地面标志检测方法、智能设备及存储介质与流程
本申请涉及自动驾驶,具体提供一种地面标志检测方法、智能设备及存储介质。
背景技术:
1、目前,现有的地面标志识别方法通常依赖于点云数据的处理,其过程包括识别环境中的各种物体、结构和特征,然后将它们映射到地面上。然而,点云数据常常收到周围环境的影响,在恶劣天气条件下(如雨、雪、雾等),容易产生无法使用或包含大量噪声的数据,从而导致难以进行准确的地面标志识别。
2、相应地,本领域需要一种新的地面标志检测方案来解决上述问题。
3、申请内容
4、为了克服上述缺陷,提出了本申请,以提供解决或至少部分地解决上述的技术问题。本申请提供了一种地面标志检测方法、智能设备及存储介质。
5、在第一方面,本申请提供一种地面标志检测方法,所述方法包括:
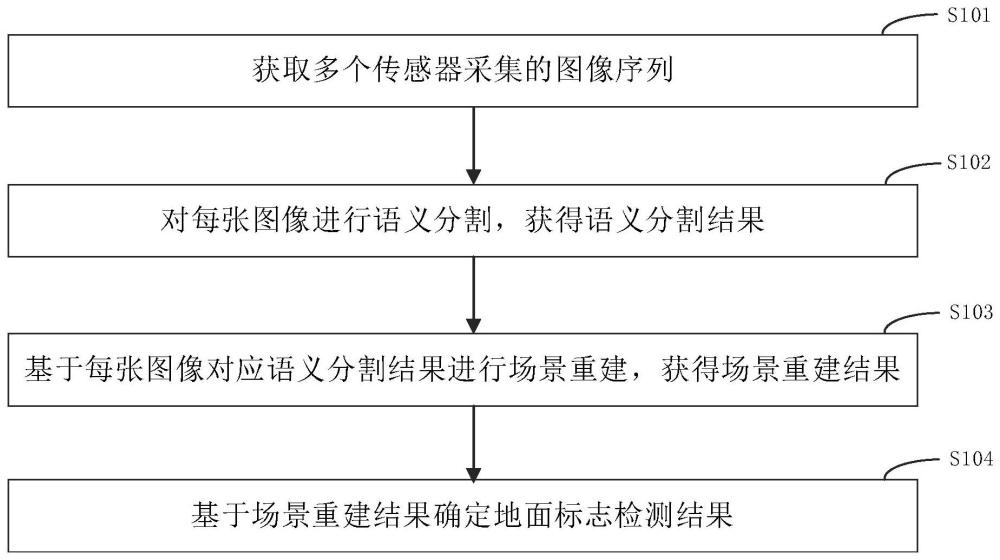
6、获取多个传感器采集的图像序列;
7、对每张图像进行语义分割,获得语义分割结果;
8、基于每张图像对应语义分割结果进行场景重建,获得场景重建结果;
9、基于所述场景重建结果确定地面标志检测结果。
10、在一个实施方式中,所述基于所述场景重建结果获取地面标志检测结果,包括:
11、将所述场景重建结果映射到bev视角,获得鸟瞰图;
12、基于每一像素的类型从所述鸟瞰图中提取目标元素,获得所述地面标志检测结果。
13、在一个实施方式中,在基于每一像素的类型从所述鸟瞰图中提取目标元素之前,所述方法还包括:
14、获取所述鸟瞰图中目标元素所在位置;
15、基于所述鸟瞰图和所述目标元素所在位置对所述目标元素进行修正。
16、在一个实施方式中,所述目标元素为所述鸟瞰图中所有目标元素或符合预设条件的目标元素,其中所述预设条件为组成所述目标元素的像素数量小于预设像素数量阈值。
17、在一个实施方式中,所述基于所述鸟瞰图和所述目标元素所在位置对所述目标元素进行修正,包括:利用图像分割模型、基于所述鸟瞰图和所述目标元素所在位置对所述目标元素进行修正,其中所述第一分割模型为图像分割模型。
18、在一个实施方式中,所述基于每张图像对应语义分割结果进行场景重建,获得场景重建结果,包括:利用神经辐射场对同一时序下的语义分割结果进行场景重建,获得所述场景重建结果。
19、在一个实施方式中,所述方法还包括:基于所述地面标志检测结果计算地面标志矢量,所述地面标志矢量包括所提取的地面标志相对于智能设备的方向、角度以及相对距离。
20、在一个实施方式中,所述多个传感器至少包括设置在智能设备的前、左、右三个方向的传感器。
21、在第二方面,本申请提供一种智能设备,所述智能设备包括:
22、至少一个处理器;
23、以及,与所述至少一个处理器通信连接的存储器;
24、其中,所述存储器中存储有计算机程序,所述计算机程序被所述至少一个处理器执行时实现前述的地面标志检测方法。
25、在第三方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行前述任一项所述的地面标志检测方法。
