车牌识别方法、装置、设备及存储介质与流程
本申请属于图像识别领域,尤其涉及一种车牌识别方法、装置、设备及存储介质。
背景技术:
1、车底检测机器人用于对车辆底盘进行安全检查,具有体积小、可伸缩、方便携带、检测范围广、环境适应能力强、传输画面清晰等特点。
2、车底检测机器人在对车辆底盘进行检查时可以拍摄车牌图像,用于进行车牌识别,但是由于车底检测机器人紧贴地面,安装在其上的车牌识别摄像头拍摄仰角较大,视角倾斜,使车牌检测和识别准确率降低;且本身摄像头可能为广角摄像头,有一定畸变,所以采集到的图像直接用于车牌识别识别准确率较低,使用效果较差。
技术实现思路
1、本申请实施例提供一种车牌识别方法、装置、设备及存储介质,能够提高车牌识别准确率。
2、第一方面,本申请实施例提供了一种车牌识别方法,方法包括:
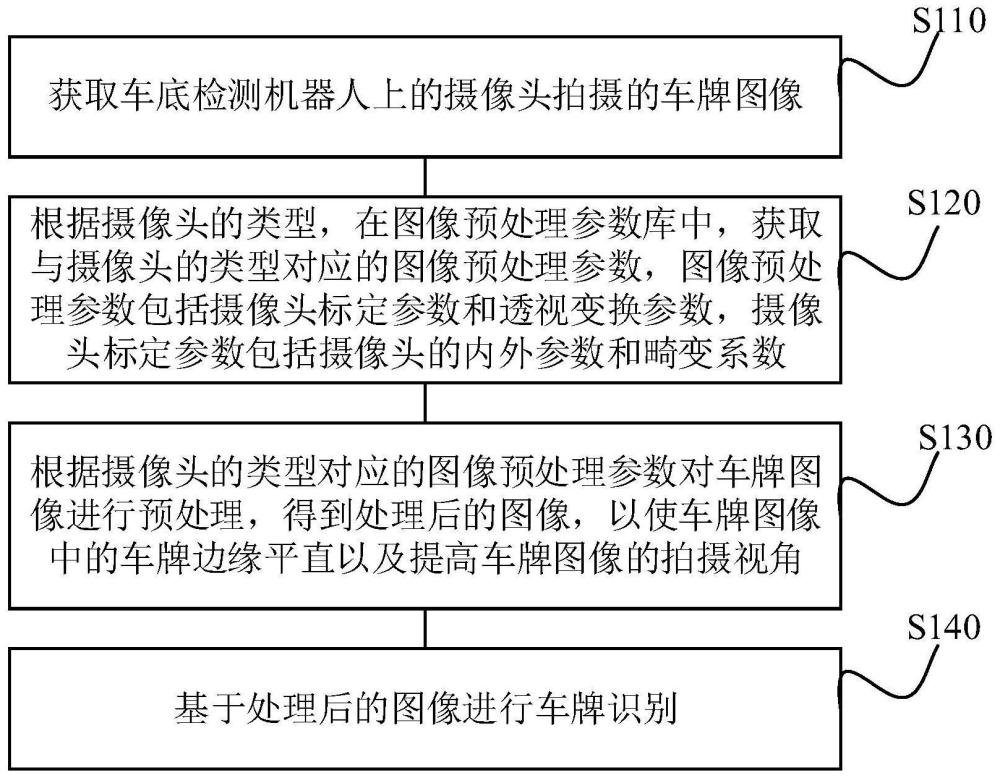
3、获取车底检测机器人上的摄像头拍摄的车牌图像;
4、根据摄像头的类型,在图像预处理参数库中,获取与摄像头的类型对应的图像预处理参数,图像预处理参数包括摄像头标定参数和透视变换参数,摄像头标定参数包括摄像头的内外参数和畸变系数;
5、根据摄像头的类型对应的图像预处理参数对车牌图像进行预处理,得到处理后的图像,以使车牌图像中的车牌边缘平直以及提高车牌图像的拍摄视角;
6、基于处理后的图像进行车牌识别;
7、其中,图像预处理参数库包括多种类型的摄像头各自对应的图像预处理参数。
8、在本申请的一些实施例中,根据摄像头的类型对应的图像预处理参数对车牌图像进行预处理,得到预处理后的图像,包括:
9、根据摄像头标定参数对车牌图像进行处理,得到第一车牌图像;
10、根据透视变换参数对第一车牌图像进行处理,得到第二车牌图像;
11、将第二车牌图像确定为预处理后的图像。
12、在本申请的一些实施例中,根据透视变换参数对第一车牌图像进行处理,得到第二车牌图像,包括:
13、根据透视变换参数,提高第一车牌图像的拍摄视角,得到第二车牌图像。
14、在本申请的一些实施例中,在获取车底机器人上的摄像头拍摄的车牌图像之前,方法还包括:
15、针对多种类型的摄像头中的每种类型的摄像头,根据预设标定方法对摄像头进行标定,得到摄像头对应的摄像头标定参数,摄像头是安装在车底检测机器人上的摄像头;
16、利用摄像头拍摄车牌图像,得到多张第三车牌图像;
17、根据摄像头标定参数对多张第三车牌图像进行处理,得到多张第四车牌图像;
18、对多张第四车牌图像进行透视变换处理,以提高车牌图像的拍摄视角,并得到对应的透视变换参数;
19、根据多种类型的摄像头对应的摄像头标定参数和透视变换参数,生成图像预处理参数库。
20、在本申请的一些实施例中,预设标定方法包括张氏标定法、tsai两步法、基于主动视觉的相机标定法以及分层逐步标定法中的任意一种。
21、在本申请的一些实施例中,多种类型的摄像头包括远摄摄像头、标准摄像头、广角摄像头、超广角摄像头以及鱼眼摄像头中的多种。
22、第二方面,本申请实施例提供了一种车牌识别装置,装置包括:
23、第一获取模块,用于获取车底检测机器人上的摄像头拍摄的车牌图像;
24、第二获取模块,用于根据摄像头的类型,在图像预处理参数库中,获取与摄像头的类型对应的图像预处理参数,图像预处理参数包括摄像头标定参数和透视变换参数,摄像头标定参数包括摄像头的内外参数和畸变系数;
25、预处理模块,用于根据摄像头的类型对应的图像预处理参数对车牌图像进行预处理,得到预处理后的图像,以使车牌图像中的车牌边缘平直以及提高车牌图像的拍摄视角;
