一种用于虚拟现实的人体全方向运动机及其使用方法与流程
本发明涉及人体运动控制,具体为一种用于虚拟现实的人体全方向运动机及其使用方法。
背景技术:
1、基于虚拟现实vr的运动捕捉技术正普遍应用于3d动画、电影制作,其一般用全身光点感应原理提高设备采集人体动态、肌肉纹理的分辨率。这样的技术方案需要较大的场地,设备造价也非常昂贵。vr在人们生活工作娱乐中的推广引用,需要紧凑的场地和技术工艺成熟的运动采集设备。
2、当前消费娱乐市场上,已有厂商推出类似传统跑步机的履带式万向运动设备,但因为眩晕感导致体验感非差。也有厂商推出了凹型滑动采集器,通过特殊的鞋子在凹面滑动时产生电感应信号,计算机通过分析分析电信号位置大小来判断移动方向和速度,但这种方式与人体真实的行走感觉差异很大,体验感也不佳,最重要的是成本高。
3、所以vr万向运动机的技术发展要能在大众消费群体推广,需要能够接近人体在真实路面环境的行走或跑步感觉,同时设备采集和模拟人体运动信息的装置设备不能太复杂。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于虚拟现实的人体全方向运动机及其使用方法,可以用于虚拟现实技术中,让人体在设备上原地模拟各种走路、跑步、转身等动作,同步将这些动作采集进入数字设备分析,在数字设备显示器中渲染出人体的三维动作。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于虚拟现实的人体全方向运动机,包括:
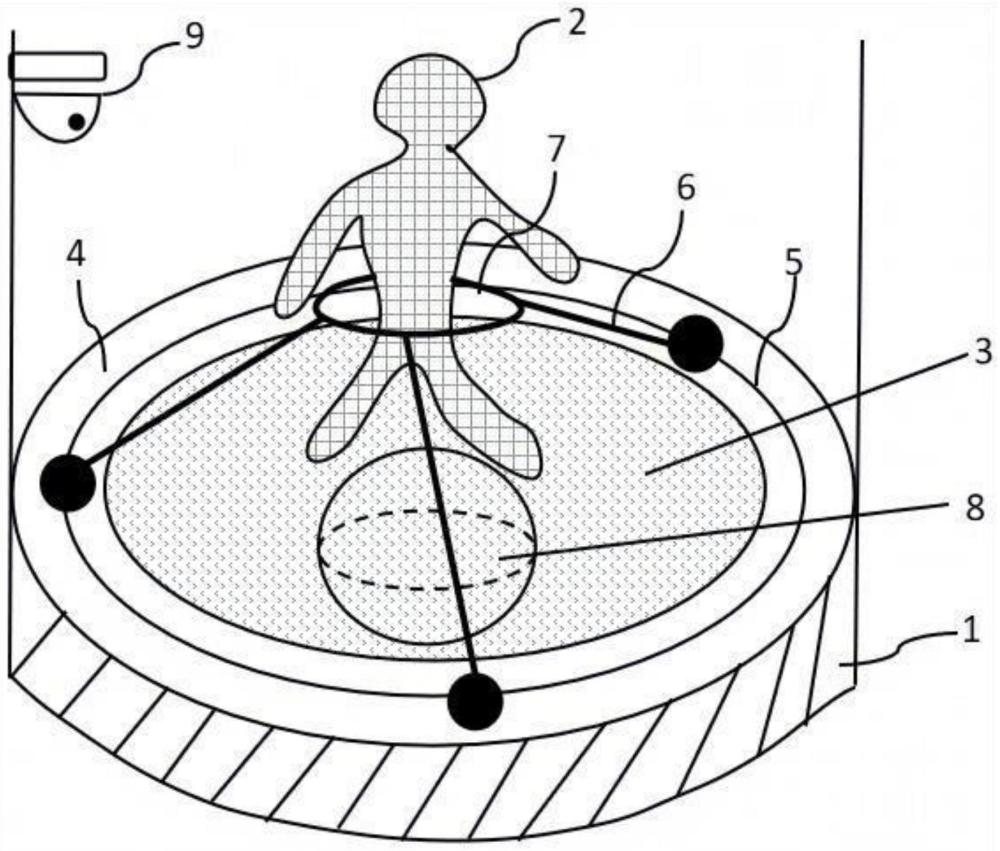
3、支撑系统,所述支撑系统包括底座和支撑平台,所述支撑平台设置在底座中部;
4、旋转辅助系统,所述旋转辅助系统包括滑槽,所述滑槽设置在底座和支撑平台之间,所述滑槽内设置有滑环,所述滑环通过多个支撑杆连接有固定腰带,所述固定腰带套设在人体上;
5、旋转采集系统,用于采集人体通过旋转辅助系统在支撑平台上转动的方向、速度和角度。
6、优选的,所述旋转采集系统包括滑环带,所述滑环带固定在滑环下侧,所述滑环带环体上等分设置有多个光栅格,所述滑槽外侧壁固定连接有两个光源,两个所述光源间距为半个光栅格距离,所述滑槽内侧壁与光源对应设置有光电感应板,两个光源会在光电感应板上感应出高低脉冲电平信号。脉冲信号的高电平间隔时间反应了滑环转动的速度,脉冲信号的脉冲数量反应了滑环相对转动的角度,而间隔半个栅格的脉冲信号反应了滑环转动方向。这样就可以通过数字信号采集分析计算出人体转动的方向、速度和角度。
7、优选的,所述支撑系统还包括运动辅助机构,所述运动辅助机构包括倾斜器,所述倾斜器上端固定连接有支撑平台,所述支撑平台呈倒立锥状,所述倒立锥尖端与倾斜器相连。
8、优选的,所述倒立锥内部设置有多个球体轮,所述球体轮内部固定连接有陀螺仪,所述倒立锥内部设置有球体移动检测仪,所述球体轮底部设置有多个用于支撑的瓦式轴承。
9、优选的,还包括四肢运动捕捉系统,所述四肢运动捕捉系统包括摄像头和多个感光贴,多个所述感光贴为不同颜色的感光材料,多个所述感光贴分别贴在人体关节处。
10、本发明还提供应用于上述运动机的使用方法,包括以下步骤:
11、s1、人体站立在支撑平台上;
12、s2、通过多个支撑杆连接的固定腰带将人体腰部进行支撑;
13、s3、人体在支撑平台上进行走路、跑步、转身动作;
14、s4、通过设置的旋转采集系统对人体转动的方向、速度和角度进行采集,并上传;
15、s5、通过运动辅助机构中倾斜器、设置在球体轮内部的陀螺仪以及设置的球体移动检测仪对人体在支撑平台的支撑平面上运动的速度和移动距离进行采集并上传;
16、s6、根据上传的数据在数字设备显示器中渲染出人体的三维动作。
