缺陷检测方法、装置、电子设备和存储介质与流程
本发明涉及图像处理的领域,更具体地涉及一种缺陷检测方法、缺陷检测装置、电子设备和存储介质。
背景技术:
1、随着智能化的快速发展,各行各业对产品质量的要求逐步提高,因此对产品缺陷检测的需求日益增加。例如,伴随集成电路技术的发展,为避免传统封装方式可能会产生的串扰现象,如今大多数的高脚数芯片采用方形扁平无引脚(qfn)封装技术。qfn封装的芯片呈正方形或矩形,芯片底部中央位置有一个大面积裸露焊盘用来导热,围绕大焊盘的封装外围设置有实现电气连结的导电焊盘。但是这类封装的芯片在生产过程中,由于加工工艺等问题,焊盘可能会出现毛刺、破损等缺陷。因此芯片被生产制造出来后,需要在出厂前进行缺陷的检测,以剔除质量有瑕疵的器件。
2、目前大多数的工厂对于产品的缺陷检测还通过人工目视的方式实现。这种检测方式效率低,受主观因素影响大。随着用户对产品品质要求的不断提高以及行业竞争的加剧,传统的这种以人工抽检为主的质量检测手段已经严重制约了企业竞争力的提高,用自动化质量检测设备代替人工是必然趋势。
3、近年来,图像处理技术也有了一定的发展,各种图像处理算法层出不穷,缺陷检测也是图像处理算法的一个比较重要的应用场景。目前已有的基于图像处理的缺陷检测方法在很多方面仍然存在问题。仍以上述qfn封装的芯片为例,已有的缺陷检测方法通常直接对焊盘进行边缘检测、blob分析或者进行焊盘的毛刺、破损缺陷等特定目标的识别。其中,直接进行边缘检测、blob分析的方法检测效果不理想;而目标识别算法存在计算量大、占用资源多、耗时长或者参数调整复杂的问题,并不适用于要实时检测并在短时间内完成计算并输出检测结果的场景。
技术实现思路
1、考虑到上述问题而提出了本发明。
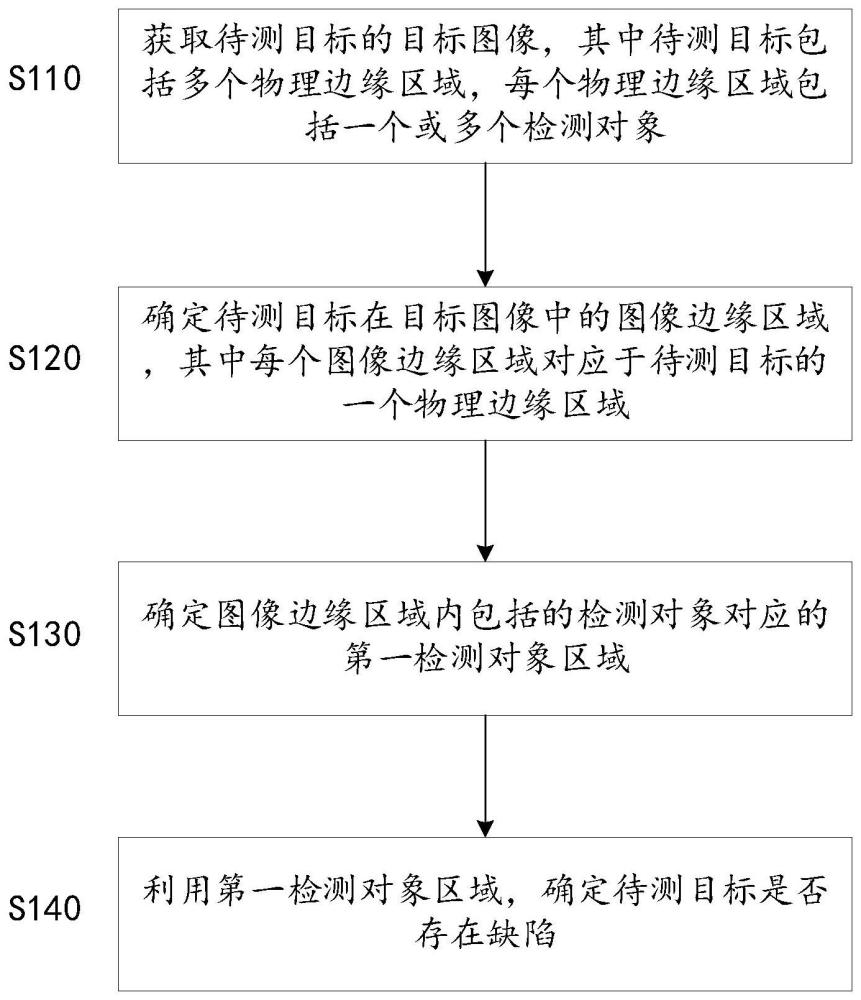
2、根据本发明一个方面,提供了一种缺陷检测方法。方法包括:获取待测目标的目标图像,其中待测目标包括多个物理边缘区域,每个物理边缘区域包括一个或多个检测对象;确定待测目标在目标图像中的图像边缘区域,其中每个图像边缘区域对应于待测目标的一个物理边缘区域;确定图像边缘区域内包括的检测对象对应的第一检测对象区域;利用第一检测对象区域,确定待测目标是否存在缺陷。
3、示例性地,确定待测目标在目标图像中的图像边缘区域,包括:利用模板图像中的模板区域,确定目标图像中的感兴趣区域;对感兴趣区域进行图像分割,以确定感兴趣区域中的检测对象;根据感兴趣区域中的检测对象,确定图像边缘区域。
4、示例性地,利用模板图像中的模板区域,确定目标图像中的感兴趣区域,包括:基于待测目标的形状匹配,确定目标图像和模板图像之间的偏移量;根据偏移量,调整模板图像的模板区域,以将目标图像中的、与经调整的模板区域位置对应的区域作为感兴趣区域。
