直接在三维模型上测量计算可以避免二维近似带来的误差。通过该方案获得的三维v型槽模型,使得后续基于模型的参数计算和质量检测达到很高的精度。运用三维模型进行检测可以直接反映组件的实际三维几何结构,相比传统二维图像分析提高了测量的准确性。该方案综合利用了多视角图像信息与三维重构技术,实现了对关键参数轮廓度的精确测量。
7、可选的,确定各所述2d图像中相同位置的二维特征点;将所述深度图像中对应于各特征点位置的深度信息附加至各所述二维特征点中,得到三维特征点;根据各所述二维特征点和各所述三维特征点构建所述三维v型槽。
8、通过采用上述技术方案,提取出共同的二维特征点,这些特征点表示了同一物体上固有的关键信息。然后根据特征点在2d图像上的位置,从对应视角的深度图像中获取每个特征点的深度值。将二维特征点与其深度值结合,就得到了三维空间中的特征点。由于这些特征点代表了同一实物体的固定信息,因此不同视角下的三维特征点可以一一对应起来。基于多组对应特征点,可以采用三维重建算法精确计算出三维点云,并在点云上构建出物体的三维模型。该方案充分利用了图像特征点的匹配信息,与深度数据相结合构建三维模型。运用特征匹配可以提高多视角三维重建的效果。且特征点包含了物体关键信息,可以使重建出的三维模型更准确反映实物体的细节几何结构。
9、可选的,根据所述二维特征点确定所述三维v型槽的形状、大小以及位置;根据所述三维特征点确定所述三维v型槽的深度以及斜度;根据所述形状、所述大小、所述位置、所述深度以及所述斜度,构建所述三维v型槽。
10、通过采用上述技术方案,二维特征点包含了图像平面上v槽的形状、大小、位置信息,决定了v槽在三维场景下的整体外形。三维特征点则提供了深度和斜面细节,丰富了三维结构信息。二维特征点确定了三维v槽的整体轮廓,三维特征点补充了三维细节。既确定了v槽的位置姿态,又建模出了丰富的三维几何结构。通过合理运用二维和三维特征点信息,该技术方案实现了对复杂三维v型槽结构的精确建模。相较于仅用二维信息建模,该方案充分利用了特征点的二三维数据,使得重构结果更加精细和准确,达到了构建高精度三维模型的效果。
11、可选的,确定所述三维v型槽中的目标截面,根据所述目标截面以及所述三维v型槽的顶部平面,确定多个三维点云数据;根据各所述三维点云数据,计算所述曲面物体的轮廓度。
12、通过采用上述技术方案,在构建好的三维v型槽模型上,首先识别出目标测量截面和顶部参考平面,这两者在三维模型上可以明确定位。针对目标截面和顶平面进行三维点云的采样,获取包含丰富三维结构信息的点云数据。基于三维模型采集点云的优势在于,点云直接反映了组件的三维几何特征,提供了精确和可靠的结构化数据,为后续的关键参数计算奠定了基础。在获得点云数据支持的情况下,可以避免二维图像分析带来的近似误差,直接在三维模型上进行高精度的测量与计算,大大提升参数结果的准确度。该方案中应用三维点云数据,通过对点云进行分析处理,有效实现了v型槽轮廓度等参数的精确计算。三维点云的引入显著提高了质量检测与参数计算的精度,达到了高效准确测量的效果。
13、可选的,在所述三维v型槽的末端以顶部平面为基准,构建空间坐标系,并从所述空间坐标系中确定所述目标截面;计算所述目标截面上各截面点至所述顶部平面的距离,根据各截面点的位置以及所述距离,构建所述三维点云数据。
14、通过采用上述技术方案,在三维v型槽模型的末端确立统一的空间坐标系,以顶部平面为基准进行定位,这样可以准确规范地选取目标测量截面。在获确定目标截面后,计算每个截面点到顶平面参考面的距离,以获得点云的精确三维坐标信息。计算距离可以直接反映三维几何结构,避免二维成像带来的近似误差。通过计算距离构建的点云集合包含了丰富而准确的三维结构数据。在后续使用该点云数据集进行参数计算时,其中的三维结构信息可以大幅提高测量与计算的准确度。因此该方案中,运用坐标系确定截面及计算距离获取点云的处理,相比直接采集点云可使重建结果更加精细和准确,为质量检测提供了可靠的三维数据支持,达到了提高测量精度的效果。
15、可选的,获取所述三维v型槽中所述目标截面的第一标准直线和第二标准直线;根据所述三维点云数据和所述第一标准直线的位置,确定各所述截面点至所述位置的第一距离;根据所述三维点云数据和所述第二标准直线的位置,确定各所述截面点至所述位置的第二距离;根据各所述第一距离和各所述第二距离,确定所述轮廓度。
