一种基于图对比自监督学习的异常局部轨迹检测方法和装置
本发明涉及城市移动数据分析领域,尤其涉及一种基于图对比自监督学习的异常局部轨迹检测方法和装置。
背景技术:
1、移动设备和传感器技术的普及导致大量轨迹数据的快速生成。分析这些数据对于挖掘城市动态信息至关重要,而轨迹挖掘是智能交通的关键技术。它可以发现有价值的模式,为城市交通规划和网络控制提供必要的保障。一些异常车辆轨迹可能包含欺诈行为或交通事故信息。发现异常轨迹有助于提前预警和决策,及时消除安全隐患。这在现实生活场景中具有重要意义。我们将异常轨迹定义为:在同一起始点和终点中的所有行程中,与大多数轨迹有显着偏差的轨迹。从大量轨迹数据中检测异常轨迹并分析其形成的潜在原因正成为一个重要问题。司机通常选择在他们整个行程的一部分中驾驶非常规路径,而现有方法多将检测视角聚焦于全局视角,这就导致了常规方法难以检测到这些局部异常驾驶行为。对于司机而言,有时的偏航行为可能是因为道路维修或是道路拥堵导致的,通过对局部轨迹异常的检测,可通过与历史道路流量或事件的对比分析,来判断司机的偏航行为是否合理。同时异常局部轨迹的检测有利于提高完整轨迹的异常检测准确率。
2、路网数据是城市研究中最常用的地理数据,通常通过图的方式呈现。图中节点表示交叉路口,边表示路段,连接两个节点。然而出租车轨迹数据的庞大和复杂造成从这些数据中挖掘信息并不容易,而自监督学习旨在从无监督数据中学习神经模型,而不使用手动标注的标签。图对比自监督学习广泛应用于图异常检测任务,作为正负样本对比任务的设计,使模型能够学习正常节点的潜在模式,从而能够从出租车轨迹数据中检测出异常局部轨迹。
3、本方法采用了城市出租车轨迹数据,路网数据,旨在大量轨迹数据中检测出局部异常轨迹。
技术实现思路
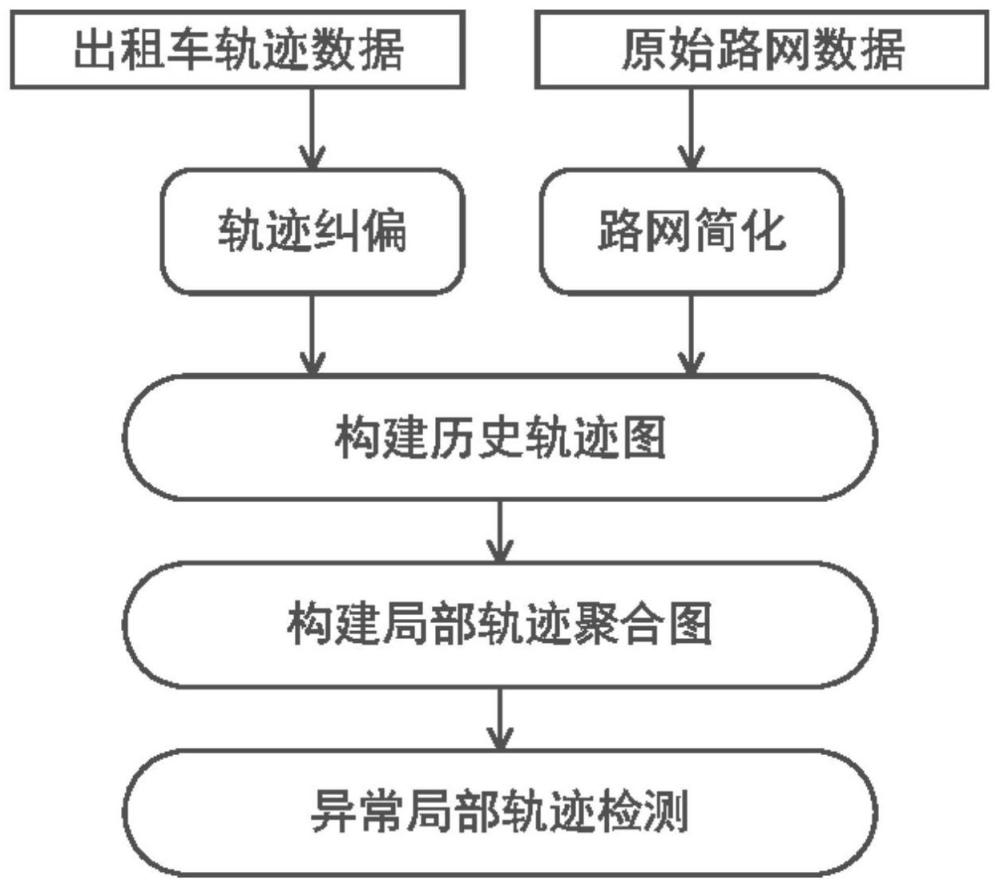
1、本发明的目的主要针对现有方法的不足之处,提出一种基于图对比自监督学习的异常局部轨迹检测方法和装置。本发明通过将纠偏后的历史轨迹投影至简化路网中,得到轨迹数据的新表示;随后计算各路段的特征值,得到历史轨迹图;随后将轨迹进行划分融合,得到局部轨迹,得到局部轨迹融合图。最终通过对比学习模块检测出异常局部轨迹。
2、本发明是通过以下技术方案达到上述目的:一种基于图对比自监督学习的异常局部轨迹检测方法,包括如下步骤:
3、s1:对原始轨迹数据进行预处理;
4、s2:对路网数据进行简化处理;
5、s3:对s1所述的原始轨迹数据和s2所述的路网数据通过地图匹配算法进行投影融合,得到轨迹数据的新表示,然后生成历史轨迹图;
6、s4:对s3所述的历史轨迹图数据通过局部轨迹融合算法得到局部轨迹,然后生成局部轨迹融合图;
7、s5:对s4所述的局部轨迹融合图数据通过生成模块和对比学习模块检测异常局部轨迹;
8、s6:可视化异常局部轨迹结果。其中s1具体包括步骤如下:
9、对出租车历史轨迹数据的清洗,包括清除缺失值、重复值、偏移值、噪声数据。
10、其中s2具体包括步骤如下:
11、s2.1:下载地图:获取实际路网数据,以及路网数据的规范化处理;
12、s2.2:生成缓冲区:根据实际路网生成缓冲区;
13、s2.3:简化路网:根据生成缓冲区的中心线,并删除一些未连接的分支来简化路网。
14、其中s3具体包括步骤如下:
15、s3.1:轨迹投影匹配:根据地图匹配算法,将每条轨迹投影匹配至路网上,得到轨迹数据的新表示,每条轨迹由若干路网路段组成;
16、s3.2:计算每条路段的历史访问次数,使用符号表示历史路段hti的历史访问次数;
17、s3.3:计算每条路段的方向角度,使用符号表示历史路段hti的方向角度;
18、s3.4:计算每条路段的历史访问密度,使用符号表示历史路段hti的历史访问密度,计算公式如下所示:
19、
20、其中,将以路段i为圆心,半径为r的范围内的路段作为路段hti的邻居集合neii,vj代表neii中的一个路段;
21、s3.5:生成历史轨迹图,定义历史轨迹图ght=(vht,eht,xht),其中为路段集合,n代表了路段数量;为各路段的连接关系,其中如果和存在连接,则xht为合并后的特征向量。
22、其中s4具体包括步骤如下:
23、s4.1:局部轨迹融合:将每条轨迹相交产生的交点为断点,将轨迹划分为局部轨迹,使得每条轨迹都可以用局部轨迹表示,具体公式如下:
24、
25、其中,fg代表需要学习的确定性非线性函数,为每个历史路段的属性,hi是将第i步的输出作为值的隐藏状态;
26、s4.2:生成局部轨迹融合图,定义局部轨迹融合图g=(v,e,x),其中v为局部轨迹集,e为它们的连接关系,x为s4.1第m步输出hm,作为各节点v∈v的特征。
27、其中s5具体包括步骤如下:
28、s5.1:子图采样,构建实例对样本池:对s4.1中得到的局部轨迹融合图g,对每个目标节点vi∈v,采用重启随机游走策略生成大小为k的子图;然后屏蔽了每个子图中的目标节点,将目标节点的属性向量设置为零向量;将目标节点及其相关子图组合成实例对;合并后,正对和负对保存到对应的样本池中,目标节点对自己的子图为正,对其他节点的子图为负;实例对pi公式如下:
29、pi=(vi,gi,yi) (3)
30、其中vi为目标节点,gi为目标节点vi的子图,其邻接矩阵为ai,其定义公式如下:
31、gi=(ai,xi) (4)
32、其中yi为pi的标签,若pi为正对则为1,负对则为0;
33、s5.2:生成模块:对于每个节点vi∈v,将其子图gi作为输入,使用图卷积网络设计编码器gnne和解码器gnnd,来生成每个节点的历史访问程度,其计算公式如下:
34、
35、
36、其中为添加了自连接的矩阵,in为单位矩阵,为度矩阵,为编码器gnne第l层的输出,输入定义为属性矩阵xi,为编码器gnne第l-1层的可训练参数矩阵,wd是解码器gnnd的可训练参数矩阵,σ(·)是一个激活函数,是通过解码器gnnd生成的节点vi的历史访问次数;vd是v中每个节点的历史访问次数的集合,其中vdi是节点vi的真实历史访问次数;通过最小化vi的原始特征和重建特征之间的均方误差,生成模块的目标函数如下:
37、
38、对于生成模块,定义其反应各节点生成异常程度的函数如下:
39、
40、s5.3:对比学习模块:通过学习正常局部轨迹与其邻居之间的相似性,以检测异常局部轨迹。将s5.2中目标节点的特征向量矩阵xi和s5.1中的正负采样子图作为输入,通过读出模块,将其转换为嵌入向量使用平均池函数作为读出函数,公式如下:
41、
42、其中,k代表子图大小,j代表的第j行向量;
