基于预期功能安全的智能驾驶系统架构的搭建方法及系统与流程
本技术预期功能安全的,尤其涉及一种基于预期功能安全的智能驾驶系统架构的搭建方法及系统。
背景技术:
1、随着智能驾驶技术的发展,对道路上自动驾驶车辆的安全性要求也越来越全面和具体。道路车辆可接受的安全级别除了信息安全和功能安全之外,还应满足预期功能安全(safety of the intended functionality,简称sotif)的要求。
2、现有技术中,缺少基于预期功能安全的系统架构搭建的完整的系统流程,对于预期功能安全的危害因素分析和处理的逻辑混乱,现有技术无法有效实现基于预期功能安全的智能驾驶架构搭建和实施。
技术实现思路
1、本技术提供一种基于预期功能安全的智能驾驶系统架构的搭建方法及系统,用以解决现有技术中缺少基于预期功能安全的系统架构搭建的完整的系统流程,对于预期功能安全的危害因素分析和处理的逻辑混乱,无法有效实现基于预期功能安全的智能驾驶架构搭建和实施的技术问题。
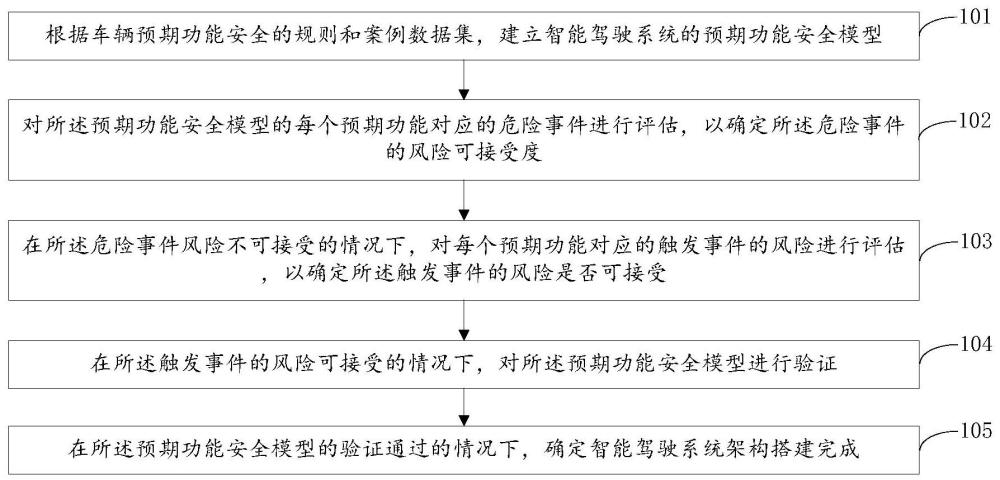
2、根据本技术的第一方面,提供一种基于预期功能安全的智能驾驶系统架构的搭建方法,包括:根据车辆预期功能安全的规则和案例数据集,建立智能驾驶系统的预期功能安全模型;对所述预期功能安全模型的每个预期功能对应的危险事件进行评估,以确定所述危险事件的风险可接受度;在所述危险事件风险不可接受的情况下,对每个预期功能对应的触发事件的风险进行评估,以确定所述触发事件的风险是否可接受;在所述触发事件的风险可接受的情况下,对所述预期功能安全模型进行验证;在所述预期功能安全模型的验证通过的情况下,确定智能驾驶系统架构搭建完成。
3、在一些实施方式中,所述对所述预期功能安全模型的每个预期功能对应的危险事件进行评估,以确定所述危险事件的风险可接受度,包括:识别每个预期功能对应的触发事件的风险,以确定每个预期功能潜在的危险事件;对潜在的所述危险事件进行危险程度评估,以确定所述危险事件的风险可接受度。
4、在一些实施方式中,所述触发事件的风险包括由系统内部结构引起的第一触发事件的风险以及由环境条件和可预见的误用引起的第二触发事件的风险,所述在所述危险事件风险不可接受的情况下,对每个预期功能对应的触发事件的风险进行评估,以确定所述触发事件的风险是否可接受,包括:对所述第一触发事件的风险进行评估,以确定所述第一触发事件的风险是否可接受;对所述第二触发事件的风险进行评估,以确定所述第二触发事件的风险是否可接受;在所述第一触发事件的风险和所述第二触发事件的风险均可接受的情况下,确定所述触发事件的风险可接受;在所述第一触发事件的风险和所述第二触发事件的风险中的至少一者不可接受的情况下,确定所述触发事件的风险不可接受。
5、在一些实施方式中,所述预期功能安全模型包括系统组件模型和算法模型,所述第一触发事件的风险包括与所述系统组件模型对应的第一类事件和与所述算法模型对应的第二类事件,所述对所述第一触发事件的风险进行评估,以确定所述第一触发事件的风险是否可接受,包括:对与所述系统组件模型对应的所述第一类事件进行评估,得到第一评估结果;对与所述算法模型对应的所述第二类事件进行评估,得到第二评估结果;在所述第一评估结果和所述第二评估结果均可接受的情况下,确定所述第一触发事件的风险可接受;在所述第一评估结果和所述第二评估结果中的至少一者不可接受的情况下,确定所述第一触发事件的风险不可接受。