17、工作原理:人体站在支撑平台上,通过多个支撑杆连接的固定腰带将人体进行支撑,使人体感受到平衡,同时可以站在支撑平台上随意°转身,且在转身时,通过支撑杆带动滑环旋转,滑环带动滑环带旋转,进而通过设置的旋转采集系统根据滑环带的旋转进行人体转动方向、速度和角度的采集,具体的,光源发出的光,透过栅格打在滑环内壁的光电感应镜片上。当滑环在旋转时,两个光源会在镜片上感应出脉冲感应电平信号,脉冲信号的高电平间隔时间反应了滑环转动的速度,脉冲信号的脉冲数量反应了滑环相对转动的角度,而间隔半个栅格的脉冲信号反应了滑环转动方向。这样就可以通过数字信号采集分析计算出人体转动的方向、速度和角度;同时人体在运动过程中,设置在倒立锥内的球体受到鞋底的摩擦从而滚动,则系统会根据加速度的大小积分计算人体x/y支撑平面运动的速度和移动距离,同时根据矢量方向合成最终平面移动的方向;且配置摄像头以及贴在人体重要关节上的不同颜色的感光材料,实现对人体四肢动作的捕捉,最后同步将这些动作采集进入数字设备分析,在数字设备显示器中渲染出人体的三维动作。
18、本发明提供了一种用于虚拟现实的人体全方向运动机及其使用方法。具备以下有益效果:
19、本发明提供的全方向运动机可以让人体在设备上原地模拟各种走路、跑步、转身等动作,同步将这些动作采集进入数字设备分析,在数字设备显示器中渲染出人体的三维动作。
技术特征:
1.一种用于虚拟现实的人体全方向运动机,其特征在于,包括:
2.根据权利要求1所述的一种用于虚拟现实的人体全方向运动机,其特征在于,所述旋转采集系统包括滑环带(10),所述滑环带(10)固定在滑环(5)下侧,所述滑环带(10)环体上等分设置有多个光栅格(11),所述滑槽(4)外侧壁固定连接有两个光源(12),两个所述光源(12)间距为半个光栅格(11)距离,所述滑槽(4)内侧壁与光源(12)对应设置有光电感应板(13)。
3.根据权利要求1所述的一种用于虚拟现实的人体全方向运动机,其特征在于,所述支撑系统还包括运动辅助机构,所述运动辅助机构包括倾斜器(18),所述倾斜器(18)上端固定连接有支撑平台(3),所述支撑平台(3)呈倒立锥(17)状,所述倒立锥(17)尖端与倾斜器(18)相连。
4.根据权利要求3所述的一种用于虚拟现实的人体全方向运动机,其特征在于,所述倒立锥(17)内部设置有多个球体轮,所述球体轮内部固定连接有陀螺仪(16),所述倒立锥(17)内部设置有球体移动检测仪(8),所述球体轮底部设置有多个用于支撑的瓦式轴承(15)。
5.根据权利要求1所述的一种用于虚拟现实的人体全方向运动机,其特征在于,还包括四肢运动捕捉系统,所述四肢运动捕捉系统包括摄像头(9)和多个感光贴,多个所述感光贴为不同颜色的感光材料,多个所述感光贴分别贴在人体(2)关节处。
6.一种使用方法,应用于如权利要求1-5任一项所述的一种用于虚拟现实的人体全方向运动机,其特征在于,包括以下步骤:
技术总结
本发明提供一种用于虚拟现实的人体全方向运动机及其使用方法,涉及人体运动控制领域。该用于虚拟现实的人体全方向运动机及其使用方法,包括支撑系统,所述支撑系统包括底座和支撑平台,所述支撑平台设置在底座中部,旋转辅助系统,所述旋转辅助系统包括滑槽,所述滑槽设置在底座和支撑平台之间,所述滑槽内设置有滑环,所述滑环通过多个支撑杆连接有固定腰带,所述固定腰带套设在人体上,旋转采集系统,用于采集人体通过旋转辅助系统在支撑平台上转动的方向、速度和角度。本发明可以让人体在设备上原地模拟各种走路、跑步、转身等动作,同步将这些动作采集进入数字设备分析,在数字设备显示器中渲染出人体的三维动作。
技术研发人员:张玉芳
受保护的技术使用者:苏州思瑞格电子科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!