43、通过训练在mlp模块中的we来更改目标节点的属性,将其映射到相同的嵌入空间,公式如下:
44、
45、其中,代表目标节点隐藏向量的第l层,代表目标节点的属性向量;
46、通过一个基于双线性变换的判别器,来计算判别分数,公式如下:
47、
48、通过jensenshannon散度目标函数进行训练对比学习模块,公式如下:
49、
50、其中,和分别代表了正对和负对的分数;
51、通过对比学习异常分数函数,计算每个节点与其邻居的一致性进而判断其异常程度,公式如下:
52、
53、s5.4:异常分数计算:通过α和β来控制s5.2中的生成部分和s5.3中的对比学习部分的异常程度,计算出最终每个节点的异常分数,公式如下:
54、f(vi)=αfgen(vi)+βfcon(vi) (14)
55、s5.5:通过α和β来控制s5.2和s5.3中的损失函数,得出最终的损失函数,公式如下:
56、l=αlgen+βlcon (15)
57、对每个节点执行r轮操作,每轮操作包括步骤s5.2至s5.4,最终得到每个节点的异常分数;
58、s5.6:异常轨迹检测:通过s5.4的异常分数,得到了异常局部轨迹集合ano_sub,从所有历史轨迹中删除异常子轨迹,获得频繁轨迹。异常轨迹集合ano定义如下:
59、
60、其中,是轨迹ti的局部轨迹集合。
61、s6:可视化s5.5中检测出的异常局部轨迹,使用不同线条突出异常局部轨迹。
62、本发明的第二个方面涉及一种基于图对比自监督学习的异常局部轨迹检测装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现本发明的一种基于图对比自监督学习的异常局部轨迹检测方法。
63、本发明的第三个方面涉及一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,实现本发明的一种基于图对比自监督学习的异常局部轨迹检测方法。
64、本发明首先使用了轨迹投影方法,将gps轨迹点转化为路网的轨迹数据新表示,从而得到了更为精准的轨迹数据,使得提出方法的检测结果更为准确。其次,使用自监督学习从无监督数据中学习数据特征,使得模型对数据的要求更低。最后使用图对比自监督学习来完成正负样本对比任务,使模型能够学习正常节点的潜在模式,从而能够从出租车轨迹数据中检测出异常局部轨迹。
65、本发明的优点是:
66、1、能够检测到局部异常:现有方法的检测目标大多基于全局视角,虽然能够检测出异常的轨迹,但却无法找出异常发生的具体位置。本发明将检测视角聚焦于局部,能够检测出异常发生的具体位置。
67、2、精准的轨迹匹配:现有方法大多使用网格划分法对gps轨迹进行重表示,这种方法对于网格的大小有着严格的要求,且对于不同数据需要进行调整,不够便利。本发明设计了一种轨迹投影至路网的方法,能够得到轨迹更加精准的表示,使得检测更加精准。
68、3、自监督学习无需数据标签:现有方法大多为有监督学习,需要利用有标签的数据迅雷模型,但轨迹数据集大多没有标签,这使得他们的方法的训练过程变得困难。本发明设计了一种图对比自监督学习的方法,通过设立正负样本对比任务,使模型能够从数据集中学习正常轨迹的模式,从而最终能够从轨迹数据中检测出异常轨迹。
- 还没有人留言评论。精彩留言会获得点赞!