16、通过采用上述技术方案,获取设计图纸中的标准槽形对应截面的两条标准直线,这两条标准直线表示了理想的槽形轮廓。在已经采集获得的三维点云数据上,分别计算每个点到两条标准直线的距离。计算距离的方式可以避免二维图像测量带来的近似误差,直接在三维结构上进行精确测量。通过分析点云到标准直线的距离分布,可以评估实际加工质量,并求取最大最小距离差值计算出最终的轮廓度参数。该方案中,运用三维点云数据与标准轮廓直线进行距离计算,相较于二维图像分析,可以获得更加准确和可靠的轮廓度结果。点云数据提供了精确的三维结构信息,是实现高精度轮廓度测量的关键。因此,该可选技术方案通过距离计算实现了基于实际三维结构的轮廓度准确测定。
17、可选的,获取对所述曲面物体执行扫描操作反馈的点云数据;根据所述点云数据,生成所述深度图像。
18、通过采用上述技术方案,执行扫描操作采集获得目标物体的三维点云数据,点云数据包含了丰富的三维结构信息。基于获得的点云,进行二维投影与深度值编码,以生成对应物体的深度图像。点云本身包含精确的三维结构细节,可直接为图像像素提供准确的深度值。相较于直接的深度摄像,利用点云数据生成深度图像可以减少图像噪声,获得清晰度更高的结果。这样得到的高质量深度图像继承了点云的三维结构优势,可为后续的三维建模与参数计算提供可靠的图像支持。该方案通过合理利用点云数据生成高精度深度图像,达到了获得清晰准确深度信息以提升图像支持质量的效果。
19、在本技术的第二方面提供了一种曲面物体的轮廓度测量系统。
20、图像获取模块,用于获取曲面物体在不同角度下拍摄的多个2d图像和深度图像;
21、图像处理模块,用于根据各所述2d图像和所述深度图像,构建三维v型槽;
22、轮廓度计算模块,用于根据所述三维v型槽的截面参数,计算所述曲面物体的轮廓度。
23、在本技术的第三方面提供了一种电子设备。
24、一种曲面物体的轮廓度测量系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现一种曲面物体的轮廓度测量方法。
25、在本技术的第四方面提供了一种计算机可读存储介质。
26、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现一种曲面物体的轮廓度测量方法。
27、综上所述,本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
28、1、本技术通过运用多视角拍摄获得包含丰富图像信息的多个2d图像及其对应的深度图像。深度图像提供了额外的三维结构数据。利用这些多角度的图像作为输入,可以构建出高精度的三维v型槽模型,使模型充分反映实物的三维几何特征。在构建出三维模型后,可以直接在模型上进行精确的尺寸测量与参数计算。三维模型包含了组件的完整三维信息,相比单视角的二维图像,可以显著提高后续分析计算的准确性。特别是在计算诸如v型槽的轮廓度这样的参数时,直接在三维模型上测量计算可以避免二维近似带来的误差。通过该方案获得的三维v型槽模型,使得后续基于模型的参数计算和质量检测达到很高的精度。运用三维模型进行检测可以直接反映组件的实际三维几何结构,相比传统二维图像分析提高了测量的准确性。该方案综合利用了多视角图像信息与三维重构技术,实现了对关键参数轮廓度的精确测量。
29、2、本技术通过提取出共同的二维特征点,这些特征点表示了同一物体上固有的关键信息。然后根据特征点在2d图像上的位置,从对应视角的深度图像中获取每个特征点的深度值。将二维特征点与其深度值结合,就得到了三维空间中的特征点。由于这些特征点代表了同一实物体的固定信息,因此不同视角下的三维特征点可以一一对应起来。基于多组对应特征点,可以采用三维重建算法精确计算出三维点云,并在点云上构建出物体的三维模型。该方案充分利用了图像特征点的匹配信息,与深度数据相结合构建三维模型。运用特征匹配可以提高多视角三维重建的效果。且特征点包含了物体关键信息,可以使重建出的三维模型更准确反映实物体的细节几何结构。
30、3、本技术通过获取设计图纸中的标准槽形对应截面的两条标准直线,这两条标准直线表示了理想的槽形轮廓。在已经采集获得的三维点云数据上,分别计算每个点到两条标准直线的距离。计算距离的方式可以避免二维图像测量带来的近似误差,直接在三维结构上进行精确测量。通过分析点云到标准直线的距离分布,可以评估实际加工质量,并求取最大最小距离差值计算出最终的轮廓度参数。该方案中,运用三维点云数据与标准轮廓直线进行距离计算,相较于二维图像分析,可以获得更加准确和可靠的轮廓度结果。点云数据提供了精确的三维结构信息,是实现高精度轮廓度测量的关键。因此,该可选技术方案通过距离计算实现了基于实际三维结构的轮廓度准确测定。
- 还没有人留言评论。精彩留言会获得点赞!