5、示例性地,利用第一检测对象区域,确定待测目标是否存在缺陷,包括:针对每个第一检测对象区域,确定该第一检测对象区域的最小外接矩形;确定最小外接矩形的中心坐标和宽度;根据最小外接矩形的宽度,在最小外接矩形的中心处确定扫描矩形,其中,扫描矩形的长度等于最小外接矩形的宽度与预设尺寸的和;利用扫描矩形,确定该第一检测对象区域中的检测对象的宽度;根据所确定的检测对象的宽度以及预设标准宽度,确定该第一检测对象区域内的检测对象是否存在缺陷,以确定待测目标是否存在缺陷。
6、示例性地,利用扫描矩形,确定该第一检测对象区域中的检测对象的宽度,包括:对于扫描矩形所包括的、检测对象的至少一行像素,确定任意两个相邻像素之间的灰度值的差值;根据相邻像素之间的灰度值的差值,确定第一像素和第二像素之间的距离,其中,第一像素是其相邻的前一个像素与该像素的灰度值的差值小于第一差值阈值的像素,第二像素是与其相邻的后一个像素的灰度值的差值大于第二差值阈值的像素,第一差值阈值是小于0的整数,第二差值阈值是大于0的整数;根据第一像素和第二像素之间的距离,确定该第一检测对象区域中的检测对象的宽度。
7、示例性地,利用第一检测对象区域,确定待测目标是否存在缺陷,包括:利用第一检测对象区域,确定第一检测对象区域的等宽参考区域;对每个第一检测对象区域进行形态学处理,以获得每个第一检测对象区域所对应的第二检测对象区域;利用等宽参考区域、第一检测对象区域和第二检测对象区域,确定待测目标是否存在缺陷。
8、示例性地,形态学处理包括:开运算;利用等宽参考区域、第一检测对象区域和第二检测对象区域,确定待测目标是否存在缺陷,包括:将第一检测对象区域与第二检测对象区域执行差运算,以获取第一差值区域;将第一差值区域与等宽参考区域执行差运算,以获得毛刺区域;根据毛刺区域,确定待测目标是否存在缺陷。
9、示例性地,形态学处理包括:闭运算;利用等宽参考区域、第一检测对象区域和第二检测对象区域,确定待测目标是否存在缺陷,包括:将第二检测对象区域与第一检测对象区域执行差运算,以获取第二差值区域;确定第二差值区域与等宽参考区域的交集部分,以获得破损区域;根据破损区域,确定待测目标是否存在缺陷。
10、根据本发明又一个方面,还提供了一种缺陷检测装置,包括:
11、获取模块,用于获取待测目标的目标图像,其中待测目标包括多个物理边缘区域,每个物理边缘区域包括一个或多个检测对象;
12、第一确定模块,用于确定待测目标在目标图像中的图像边缘区域,其中每个图像边缘区域对应于待测目标的一个物理边缘区域;
13、第二确定模块,用于确定图像边缘区域内包括的检测对象对应的第一检测对象区域;
14、第三确定模块,用于利用第一检测对象区域,确定待测目标是否存在缺陷。
15、根据本发明又一个方面,还提供了一种电子设备,包括处理器和存储器,存储器中存储有计算机程序指令,计算机程序指令被处理器运行时用于执行上述的缺陷检测方法。
