车辆语义定位的修正方法及装置、电子设备及存储介质与流程
本发明涉及定位,具体涉及一种车辆语义定位的修正方法及装置、电子设备及存储介质。
背景技术:
1、随着智能化,数字化的快速发展,以大数据为基础的人工智能发展以成不可阻挡之势。其中,智能驾驶领域作为人工智能发展的一大发展方向,在我国具有良好的发展前景和经济效应,以成为当国内发展的重要领域。
2、在整个自动驾驶领域中,高精度的定位能力是车辆在运行过程中控制的必要信息和安全性保障。随着当下计算机视觉技术的发展,以图像信息结合传统高精度全球卫星导航系统(global navigation satellite system,gnss)rtk设备的融合定位方法,已成为当前车辆定位的一种重要手段。特别是在卫星信号薄弱的环境下,车辆的定位的连续性和高精度则完全由地图和前视图像的感知语义结果所限定。一般情况下,由于高精度地图的结果较为准确,因此图像感知的语义效果将直接决定定位精度的关键。
3、在相关技术中,在计算机设备和深度学习方法的高速发展下,前视图像的感知语义主要采用深度卷积神经网络或者transformer网络的处理框架,在当前标注真值和计算方法的情况下,一般准确度仅能达到80%。因此,在定位的计算中,一般会设置置信度,用于优化语义结果。这样的方法一般需要增加额外的计算代价(包括前期的网络学习和后期的处理)。同时,方法还需要添加更多的数据支持,进而导致计算成本和人工成本高,且难以提供高准确度的效果。
4、由此可见,相关技术中车辆语义定位存在计算成本和人工成本高,且难以提供高准确度的技术问题。
技术实现思路
1、本发明的目的之一在于提供一种车辆语义定位的修正方法,以解决现有技术中的车辆语义定位存在计算成本和人工成本高,且难以提供高准确度的问题;目的之二在于提供一种车辆语义定位的修正装置;目的之三在于提供一种电子设备;目的之四在于提供一种计算机可读的存储介质。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种车辆语义定位的修正方法,包括:
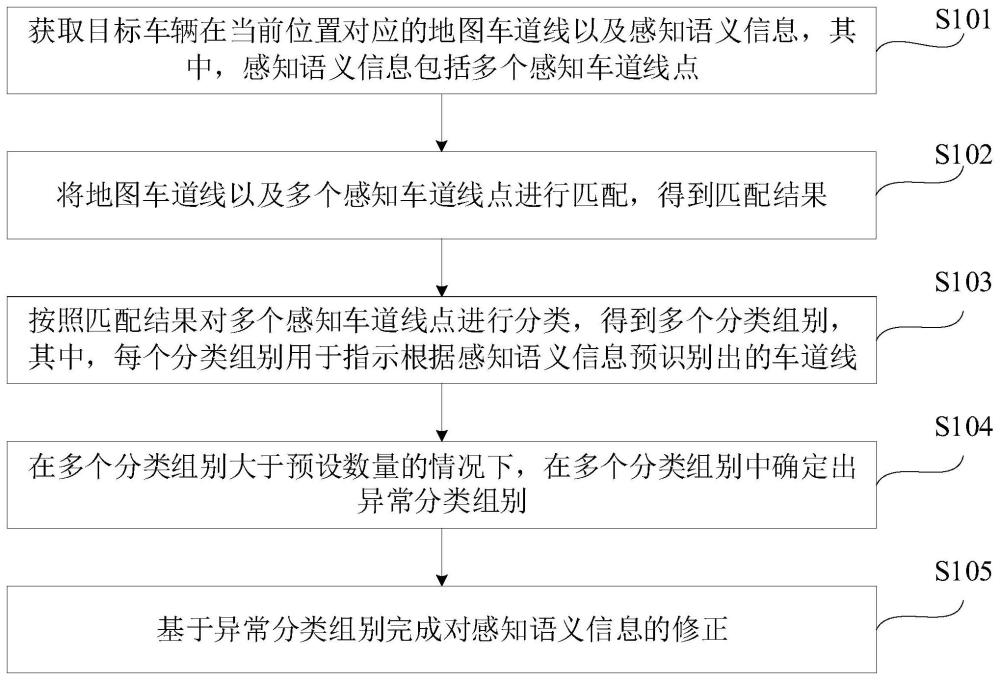
4、获取目标车辆在当前位置对应的地图车道线以及感知语义信息,其中,所述感知语义信息包括多个感知车道线点;
5、将所述地图车道线以及所述多个感知车道线点进行匹配,得到匹配结果;
6、按照所述匹配结果对所述多个感知车道线点进行分类,得到多个分类组别,其中,每个所述分类组别用于指示根据感知语义信息预识别出的车道线;
7、在所述多个分类组别大于预设数量的情况下,在所述多个分类组别中确定出异常分类组别;
8、基于所述异常分类组别完成对所述感知语义信息的修正。
9、通过本实施例的方法,采用将所述地图车道线以及所述多个感知车道线点进行匹配,得到匹配结果;按照所述匹配结果对所述多个感知车道线点进行分类,得到多个分类组别;并且由于一般情况下车辆左右的车道线数量已知,因此在所述多个分类组别大于已知的预设数量的情况下,在所述多个分类组别中确定出异常分类组别,并且基于所述异常分类组别完成对所述感知语义信息的修正,从而可以达到对感知语义信息进行修正的目的,避免错误感知的车道线对定位造成的影响;从而有利于提升语义定位的准确度,并且此方法无需添加数据支持,从而也可有效降低计算成本和人工成本;进而可以解决相关技术中存在的车辆语义定位存在计算成本和人工成本高,且难以提供高准确度的技术问题。
10、可选地,如前述的车辆语义定位的修正方法,在所述获取目标车辆在当前位置对应的地图信息以及感知语义信息之前,所述方法还包括:
11、对相机系统循环进行标定操作,直至相机系统的重投影误差在预设误差范围内为止;
12、获取所述感知语义信息包括:
13、通过所述相机系统对所述当前位置对应的车道线进行图像采集,得到车道线图像信息;
