一种自动化运维方法、系统、电子设备及存储介质与流程
本发明涉及运维,更具体地说,涉及一种自动化运维方法、系统、电子设备及存储介质。
背景技术:
1、随着计算机技术的快速发展,目前的数据中心具备设备海量、分层云化、机房多、多地中心分布等特点,相应的,对数据中心的运维业务的自动化、智能化等要求也越来越高和越来越重视。其中,自动化运维主要为管理编排、自动化任务调度等等。
2、目前的自动化任务调度方式主要为完全共享模式、按照任务或者领域完成分割的模式、按照调用方提供的优先级、独占模式参数的方式等等。由此可见,目前的自动化任务调度方式基本都依赖预设方案进行调度,不够智能,容易影响任务调度的整体性和协同性,并且自动化任务调度效率低。
技术实现思路
1、有鉴于此,本发明提供一种自动化运维方法、系统、电子设备及存储介质,以解决现有技术中,依赖预设方案进行调度,不够智能,容易影响任务调度的整体性和协同性,并且自动化任务调度效率低的问题。
2、本发明第一方面提供一种自动化运维方法,应用于自动化运维系统,所述方法包括:
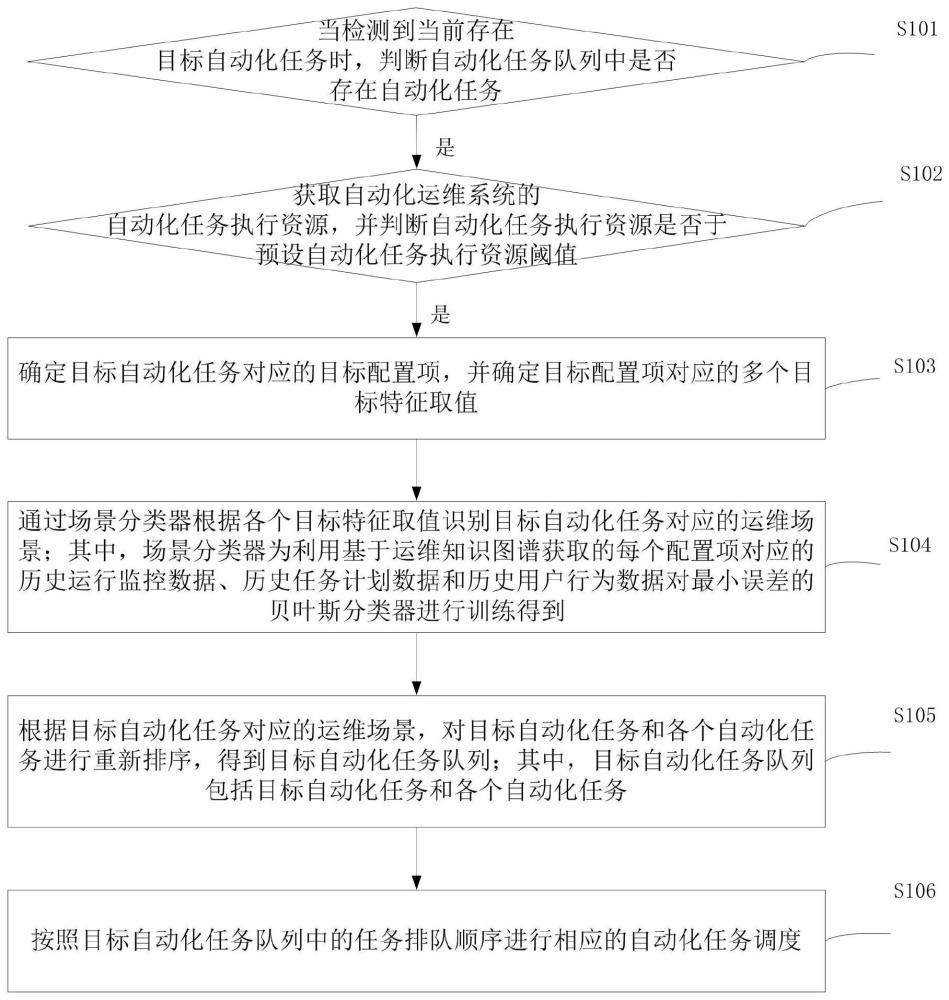
3、当检测到当前存在目标自动化任务时,判断自动化任务队列中是否存在自动化任务;
4、若所述自动化任务队列中存在自动化任务,获取所述自动化运维系统的自动化任务执行资源;
5、若所述自动化任务执行资源小于预设自动化任务执行资源阈值,确定所述目标自动化任务对应的目标配置项,并确定所述目标配置项对应的多个目标特征取值;
6、通过场景分类器根据各个所述目标特征取值识别所述目标自动化任务对应的运维场景;其中,所述场景分类器为利用基于运维知识图谱获取的每个配置项对应的历史运行监控数据、历史任务计划数据和历史用户行为数据对最小误差的贝叶斯分类器进行训练得到;
7、根据所述目标自动化任务对应的运维场景,对所述目标自动化任务和各个自动化任务进行重新排序,得到目标自动化任务队列;其中,所述目标自动化任务队列包括所述目标自动化任务和各个自动化任务;
8、按照所述目标自动化任务队列中的任务排队顺序进行相应的自动化任务调度。
9、可选的,所述利用基于运维知识图谱获取的每个配置项对应的历史运行监控数据、历史任务计划数据和历史用户行为数据对最小误差的贝叶斯分类器进行训练,得到场景分类器,包括:
10、根据运维知识图谱从运维平台上获取每个配置项对应的历史运行监控数据、历史任务计划数据和历史用户行为数据;
11、从每个所述配置项相应对应的历史运行监控数据中提取每个所述配置项的系统运行特征,从每个所述配置项的历史任务计划数据中提取每个所述配置项的任务计划特征,从每个所述配置项的历史用户行为数据中提取每个所述配置项的用户行为特征;
12、利用每个所述配置项的系统运行特征、任务计划特征和用户行为特征,对最小误差的贝叶斯分类器进行训练,得到相应的场景分类器。
13、可选的,所述利用每个所述配置项的系统运行特征、任务计划特征和用户行为特征,对最小误差的贝叶斯分类器进行训练,得到相应的场景分类器,包括:
