基于机器视觉与激光雷达的集装箱洗消方法、系统及介质与流程
本发明涉及集装箱洗消,具体涉及一种基于机器视觉与激光雷达的集装箱洗消方法、系统及介质。
背景技术:
1、由于航运行业的特殊性,船只常往返于境内外,存在携带病毒、细菌、害虫及其他可能破坏环境或影响人员健康的生物,因此需对集装箱进行洗消。集装箱洗消是针对集装箱进行清洁和消毒的过程,通过集装箱的有效洗消,可以保障集装箱内部不会传播疾病、害虫和其他有害物质。
2、目前,集装箱洗消主要通过人工洗消、机械洗消以及机器人洗消来完成,但是上述的三种洗消方式均在局部洗消不到位以及洗消效果无法进行确认的问题。
3、现有公开号为cn112190742a的中国专利,公开了一种洗消系统,包括相邻设置的第一集装箱和第二集装箱,第一集装箱内依次设置有喷雾压制消毒模块、洗涤消毒模块以及污水处理模块,第二集装箱内依次设置有烘干模块和熏蒸灭菌模块,喷雾压制消毒模块能够对可重复用的医疗用品进行过氧化氢喷雾压制消毒处理,洗涤消毒模块能够对经喷雾压制消毒处理后的医疗用品在负压环境下进行洗涤消毒处理,烘干模块能够对经洗涤消毒处理后的医疗用品进行烘干处理,熏蒸灭菌模块能够对经烘干处理的医疗用品进行过氧化氢熏蒸消毒处理,污水处理模块能够对喷雾压制消毒模块、洗涤消毒模块以及熏蒸灭菌模块产生的污水进行处理。但是公开号为cn112190742a的中国专利主要涉及洗消过程的通用模块设置,并无法解决上述存在的局部洗消不到位以及洗消效果无法确认的问题。
技术实现思路
1、本发明解决了传统的集装箱洗消方式存在局部洗消不到位以及洗消效果无法进行确认的问题,提出一种基于机器视觉与激光雷达的集装箱洗消方法、系统及介质,采用机器视觉和激光扫描技术,通过对集装箱的点云数据以及图像的识别和分析,能够有效且准确的判断为污渍所在位置以及污渍的特征,且在洗消完成后,能够对洗消效果进行验证;本发明能够针对性的完成洗消,确保局部洗消到位以及保证良好的洗消效果。
2、为了实现上述目的,本发明采用以下技术方案:一种基于机器视觉与激光雷达的集装箱洗消方法,包括以下步骤
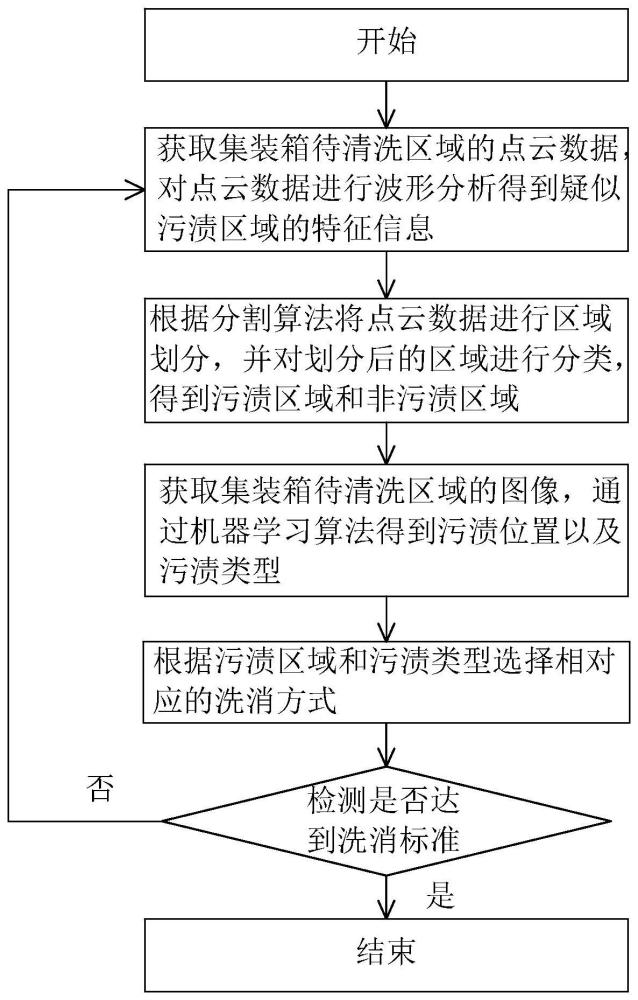
3、s1,获取集装箱待清洗区域的点云数据,对点云数据进行波形分析得到疑似污渍区域的特征信息;
4、s2,根据分割算法将点云数据进行区域划分,并对划分后的区域进行分类,得到污渍区域和非污渍区域;
5、s3,获取集装箱待清洗区域的图像,通过机器学习算法得到污渍位置以及污渍类型,并进行污渍区域确认;
6、s4,根据污渍区域和污渍类型选择相对应的洗消方式,在完成洗消后重复s1至s3,检测是否达到洗消标准。
7、本技术方案中,首先通过激光雷达获取相应的待清洗区域的点云数据,根据对点云数据的波形分析来得到关于疑似污渍区域的特征信息,此处的特征信息主要为几何结构特征信息;随后通过分割算法得到划分后的区域,在对每个区域进行分类值周,得到相应的污渍区域以及非污渍区域;然后通过高清摄像头获取符合要求的图像,并通过机器学习算法建立相应的模型来识别得到污渍位置以及污渍类型;最后,根据步骤s1至步骤s3的结果来进行针对性洗消,洗消完成后,重复步骤s1至s2来进行洗消效果检测,判断是否达标;本发明的方法能够针对性的完成洗消,确保局部洗消到位。
