线阵推扫相机高频颤振误差补偿方法及系统
本发明涉及线阵推扫相机高频颤振误差补偿,特别是关于立体成像模式的光学高分辨率线阵推扫相机的内部一致性精度补偿技术方案。
背景技术:
1、深空探测任务受到极端温度、致命辐射以及微型陨石等恶劣的太空环境影响,载人行星飞行和探测有很高的技术难度,而月球作为深空探测的起点和前哨站,目前只有美国阿波罗载人登月工程完成了登月任务。对于类地行星、小行星、远日行星甚至系外行星而言,目前探测任务只能依赖探测器平台搭载的各类传感器设备完成,因此遥感技术在深空探测领域应用更为广泛。截至到2023年深空探测技术已有超过60年的历史,全球共发射257次深空探测任务,拍摄到海量的行星表面高精度影像,为行星形貌、表面气候和地质构造分析提供可靠的数据资源。
2、在火星探测任务中,通过遥感技术实现高精度的地理定位至关重要。然而卫星在发射过程受到应力释放的影响,在轨运行后温热等物理环境变化剧烈,这些因素都会给卫星传感器定位结果引入各项误差,主要包括轨道位置测量误差、卫星姿态测量误差、卫星姿态和轨道时间同步误差,以及相机校准中实验室结果与轨道参数值之间的校准差异。根据它们的误差特性,这些误差进一步分为系统误差和随机误差。系统误差,如校准误差和安装误差,相对稳定,在一定时间内变化很小,借助几何定标技术可以有效消除其影响。而对于随机误差,如卫星姿态和轨道同步误差,以及相机平台姿态抖动,它们会导致在卫星在推扫过程中像点重投影误差出现高频次、周期性变化。因此,本技术领域亟待提出新的技术方案,建立一个更精细的补偿模型,以进一步提高立体相机定位精度。
技术实现思路
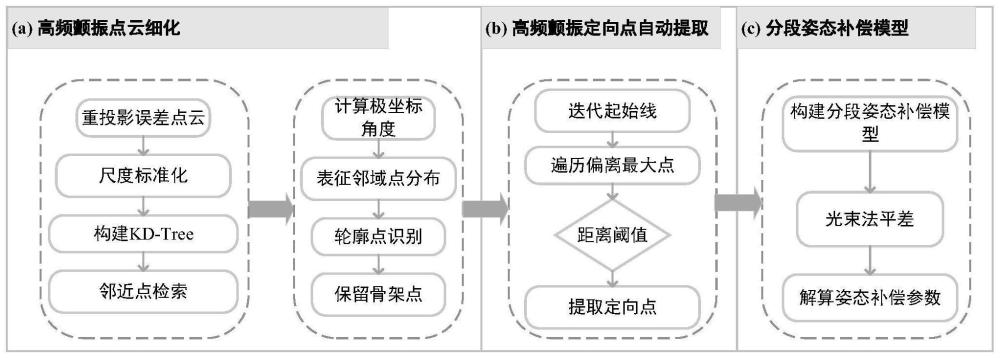
1、本发明基于立体相机同名像点在图像空间中的重投影误差分布特点,观察到这些误差具有高频抖动特性,提出构建一种分段姿态补偿模型。采用高频颤振残差点云细化和定向点自动提取方式,自动识别卫星颤振的转折点,并使用分段姿态补偿模型进行光束法平差,以提升立体相机的内部一致性。
2、为实现上述目的,本发明的技术方案提供一种线阵推扫相机高频颤振误差补偿方法,包括如下步骤:
3、高频颤振残差点云细化步骤,包括首先对二维高频颤振残差点云建立kd-tree数据结构,并遍历残差点查询满足距离阈值的若干样本;然后,计算当前残差点到所有周围样本点的极坐标角度,进而标记当前残差点周围点分布情况,并据此判断该点是否符合轮廓点条件,逐步迭代实现残差点云细化;
4、高频颤振定向点自动提取步骤,包括针对高频颤振残差点云细化结果,通过迭代端点拟合方式,选取首尾点连接成起始曲线,逐点计算到起始曲线的距离,并找到最大距离的点;然后,根据距离阈值标记当前点是否满足定向点建立条件,逐步迭代实现定向点提取;
5、周期性高频误差补偿模型构建步骤,包括利用高频颤振定向点自动提取结果,对相机的严密几何定位模型中引入周期性姿态补偿矩阵,每景影像按照高频误差周期得到若干组姿态补偿参数,每组参数包括姿态补偿角,实现提升卫星定位精度。
6、而且,高频颤振残差点云细化步骤中,所述迭代实现残差点云细化,实现方式如下,
7、步骤1.1、基于高频颤振残差点云分布,以纵坐标像点残差值作为标准,重新给像点行号坐标值分配权重,得到新的距离空间;
8、步骤1.2、建立kd-tree数据结构,从树的根节点开始,按照分割维度的规则,递归地遍历kd-tree,最终返回小于距离阈值的所有邻近点集;
9、步骤1.3、表征残差点及其所有邻近点之间的空间位置关系;
10、步骤1.4、识别与剔除轮廓点,包括将残差点邻域划分为8块子区域,存在邻域点的子区域标记为1,否则标记为0,若满足预设判别条件则将此残差点标记为轮廓点并剔除:
11、步骤1.5、迭代执行步骤1.2-1.5,逐步识别并剔除残差点云中的轮廓点,,自动实现残差点云的骨架点提取。
12、而且,高频颤振定向点自动提取步骤中,根据距离阈值标记当前点是否满足定向点建立条件,逐步迭代实现定向点提取,实现方式如下,
13、步骤2.1、首先根据定位精度要求设定距离阈值;
14、步骤2.2、然后在给定的残差点云中选取首尾点,并连接成起始曲线;计算中间各点到起始曲线的距离,并找到最大距离及最大距离点;
15、步骤2.3、最后执行判断:若大于设定的距离阈值,则将该最大距离点标记为定向点,并分别与起始曲线的首尾点组成新的简化曲线,返回步骤2.2进入迭代过程;若小于等于设定的距离阈值,结束迭代,得到高频颤振定向点结果。
16、而且,周期性高频误差补偿模型构建步骤中,提升卫星定位精度的实现方式如下,
17、首先建立基于偏置矩阵的分段高频误差补偿模型,根据定向点分布将长条带影像分解为若干个结构稳定、相对独立的子条带;每个子条带影像的同名点对被单独建模和优化,然后集成到一个整体平差框架中;根据物方和像方探元指向建立观测方程;
18、然后同时优化物方点坐标和姿态补偿角,并按照泰勒级数展开,进一步对式误差方程法化,建立法方程;最后迭代求解改正数向量,更新物方坐标和姿态补偿角元素。
19、而且,用于立体成像模式的光学高分辨率线阵推扫相机的内部一致性精度补偿。
20、另一方面,本发明还提供一种线阵推扫相机高频颤振误差补偿系统,用于实现如上所述的一种线阵推扫相机高频颤振误差补偿方法。
21、而且,包括以下模块,
22、第一模块,用于高频颤振残差点云细化,包括首先对二维高频颤振残差点云建立kd-tree数据结构,并遍历残差点查询满足距离阈值的若干样本;然后,计算当前残差点到所有周围样本点的极坐标角度,进而标记当前残差点周围点分布情况,并据此判断该点是否符合轮廓点条件,逐步迭代实现残差点云细化;
23、第二模块,用于高频颤振定向点自动提取,包括针对高频颤振残差点云细化结果,通过迭代端点拟合方式,选取首尾点连接成起始曲线,逐点计算到起始曲线的距离,并找到最大距离的点;然后,根据距离阈值标记当前点是否满足定向点建立条件,逐步迭代实现定向点提取;
24、第三模块,用于周期性高频误差补偿模型构建,包括利用高频颤振定向点自动提取结果,对相机的严密几何定位模型中引入周期性姿态补偿矩阵,每景影像按照高频误差周期得到若干组姿态补偿参数,每组参数包括姿态补偿角,实现提升卫星定位精度。
25、或者,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的存储指令执行如上所述的一种线阵推扫相机高频颤振误差补偿方法。
26、或者,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种线阵推扫相机高频颤振误差补偿方法。
27、与现有技术相比,本发明具备的优点:
28、1、针对卫星定位模型中高频颤振误差,建立分段姿态补偿模型,提高了相机内部一致性。
29、2、利用定向点自动提取,准确识别卫星推扫过程中高频颤振误差的转折点,从而实现对影像子条带的独立建模。
30、3、以目标点在像方和物方空间指向一致性为约束,建立光束法平差,求解姿态补偿参数,避免了探究成像机理参数的复杂性及各参数之间相关性问题。
31、4、对高频颤振误差的每个周期解算一套姿态补偿参数,相较于按照时间累积量自动划分区间的方式,更为准确和高效,尤其是在解决大区域制图任务中更能发挥其优势。
32、基于以上优点,本发明可以广泛应用于线阵推扫相机高频颤振误差补偿中。
- 还没有人留言评论。精彩留言会获得点赞!