目标车辆航向检测方法、装置和存储介质与流程
本公开涉及自动驾驶,尤其涉及一种目标车辆航向检测方法、装置和存储介质。
背景技术:
1、近年来,随着汽车产业智能驾驶行业的高速发展,车辆在行驶道路上对周围环境的感知,是无人驾驶技术研究领域的关键组成部分,目标车辆(即其他车辆)的航向是对目标车辆进行定位和运动状态估计的主要参数之一。
2、目前,车辆航行预测的研究主要分为基于追踪的方法、基于深度学习分割的方法和3d目标检测的方法。其中,基于追踪的方法是采用多帧图像中目标车辆的行驶轨迹进行航向的预测,严重依赖于多帧图像的结果,实时性不高;有部分研究者利用深度学习网络分割出车辆的纵向底盘线,此方法严重依赖于分割精度,且底盘线并非位于接地处,鱼眼摄像头的高畸变会造成不可忽略的影响;此外,有研究者利用3d目标检测网络直接预测航向角的大小,但其标注复杂并且计算量大,不足应用于算力紧张的嵌入式平台。
3、由此可见,目前车辆航向检测存在精度低、计算量大以及实时性差的问题。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种目标车辆航向检测方法、装置和存储介质,解决现有技术中航向检测精度低、计算量大以及实时性差的问题。
2、第一方面,本公开实施例提供了一种目标车辆航向检测方法,该方法包括:
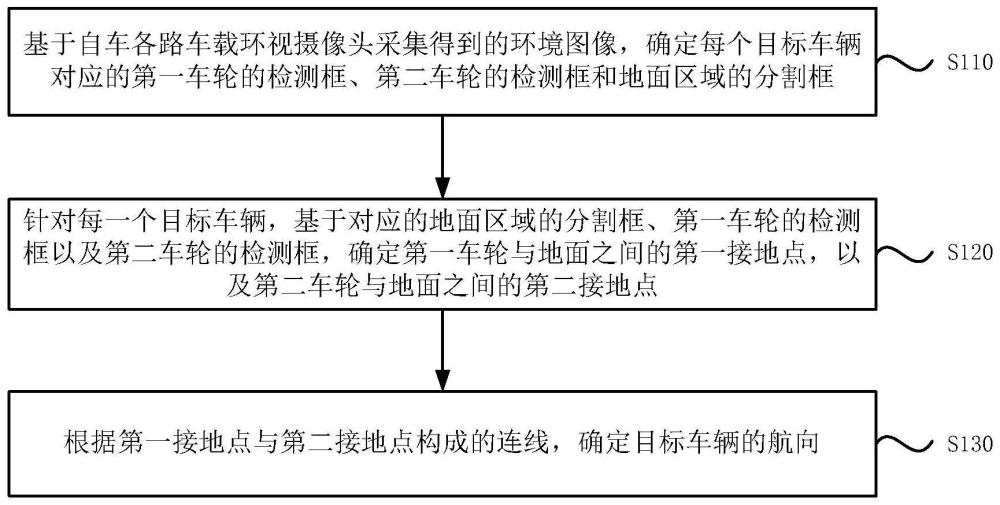
3、基于自车各路车载环视摄像头采集得到的环境图像,确定每个目标车辆对应的第一车轮的检测框、第二车轮的检测框和地面区域的分割框,其中,所述第一车轮和所述第二车轮位于所述目标车辆的车身同一侧,所述地面区域为地面中未被覆盖的自车的可行驶区域;
4、针对每一个目标车辆,基于对应的地面区域的分割框、第一车轮的检测框以及第二车轮的检测框,确定第一车轮与地面之间的第一接地点,以及第二车轮与地面之间的第二接地点;
5、根据所述第一接地点与所述第二接地点构成的连线,确定所述目标车辆的航向。
6、第二方面,本公开实施例还提供了一种目标车辆航向检测装置,该装置包括:
7、检测框确定模块,用于基于自车各路车载环视摄像头采集得到的环境图像,确定每个目标车辆对应的第一车轮的检测框、第二车轮的检测框和地面区域的分割框,其中,所述第一车轮和所述第二车轮位于所述目标车辆的车身同一侧,所述地面区域为地面中未被覆盖的自车的可行驶区域;
8、接地点确定模块,用于针对每一个目标车辆,基于对应的地面区域的分割框、第一车轮的检测框以及第二车轮的检测框,确定第一车轮与地面之间的第一接地点,以及第二车轮与地面之间的第二接地点;
9、航向确定模块,用于根据所述第一接地点与所述第二接地点构成的连线,确定所述目标车辆的航向。
10、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的目标车辆航向检测方法。
11、第四方面,本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上所述的目标车辆航向检测方法。
12、本公开实施例提供的一种目标车辆航向检测方法,通过自车各路车载环视摄像头采集得到的环境图像,确定每个目标车辆对应的第一车轮的检测框、第二车轮的检测框以及地面区域的分割框,进而针对每一个目标车辆,根据对应的地面区域的分割框、第一车轮的检测框以及第二车辆的检测框,分别确定第一车轮、第二车轮与地面之间的第一接地点、第二接地点,最终根据第一接地点和第二接地点构成的连线确定目标车辆的航向,实现基于实时采集的图像的航向检测,该方法不依赖于多帧图像,也不依赖于深度学习网络的分割精度和3d的航向角检测网络的训练,所需算力低,实时性强,可以满足在低算力平台的部署,且基于地面区域和车轮的检测框对航向进行预测,可以提高航向检测的准确性,此外,该方法可弥补自车对周围较近区域的感知盲区,提高感知精度。
技术特征:
1.一种目标车辆航向检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于各路车载环视摄像头采集得到的环境图像,确定每个目标车辆对应的第一车轮的检测框、第二车轮的检测框和地面区域的分割框,包括:
3.根据权利要求2所述的方法,其特征在于,在判断所述待验证车轮的检测框是否为所述目标车辆对应的车轮的检测框之后,还包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述基于当前环境图像中同一车轮的检测框和其他环境图像中同一车轮的检测框,更新所述同一车轮的检测框,包括:
6.根据权利要求2所述的方法,其特征在于,在判断所述待验证车轮的检测框是否为所述目标车辆对应的车轮的检测框之后,还包括:
7.根据权利要求1所述的方法,其特征在于,所述基于对应的地面区域的分割框、第一车轮的检测框以及第二车轮的检测框,确定第一车轮与地面之间的第一接地点,以及第二车轮与地面之间的第二接地点,包括:
8.根据权利要求7所述的方法,其特征在于,所述基于每个第一扫描点与地面区域的分割框之间的距离,于所述地面区域的分割框上确定第一接地点,包括:
9.一种目标车辆航向检测装置,其特征在于,所述装置包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-8中任一项所述的方法。
技术总结
本公开实施例公开了一种目标车辆航向检测方法、装置和存储介质,该方法通过自车各路车载环视摄像头采集得到的环境图像,确定每个目标车辆对应的第一车轮的检测框、第二车轮的检测框以及地面区域的分割框,进而针对每一个目标车辆,分别确定第一车轮、第二车轮与地面之间的第一接地点、第二接地点,最终根据第一接地点和第二接地点构成的连线确定目标车辆的航向,实现基于实时采集的图像的航向检测,该方法不依赖于多帧图像,也不依赖于深度学习网络的分割精度和3D的航向角检测网络的训练,所需算力低,实时性强,可以满足在低算力平台的部署,提高航向检测的准确性。
技术研发人员:冯彪,王子涵,樊志远,刘洋
受保护的技术使用者:驭势(上海)汽车科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!