26、识别模块,用于基于处理后的图像进行车牌识别;
27、其中,图像预处理参数库包括多种类型的摄像头各自对应的图像预处理参数。
28、在本申请的一些实施例中,预处理模块,包括:
29、第一预处理模块,用于根据摄像头标定参数对车牌图像进行处理,得到第一车牌图像;
30、第二预处理模块,用于根据透视变换参数对第一车牌图像进行处理,得到第二车牌图像;
31、确定模块,用于将第二车牌图像确定为预处理后的图像。
32、第三方面,本申请实施例提供一种车牌识别设备,车牌识别设备包括:处理器以及存储有计算机程序指令的存储器;
33、处理器执行计算机程序指令时实现上述任一实施例的车牌识别方法。
34、第四方面,本申请实施例提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序指令,计算机程序指令被处理器执行时实现上述任一实施例的车牌识别方法。
35、根据本申请实施例的车牌识别方法、装置、设备及存储介质,由于图像预处理参数库包括多种类型的摄像头各自对应的图像预处理参数,故可以根据图像预处理参数库快速获得目标类型摄像头的图像预处理参数,并根据图像预处理参数对车牌图像进行预处理,预处理处理后的车牌图像消除了摄像头和拍摄角度的因素带来的影响,基于预处理后的车牌图像进行车牌识别可以提高车牌识别准确率。
技术特征:
1.一种车牌识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述摄像头的类型对应的图像预处理参数对所述车牌图像进行预处理,得到预处理后的图像,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述透视变换参数对所述第一车牌图像进行处理,得到第二车牌图像,包括:
4.根据权利要求2所述的方法,其特征在于,在所述获取车底机器人上的摄像头拍摄的车牌图像之前,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述预设标定方法包括张氏标定法、tsai两步法、基于主动视觉的相机标定法以及分层逐步标定法中的任意一种。
6.根据权利要求1所述的方法,其特征在于,所述多种类型的摄像头包括远摄摄像头、标准摄像头、广角摄像头、超广角摄像头以及鱼眼摄像头中的多种。
7.一种车牌识别装置,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述预处理模块,包括:
9.一种车牌识别设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1至6中任意一项所述的车牌识别方法。
技术总结
本申请公开了一种车牌识别方法、装置、设备及存储介质,应用于图像识别领域。车牌识别方法包括:获取车底检测机器人上的摄像头拍摄的车牌图像;根据摄像头的类型,在图像预处理参数库中,获取与摄像头的类型对应的图像预处理参数,图像预处理参数包括摄像头标定参数和透视变换参数,摄像头标定参数包括摄像头的内外参数和畸变系数;根据摄像头的类型对应的图像预处理参数对车牌图像进行预处理,得到处理后的图像,以使车牌图像中的车牌边缘平直以及提高车牌图像的拍摄视角;基于处理后的图像进行车牌识别;其中,图像预处理参数库包括多种类型的摄像头各自对应的图像预处理参数。能够提高车牌识别准确率。
技术研发人员:陈志强,崔锦,王虹,彭志,赵延平,张宇哲,黄玲
受保护的技术使用者:同方威视技术股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!