双系统版本处理方法、装置、示教系统及存储介质与流程
本发明涉及机器人双系统控制,具体而言,涉及一种双系统版本处理方法、装置、示教系统及存储介质。
背景技术:
1、目前工业机器人多采用双系统的方式进行作业,即工业机器人示教系统中的示教器与控制器上都部署有控制软件、且采用网络通讯方式进行数据交互。当控制器或者示教器出现问题时,通过更换示教器或者控制器搭配以及应急生产需求,从而导致示教器与控制器二者的控制软件的版本相差较大,影响通讯连接。
技术实现思路
1、为了避免示教器与控制器二者的控制软件的版本相差较大影响通讯连接,本发明提供了一种双系统版本处理方法、装置、示教系统及存储介质。
2、本发明的实施例可以这样实现:
3、第一方面,本发明提供一种双系统版本处理方法,应用于工业机器人示教系统中的控制器,所述工业机器人示教系统还包括示教器和工业机器人,所述控制器分别与所述示教器和所述工业机器人通信连接,所述控制器和所述示教器均部署有控制软件,所述控制器上的控制软件为第一控制软件,所述示教器上的控制软件为第二控制软件,所述方法包括:
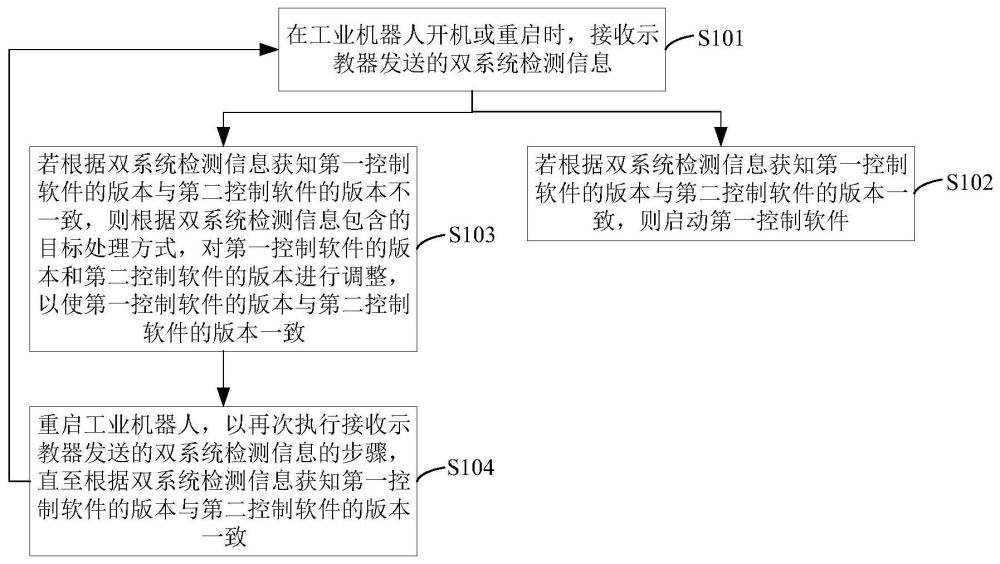
4、在所述工业机器人开机或重启时,接收所述示教器发送的双系统检测信息;
5、若根据所述双系统检测信息获知所述第一控制软件的版本与所述第二控制软件的版本一致,则启动所述第一控制软件;
6、若根据双系统检测信息获知所述第一控制软件的版本与所述第二控制软件的版本不一致,则根据所述双系统检测信息包含的目标处理方式,对所述第一控制软件的版本和所述第二控制软件的版本进行调整,以使所述第一控制软件的版本与所述第二控制软件的版本一致;
7、重启所述工业机器人,以再次执行所述接收所述示教器发送的双系统检测信息的步骤,直至根据所述双系统检测信息获知所述第一控制软件的版本与所述第二控制软件的版本一致。
8、可选地,所述根据所述双系统检测信息包含的目标处理方式,对所述第一控制软件的版本和所述第二控制软件的版本进行调整的步骤包括:
9、若所述目标处理方式为同步,则将所述第一控制软件的版本作为目标版本,从本地获取版本为所述目标版本的安装软件;
10、发送所述安装软件至所述示教器,以使所述示教器通过运行所述安装软件,更新所述第二控制软件的版本。
11、可选地,所述控制器包括第一usb接口,所述根据所述双系统检测信息包含的目标处理方式,对所述第一控制软件的版本和所述第二控制软件的版本进行调整的步骤还包括:
12、若所述目标处理方式为升级,则对所述第一usb接口进行检测;
13、若检测到所述第一usb接口插入u盘,则对所述u盘进行扫描;
14、若扫描到所述u盘中存储有系统升级软件,则对所述系统升级软件进行完整性校验,其中,所述系统升级软件包括控制器升级软件和示教器升级软件;
15、若所述系统升级软件通过完整性校验,则运行所述控制器升级软件,对所述第一控制软件的版本进行更新;
16、发送所述示教器升级软件至所述示教器,以使所述示教器通过运行所述示教器升级软件,更新所述第二操作软件的版本。
17、第二方面,本发明提供一种双系统版本处理方法,应用于工业机器人示教系统中的示教器,所述工业机器人示教系统还包括控制器和工业机器人,所述控制器分别与所述示教器和所述工业机器人通信连接,所述控制器和所述示教器均部署有控制软件,所述控制器上的控制软件为第一控制软件,所述示教器上的控制软件为第二控制软件,所述方法包括:
18、在所述工业机器人开机或重启时,比较所述第一控制软件的版本与所述第二控制软件的版本,得到比较结果;
19、若所述比较结果为所述第一控制软件的版本与所述第二控制软件的版本一致,则启动所述第二控制软件,并将包含所述比较结果的双系统检测信息发送给所述控制器,以使所述控制器启动所述第一控制软件;
20、若所述比较结果为所述第一控制软件的版本与所述第二控制软件的版本不一致,则将包含所述比较结果与用户输入的目标处理方式的双系统检测信息发送给所述控制器,以使所述控制器根据所述目标处理方式,对所述第一控制软件的版本和所述第二控制软件的版本进行调整,以使所述第一控制软件的版本与所述第二控制软件的版本一致;
21、重启所述工业机器人,以再次执行所述比较所述第一控制软件的版本与所述第二控制软件的版本,得到比较结果的步骤,直至所述比较结果为所述第一控制软件的版本与所述第二控制软件的版本一致。
22、可选地,在所述将包含所述比较结果与用户输入的目标处理方式的双系统检测信息发送给所述控制器后,所述方法还包括:
23、若所述目标处理方式为同步,则接收所述控制器发送的安装软件;
24、运行所述安装软件,以将所述第二控制软件的版本的软件更新至与所述第一控制软件的版本一致。
25、可选地,所述示教器包括第二usb接口,在所述将包含所述比较结果与用户输入的目标处理方式的双系统检测信息发送给所述控制器后,所述方法还包括:
26、若所述目标处理方式为升级,则对所述第二usb接口进行检测;
27、若检测到所述第二usb接口插入u盘,则对所述u盘进行扫描;
28、若扫描到所述u盘中存储有系统升级软件,则对所述系统升级软件进行完整性校验,其中,所述系统升级软件包括控制器升级软件和示教器升级软件;
29、若所述系统升级软件通过完整性校验,则运行所述示教器升级软件,对所述第二控制软件的版本进行更新;
30、发送所述控制器升级软件至所述控制器,以使所述控制器通过运行所述控制器升级软件,更新所述第一控制软件的版本。
31、第三方面,本发明提供一种双系统版本处理装置,应用于工业机器人示教系统中的控制器,所述工业机器人示教系统还包括示教器和工业机器人,所述控制器分别与所述示教器和所述工业机器人通信连接,所述控制器和所述示教器均部署有控制软件,所述控制器上的控制软件为第一控制软件,所述示教器上的控制软件为第二控制软件,所述装置包括:
32、接收模块,用于在所述工业机器人开机或重启时,接收所述示教器发送的双系统检测信息;
33、第一启动模块,用于若根据所述双系统检测信息获知所述第一控制软件的版本与所述第二控制软件的版本一致,则启动所述第一控制软件;
34、第一处理模块,用于若根据双系统检测信息获知所述第一控制软件的版本与所述第二控制软件的版本不一致,则根据所述双系统检测信息包含的目标处理方式,对所述第一控制软件的版本和所述第二控制软件的版本进行调整,以使所述第一控制软件的版本与所述第二控制软件的版本一致;重启所述工业机器人,以再次执行所述接收所述示教器发送的双系统检测信息的步骤,直至根据所述双系统检测信息获知所述第一控制软件的版本与所述第二控制软件的版本一致。
35、第四方面,本发明提供一种双系统版本处理装置,应用于工业机器人示教系统中的示教器,所述工业机器人示教系统还包括控制器和工业机器人,所述控制器分别与所述示教器和所述工业机器人通信连接,所述控制器和所述示教器均部署有控制软件,所述控制器上的控制软件为第一控制软件,所述示教器上的控制软件为第二控制软件,所述装置包括:
36、比较模块,用于在所述工业机器人开机或重启时,比较所述第一控制软件的版本与所述第二控制软件的版本,得到比较结果;
37、第二启动模块,用于若所述比较结果为所述第一控制软件的版本与所述第二控制软件的版一致,则启动所述第二控制软件,并将包含所述比较结果的双系统检测信息发送给所述控制器,以使所述控制器启动所述第一控制软件;
38、第二处理模块,用于若所述比较结果为所述第一控制软件的版本与所述第二控制软件的版本不一致,则将包含所述比较结果与用户输入的目标处理方式的双系统检测信息发送给所述控制器,以使所述控制器根据所述目标处理方式,对所述第一控制软件的版本和所述第二控制软件的版本进行调整,以使所述第一控制软件的版本与所述第二控制软件的版本一致;重启所述工业机器人,以再次执行所述比较所述第一控制软件的版本与所述第二控制软件的版本,得到比较结果的步骤,直至所述比较结果为所述第一控制软件的版本与所述第二控制软件的版本一致。
39、第五方面,本发明提供一种工业机器人示教系统,其特征在于,其包括工业机器人、控制器以及示教器,所述控制器存储有第一计算机程序,所述第一计算机程序被执行时实现如前述第一方面所述的双系统版本处理方法,所示示教器存储有第二计算机程序,所述第二计算机程序被执行时实现如前述第二方面所述的双系统版本处理方法。
40、第六方面,本发明提供一种计算机可读存储介质,其存储有第一计算机程序和第二计算程序,所述第一计算机程序被控制器执行时实现如前述第一方面所述的双系统版本处理方法,所述第二计算机程序被示教器执行时实现如前述第二方面所述的双系统版本处理方法。
41、本发明公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本发明公开的上述技术即可得知。
42、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!