6、在一些实施方式中,所述在所述触发事件的风险可接受的情况下,对所述预期功能安全模型进行验证,包括:对所述预期功能安全模型的每个预期功能进行功能验证;在每个预期功能的功能验证通过的情况下,对所述预期功能安全模型进行风险验证;在所述预期功能安全模型的风险验证通过的情况下,对所述预期功能安全模型进行预期功能安全验证。
7、在一些实施方式中,所述方法还包括:在所述危险事件的可控的情况下,对所述预期功能安全模型进行验证;在所述预期功能安全模型的验证通过的情况下,确定智能驾驶系统架构搭建完成。
8、在一些实施方式中,所述方法还包括:在所述触发事件的风险不可接受的情况下,更新所述预期功能安全模型并重复执行对所述预期功能安全模型的每个预期功能对应的危险事件进行评估,以确定所述危险事件的风险可接受度的步骤,直至所述触发事件的风险可接受。
9、在一些实施方式中,所述方法还包括:在所述预期功能安全模型的验证不通过的情况下,更新所述预期功能安全模型并重复执行对所述预期功能安全模型的每个预期功能对应的危险事件进行评估,以确定所述危险事件的风险可接受度的步骤,直至所述预期功能安全模型的验证通过。
10、根据本技术的第二方面,提供一种基于预期功能安全的智能驾驶系统架构的搭建系统,包括:模型建立模块,用于根据车辆预期功能安全的规则和案例数据集,建立智能驾驶系统的预期功能安全模型;危险事件评估模块,用于对所述预期功能安全模型的每个预期功能对应的危险事件进行评估,以确定所述危险事件的风险可接受度;触发事件的风险评估模块,用于在所述危险事件风险不可接受的情况下,对每个预期功能对应的触发事件的风险进行评估,以确定所述触发事件的风险是否可接受;验证模块,用于在所述触发事件的风险可接受的情况下,对所述预期功能安全模型进行验证;以及确定模块,用于在所述预期功能安全模型的验证通过的情况下,确定智能驾驶系统架构搭建完成。
11、根据本技术的第三方面,提供一种电子设备,其包括:一个或多个处理器,存储器以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行上述的基于预期功能安全的智能驾驶系统架构的搭建方法。
12、根据本技术的第四方面,提供一种计算机可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现上述的基于预期功能安全的智能驾驶系统架构的搭建方法的步骤。
13、综上所述,本技术提供的基于预期功能安全的智能驾驶系统架构的搭建方法及系统至少具有以下有益效果:
14、本技术实施例的基于预期功能安全的智能驾驶系统架构的搭建方法,先根据车辆预期功能安全的规则和案例数据集,建立初始的预期功能安全模型;再对初始的预期功能安全模型中每个预期功能对应的危险事件进行评估、对触发事件的风险进行评估以及基于触发事件的风险对所述预期功能安全模型进行验证,最后基于验证结果确认智能驾驶系统架构是否搭建完成。本发明实施例的基于预期功能安全的智能驾驶系统架构的搭建方法,在搭建的过程中,详细的定义了预期功能安全的功能规范和系统规范,并且识别和评估了预期功能安全模型对应的危险事件的风险可接受度以及触发事件的风险的可接受性,进而在危险事件的可控和触发事件的风险的可接受的情况下再进行验证,由此保证了通过本技术方法搭建成的智能驾驶系统架构的安全性和可靠性,减少了智能驾驶系统架构由于非故障情况下系统功能不满足预期而导致的安全风险。并且,本技术的搭建方法是一套完整的系统搭建流程,其能够在搭建的过程中进行预期功能安全的危害因素分析和处理,有效实现了基于预期功能安全的智能驾驶系统架构搭建和实施。
- 还没有人留言评论。精彩留言会获得点赞!