26、本申请上述一个或多个技术方案,至少具有如下一种或多种有益效果:
27、本申请中的地面标志检测方法,具体包括:获取多个传感器采集的图像序列;对每张图像进行语义分割,获得语义分割结果;基于每张图像对应语义分割结果进行场景重建,获得场景重建结果;基于场景重建结果确定地面标志检测结果。如此,能够获得精确的地面标志识别结果,提升了地面标志识别的准确性,增强了地面标志识别在不同场景中的通用性。
技术实现思路
技术特征:
1.一种地面标志检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的地面标志检测方法,其特征在于,所述基于所述场景重建结果获取地面标志检测结果,包括:
3.根据权利要求2所述的地面标志检测方法,其特征在于,在基于每一像素的类型从所述鸟瞰图中提取目标元素之前,所述方法还包括:
4.根据权利要求3所述的地面标志检测方法,其特征在于,所述目标元素为所述鸟瞰图中所有目标元素或符合预设条件的目标元素,其中所述预设条件为组成所述目标元素的像素数量小于预设像素数量阈值。
5.根据权利要求3所述的地面标志检测方法,其特征在于,所述基于所述鸟瞰图和所述目标元素所在位置对所述目标元素进行修正,包括:利用图像分割模型、基于所述鸟瞰图和所述目标元素所在位置对所述目标元素进行修正。
6.根据权利要求1所述的地面标志检测方法,其特征在于,所述基于每张图像对应语义分割结果进行场景重建,获得场景重建结果,包括:利用神经辐射场对同一时序下的语义分割结果进行场景重建,获得所述场景重建结果。
7.根据权利要求1所述的地面标志检测方法,其特征在于,所述方法还包括:基于所述地面标志检测结果计算地面标志矢量,所述地面标志矢量包括所提取的地面标志相对于智能设备的方向、角度以及相对距离。
8.根据权利要求1所述的地面标志检测方法,其特征在于,所述多个传感器至少包括设置在智能设备的前侧、左侧、右侧三个方向的传感器。
9.一种智能设备,其特征在于,所述智能设备包括:
10.一种计算机可读存储介质,其中存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行权利要求1至8中任一项所述的地面标志检测方法。
技术总结
本申请涉及自动驾驶技术领域,具体提供一种地面标志检测方法、智能设备及存储介质,旨在解决现有的地面标志识别方法的识别精度不高的技术问题。为此目的,本申请的地面标志检测方法包括:获取多个传感器采集的图像序列;对每张图像进行语义分割,获得语义分割结果;基于每张图像对应语义分割结果进行场景重建,获得场景重建结果;基于场景重建结果确定地面标志检测结果。如此,能够获得精确的地面标志识别结果,提升了地面标志识别的准确性。
技术研发人员:朱鹏飞,罗鸿城,谢涛,任少卿
受保护的技术使用者:安徽蔚来智驾科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!