14、对所述车道线图像信息进行语义分割,得到所述感知语义信息。
15、通过本实施例的方法,预先对相机系统进行标定,从而可以提升相机系统采集的车道线图像信息的准确性,进而提升后期语义分割,得到感知语义信息的准确性。
16、可选地,如前述的车辆语义定位的修正方法,所述将所述地图车道线以及所述多个感知车道线点进行匹配,得到匹配结果,包括:
17、将每个地图车道线分别与每个感知车道线点进行最小平方距离计算,得到对应于每个点线组对应的距离,其中,所述每个点线组中包括一个地图车道线以及一个感知车道线点;
18、按照所述每个点线组对应的距离,确定出所述地图车道线与所述感知车道线点之间的匹配结果。
19、通过本实施例的方法,提供了一种可以快速计算得到地图车道线与感知车道线点之间的匹配结果的实现方式,可以有效提升处理效率。
20、可选地,如前述的车辆语义定位的修正方法,所述按照所述匹配结果对所述多个感知车道线点进行分类,得到多个分类组别,包括:
21、按照多个预设距离阈值,对所述感知车道线点进行分类,得到与每个预设距离阈值对应的分类组别,其中,所述预设距离阈值用于指示感知车道线点与地图车道线之间距离。
22、通过本实施例的方法,提供了一种可以对感知车道线点进行分类的实现方式,并且可以有效提升分类的准确性,以及分类的处理效率。
23、可选地,如前述的车辆语义定位的修正方法,在将所述地图车道线以及所述多个感知车道线点进行匹配,得到匹配结果之前,所述方法还包括:
24、确定出高斯投影的坐标原点,以及基于所述坐标原点的车辆坐标系;
25、将所述地图车道线以及所述多个感知车道线点投影至所述车辆坐标系下。
26、通过本实施例的方法,可以将所有信息都投影到车辆坐标系下,从而可以便于后期在一个坐标系下对不同的数据进行统一处理。
27、可选地,如前述的车辆语义定位的修正方法,所述在所述多个分类组别大于预设数量的情况下,在所述多个分类组别中确定出异常分类组别,包括:
28、在所述多个分类组别大于2组的情况下,基于每个分类组别中的所有感知车道线点,确定出与所述每个分类组别对应的异常判断结果;
29、基于与所述每个分类组别对应的异常判断结果,在所述多个分类组别中确定出异常分类组别。
30、通过本实施例的方法,可以在分类组别的数量大于2组的情况下,确定出异常分类组别,从而可以实现对感知语义信息的修正。
31、可选地,如前述的车辆语义定位的修正方法,所述基于每个分类组别中的所有感知车道线点,确定出与所述每个分类组别对应的异常判断结果,包括:
32、将每个分类组别中的所有感知车道线点按照预设顺序进行全排列,构建出所述每个分类组别对应的主值矩阵;
33、计算得到每个主值矩阵对应的第二主值,其中,所述第二主值用于指示所对应的主值矩阵包含的所有感知车道线点在指定方向上的相关性,所述指定方向为所述车道线方向;
34、根据所有第二主值,确定出所述每个分类组别对应的异常判断结果。
35、可选地,如前述的车辆语义定位的修正方法,所述根据所有第二主值,确定出所述每个分类组别对应的异常判断结果,包括:
36、判断指定第二主值是否在预设数值范围内,得到数值大小判断结果,其中,所述指定第二主值是指定分类组别对应的第二主值,所述指定分类组别为所述多个分类组别中的任一个分类组别;在所述数值大小判断结果指示所述指定第二主值在预设数值范围内的情况下,确定出指示所述指定分类组别为异常分类组别的异常判断结果;在所述数值大小判断结果指示所述指定第二主值不在预设数值范围内的情况下,确定出指示所述指定分类组别为正常分类组别的异常判断结果;和/或,
37、在所述多个分类组别为3组的情况下,在所有所述第二主值中确定出最小的目标第二主值,确定出用于指示所述目标第二主值对应的目标分类组别为异常分类组别的异常判断结果。