16、根据本发明再一个方面,还提供了一种存储介质,在存储介质上存储了程序指令,程序指令在运行时用于执行上述的缺陷检测方法
17、在上述技术方案中,在待测目标的目标图像中的、包括检测对象的各个边缘中,分别确定检测对象所占的第一检测对象区域,并且根据第一检测对象区域确定待测目标是否存在缺陷。该方案能够有效避免待测目标的形状对于缺陷检测结果的影响,保证了无论待测目标是任何形状,均能够准确地检测待测目标的缺陷。此外,上述技术方案中不涉及复杂的图像处理算法,计算效率较高,节省计算资源,能够适用于高通量要求的场景。
18、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种缺陷检测方法,其特征在于,包括:
2.根据权利要求1所述缺陷检测方法,其特征在于,所述确定所述待测目标在所述目标图像中的图像边缘区域,包括:
3.根据权利要求2所述缺陷检测方法,其特征在于,所述利用模板图像中的模板区域,确定所述目标图像中的感兴趣区域,包括:
4.根据权利要求1所述缺陷检测方法,其特征在于,所述利用所述第一检测对象区域,确定所述待测目标是否存在缺陷,包括:
5.根据权利要求4所述缺陷检测方法,其特征在于,所述利用所述扫描矩形,确定该第一检测对象区域中的检测对象的宽度,包括:
6.根据权利要求1至5任一项所述缺陷检测方法,其特征在于,所述利用所述第一检测对象区域,确定所述待测目标是否存在缺陷,包括:
7.根据权利要求6所述缺陷检测方法,其特征在于,所述形态学处理包括:开运算;
8.根据权利要求6所述缺陷检测方法,其特征在于,所述形态学处理包括:闭运算;
9.一种缺陷检测装置,其特征在于,包括:
10.一种电子设备,包括处理器和存储器,其特征在于,所述存储器中存储有计算机程序指令,所述计算机程序指令被所述处理器运行时用于执行如权利要求1至8任一项所述的缺陷检测方法。
11.一种存储介质,在所述存储介质上存储了程序指令,其特征在于,所述程序指令在运行时用于执行如权利要求1至8任一项所述的缺陷检测方法。
技术总结
本发明提供了一种缺陷检测方法、装置、电子设备和存储介质。该包括:获取待测目标的目标图像,其中所述待测目标包括多个物理边缘区域,每个物理边缘区域包括一个或多个检测对象;确定所述待测目标在所述目标图像中的图像边缘区域,其中每个图像边缘区域对应于所述待测目标的一个物理边缘区域;确定所述图像边缘区域内包括的检测对象对应的第一检测对象区域;利用所述第一检测对象区域,确定所述待测目标是否存在缺陷。该发明能够有效避免待测目标的形状对于缺陷检测结果的影响,保证了无论待测目标是任何形状,均能够准确地检测待测目标的缺陷,计算效率较高,节省计算资源,能够适用于高通量要求的场景。
技术研发人员:王硕,董其波
受保护的技术使用者:苏州镁伽科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!