14、针对每个所述配置项,对所述配置项的系统运行特征、任务计划特征和用户行为特征进行离散化处理,得到所述配置项的多个特征取值;
15、将所述配置项的每个特征取值输入最小误差的贝叶斯分类器,使所述最小误差的贝叶斯分类器确定所述配置项的每个特征取值对应的场景概率,根据所述配置项的特征取值对应的场景概率对最小误差的贝叶斯分类器中的参数进行训练,直至所述最小误差的贝叶斯分类器达到收敛,得到场景分类器;
16、其中,所述配置项对应的目标场景概率为所述配置项对应的各个特征取值的场景概率中概率值最大的场景概率。
17、可选的,所述若所述自动化任务执行资源小于预设自动化任务执行资源阈值,确定所述目标自动化任务对应的目标配置项,并确定所述目标配置项对应的多个目标特征取值,包括:
18、若所述自动化任务执行资源小于预设自动化任务执行资源阈值,确定所述目标自动化任务对应的目标配置项;
19、根据所述运维知识图谱获取所述目标配置项的当前运行监控数据、当前任务计划数据和当前用户行为数据;
20、从所述当前运行监控数据中提取所述目标配置项的系统运行特征,从所述当前任务计划数据中提取所述目标配置项的任务计划特征,从所述当前用户行为数据中提取所述目标配置项的用户行为特征;
21、对述目标配置项的系统运行特征、任务计划特征和用户行为离散化处理,得到所述目标配置项的多个目标特征取值。
22、可选的,所述通过场景分类器根据各个所述目标特征取值识别所述目标自动化任务对应的运维场景,包括:
23、将各个所述目标特征取值输入场景分类器中,使所述场景分类器确定每个所述目标特征取值对应的目标场景概率,并将各个所述目标场景概率中概率值最大的目标场景概率对应的运维场景确定为所述目标自动化任务对应的运维场景。
24、可选的,根据所述目标自动化任务对应的运维场景,对所述目标自动化任务和各个自动化任务进行重新排序,得到目标自动化任务队列,包括:
25、获取每个自动化任务对应的运维场景,并根据每个所述自动化任务的运维场景和所述目标自动化任务对应的运维场景的优先级,对所述目标自动化任务和各个自动化任务进行重新排序,得到目标自动化任务队列。
26、可选的,所述方法还包括:
27、若所述自动化任务执行资源大于所述预设自动化任务执行资源阈值,根据所述自动化任务队列中的各个自动化任务的执行时间,计算所述目标自动化任务的排队等待时间;
28、若所述排队等待时间小于等待时间阈值,或所述自动化任务队列中不存在自动化任务,确定所述目标自动化任务的任务类型;
29、根据所述目标自动化任务的任务类型和各个自动化任务的任务类型,对所述目标自动化任务和各个所述自动化任务进行重新排序,得到目标自动化任务队列;
30、若所述排队等待时间不小于等待时间阈值,确定所述目标自动化任务的任务类型和领域;
31、根据所述目标自动化任务的任务类型和领域,以及各个自动化任务的任务类型和领域,对所述目标自动化任务和各个所述自动化任务进行重新排序,得到目标自动化任务队列。
32、本发明第二方面提供一种自动化运维系统,所述系统包括:
33、场景感知模块,用于当检测到当前存在目标自动化任务时,判断自动化任务队列中是否存在自动化任务;若所述自动化任务队列中存在自动化任务,获取所述自动化运维系统的自动化任务执行资源;若所述自动化任务执行资源小于预设自动化任务执行资源阈值,确定所述目标自动化任务对应的目标配置项,并确定所述目标配置项对应的多个目标特征取值;通过场景分类器根据各个所述目标特征取值识别所述目标自动化任务对应的运维场景;其中,所述场景分类器为训练单元利用基于运维知识图谱获取的每个配置项对应的历史运行监控数据、历史任务计划数据和历史用户行为数据对最小误差的贝叶斯分类器进行训练得到;
34、自动化任务调度模块,用于根据所述目标自动化任务对应的运维场景,对所述目标自动化任务和各个自动化任务进行重新排序,得到目标自动化任务队列;其中,所述目标自动化任务队列包括所述目标自动化任务和各个自动化任务;
35、自动化任务执行模块,用于按照所述目标自动化任务队列中的任务排队顺序进行相应的自动化任务调度。
36、本发明第三方面提供一种电子设备,包括:处理器以及存储器,所述处理器以及存储器通过通信总线相连;其中,所述处理器,用于调用并执行所述存储器中存储的程序;所述存储器,用于存储程序,所述程序用于实现如本发明第一方面提供的自动化运维方法。
37、本发明第四方面提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令用于执行如本发明第一方面提供的自动化运维方法。
38、本发明提供一种自动化运维方法、系统、电子设备及存储介质,当检测到当前存在目标自动化任务时,判断自动化任务队列中是否存在自动化任务;若自动化任务队列中存在自动化任务,根据自动化任务队列中的各个自动化任务的执行时间,计算目标自动化任务的排队等待时间;若排队等待时间大于第一等待时间阈值,确定目标自动化任务对应的目标配置项,并确定目标配置项对应的多个目标特征取值;通过场景分类器根据各个目标特征取值识别目标自动化任务对应的运维场景;其中,场景分类器为利用基于运维知识图谱获取的每个配置项对应的历史运行监控数据、历史任务计划数据和历史用户行为数据对最小误差的贝叶斯分类器进行训练得到;根据目标自动化任务对应的运维场景,对目标自动化任务和各个自动化任务进行重新排序,得到目标自动化任务队列;其中,目标自动化任务队列包括目标自动化任务和各个自动化任务;按照目标自动化任务队列中的任务排队顺序进行相应的自动化任务调度。本发明提供的技术方案,预先利用基于运维知识图谱获取的每个配置项对应的历史运行监控数据、历史任务计划数据和历史用户行为数据对最小误差的贝叶斯分类器进行训练得到场景分类器,以便在确定目标自动化任务的排队等待时间较长的情况下,通过场景分类器识别出目标自动化任务的运维场景,以便根据目标自动化任务的运维场景对目标自动化任务和各个自动化任务进行重新排序,由此可见,本发明通过运维场景打破领域、任务规则、以及通过运维场景串联了所有自动化任务,不仅提高了自动化任务调度的效率,还解决了运维场景紧急和重要资源需求的问题,同时避免依赖预设方案进行调度,影响任务调度的整体性和协同性。
- 还没有人留言评论。精彩留言会获得点赞!