38、通过本实施例的方法,提供了一种可以实现确定出异常判断结果的实现方式,并且具有准确度高,且计算简单,可以有效提升处理效率。
39、可选地,如前述的车辆语义定位的修正方法,所述基于所述指定第二主值确定出所述指定分类组别对应的异常判断结果,包括:
40、判断所述指定第二主值是否在预设数值范围内,得到数值大小判断结果;
41、在所述数值大小判断结果指示所述指定第二主值在预设数值范围内的情况下,确定出指示所述指定分类组别为异常分类组别的异常判断结果;
42、在所述数值大小判断结果指示所述指定第二主值不在预设数值范围内的情况下,确定出指示所述指定分类组别为正常分类组别的异常判断结果。
43、通过本实施例的方法,提供了一种能够判断分类组别是否正常的实现方式。
44、可选地,如前述的车辆语义定位的修正方法,所述基于所述异常分类组别完成对所述感知语义信息的修正,包括:
45、在所述感知语义信息中剔除所述异常分类组别中的异常感知车道线点,得到修正后感知语义信息;
46、在所述基于所述异常分类组别完成对所述感知语义信息的修正之后,所述方法还包括:
47、通过将所述地图车道线以及所述修正后感知语义信息进行匹配,得到修正后匹配结果;
48、根据所述修正后匹配结果进行融合定位,得到所述目标车辆在所述当前位置的最终定位结果。
49、通过本实施例的方法,能够基于异常分类组别得到修正后感知语义信息;并且可以基于修正后匹配结果对目标车辆进行定位,得到最终定位结果,从而可以有效提升对目标车辆定位的准确性。
50、根据本技术实施例的又一个方面,还提供了一种车辆语义定位的修正装置,包括:
51、获取模块,用于获取目标车辆在当前位置对应的地图车道线以及感知语义信息,其中,所述感知语义信息包括多个感知车道线点;
52、匹配模块,用于通过将所述地图车道线以及所述多个感知车道线点进行匹配,得到匹配结果;
53、分类模块,用于按照所述匹配结果对所述多个感知车道线点进行分类,得到多个分类组别,其中,每个所述分类组别用于指示根据感知语义信息预识别出的车道线;
54、确定模块,用于在所述多个分类组别大于预设数量的情况下,在所述多个分类组别中确定出异常分类组别;
55、修正模块,用于基于所述异常分类组别完成对所述感知语义信息的修正。
56、根据本技术实施例的又一个方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口和存储器通过通信总线完成相互间的通信;其中,存储器,用于存储计算机程序;处理器,用于通过运行所述存储器上所存储的所述计算机程序来执行上述任一实施例的所述车辆语义定位的修正方法。
57、根据本技术实施例的又一个方面,还提供了一种计算机可读的存储介质,该存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述任一实施例的所述车辆语义定位的修正方法。
58、本发明的有益效果:
59、(1)采用将所述地图车道线以及所述多个感知车道线点进行匹配,得到匹配结果;按照所述匹配结果对所述多个感知车道线点进行分类,得到多个分类组别;并且由于一般情况下车辆左右的车道线数量已知,因此在所述多个分类组别大于已知的预设数量的情况下,在所述多个分类组别中确定出异常分类组别,并且基于所述异常分类组别完成对所述感知语义信息的修正,从而可以达到对感知语义信息进行修正的目的,避免错误感知的车道线对定位造成的影响;从而有利于提升语义定位的准确度;进而可以解决相关技术中存在的准确度低的技术问题;
60、(2)本实施例方法无需添加数据支持,从而也可有效降低计算成本和人工成本;进而可以解决相关技术中存在的车辆语义定位存在计算成本和人工成本高的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!