8、本发明还进一步设置为:所述步骤s1包括:
9、s11,根据激光雷达采集关于集装箱待清洗区域的点云数据;
10、s12,通过分析点云数据的表面反射率和散射特征,根据污渍与集装箱表面的区别,识别待清洗区域的表面材质和颜色;
11、s13,提取出疑似污渍区域的几何结构信息。
12、本技术方案中,待清洗区域包括有一个较大的区域,所有的污渍部分均包含在其内部,根据采集得到点云数据来识别得到待清洗区域的表面材质以及颜色信息,根据这些信息能够初步判断出待清洗区域的疑似污渍区域,随后又根据提取出疑似污渍部分的一系列几何结构信息,便于下一步污渍区域的定位。
13、本发明还进一步设置为:所述步骤s2包括:
14、s21,采用mean-shift聚类算法将具备类似特征的点云数据进行归集,划分成不同的若干个区域;
15、s22,采用机器学习算法构建污渍区域分类模型,对每个区域进行分类,区分出污渍区域和非污渍区域。
16、本技术方案中,mean-shift聚类算法通过计算滑动窗口中的均值来更新中心点的候选框,以此达到找到每个簇中心点的目的;随后,对这些候选窗口进行滤波以消除近似或重复的窗口,找到最终的中心点及其对应的簇;通过聚类算法来进行区域划分;随后建立相应的污渍区域分类模型,通过输入相应的点云数据特征来对划分后的每个区域进行再分类,准确地识别和定位出污渍区域。
17、本发明还进一步设置为:所述步骤s3包括:
18、s31,采用高清摄像头获取集装箱内外的图像信息,并对图像信息进行增强处理;
19、s32,基于随机森林算法构建图像污渍识别模型,输出污渍的位置以及类型。
20、本技术方案中,通过安装在集装箱内部或者洗消机器人上的高清摄像头来进行图像采集,在完成采集之后对图像进行处理和分析;随后通过由大量污渍样本数据训练得到图像污渍识别模型,输出污渍的位置以及类型,以得到更为精确的判断结果。
21、本发明还进一步设置为:所述污渍区域确认步骤具体为:
22、在分类结果的基础上,对污渍区域进行图像识别,根据图像污渍识别模型的输出结果来确定在分类结果得到的污渍区域是否为最终的污渍区域;若是,则输出污渍区域,若否,则返回s1。
23、本技术方案中,在步骤s2的基础上,借助步骤s3对污渍区域进行识别验证,即根据由图像识别输出的结果来对步骤s2得到的污渍区域进行验证,若验证结果无误则输出污渍区域,以保证最终确定的污渍区域的准确性。
24、本发明还进一步设置为:所述步骤s3还包括:
25、采用sobel算子对污渍区域的边缘进行增强处理,增加污渍区域边缘的对比度,获取更为清晰的边缘信息。
26、本技术方案中,也可选用canny算子以及laplacian算子进行增强处理。
27、本发明还进一步设置为:所述步骤s4包括:
28、对确定的污渍区域进行重点清洗,根据具体的污渍类型选择对应的清洗方式;
29、完成洗消后进行洗消效果检测,判断污渍是否去除以及是否符合洗消标准。
30、本技术方案中,采用机械设备或者洗消机器人来对判定为污渍区域的部分进行重点清洗,并根据对应的污渍类型选择相适配的清洗方式;此外,在洗消之后进行效果检测,即重复步骤s1至步骤s3的步骤来进行确认,确保污渍的完全清除。
31、本发明还进一步设置为:还包括环境监测步骤:
32、在洗消效果检测之后,通过相应的环境检测传感器来监测集装箱内的环境变量,通过比较该环境变量与点云数据获取之前的环境变量,来确定集装箱环境变量是否达标,若是,则结束洗消。
33、本技术方案中,通过相应的环境传感器,例如,温度传感器、湿度传感器以及气体传感器,来分析集装箱内的实时环境状况,通过分析其洗消前后的实时环境状况,来确定洗消是否完成,保证集装箱内保持干燥以及温度适宜。
34、一种基于机器视觉与激光雷达的集装箱洗消系统,使用上述的基于机器视觉与激光雷达的集装箱洗消方法,包括:
35、点云数据处理模块,根据点云数据的分析结果进行区域的划分和分类;
36、图像分析模块,将采集得到的图像经过处理后输入至图像污渍识别模型,得到污渍位置以及污渍类型;
37、洗消交互控制模块,根据点云数据处理模块和图像分析模块的结果来进行关于重点清洗以及清洗方式的选择;
38、环境监测模块,监测集装箱内的环境变量。
39、本技术方案中,洗消交互控制模块分别与点云数据处理模块和图像分析模块连接,环境监测模块也与洗消交互控制模块连接;根据点云数据处理模块和图像分析模块的结果来进行洗消控制,确保洗消的顺利进行;此外,在洗消过程中,环境监测模块也持续工作,实时检测温度以及湿度的参数,确保高温洗消达标以及洗消干燥后湿度达标。
40、一种介质,所述介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述的基于机器视觉与激光雷达的集装箱洗消方法的步骤。
41、本技术方案中,在计算机程序运行时,能够执行上述方法的内容。
42、本发明能够带来如下的有益效果:
43、1、本发明涉及的一种基于机器视觉与激光雷达的集装箱洗消方法,采用机器视觉和激光扫描技术,通过对集装箱的点云数据以及图像的识别和分析,能够有效且准确的判断为污渍所在位置以及污渍的特征,且在洗消完成后,能够对洗消效果进行验证;
44、2、本发明涉及的一种基于机器视觉与激光雷达的集装箱洗消方法,能够针对性的完成洗消,确保局部洗消到位,对污渍区域能够实现精准洗消;同时,避免了大面积强力洗消,对重点部位和污渍区域有针对性的洗消能够避免洗消资源如水和消毒剂的浪费问题;
45、3、本发明涉及的一种基于机器视觉与激光雷达的集装箱洗消方法,还能够对洗消效果进行检测,确保达到洗消标准;
46、4、本发明涉及的一种基于机器视觉与激光雷达的集装箱洗消系统,其中的环境监测模块能够对集装箱环境进行全程监测,防止温度或者气压过高带来的隐患和风险。
- 还没有人留言评论。精彩留言会获得点赞!