一种基于POD的航空齿轮泵进出口速度场降维重构方法
本发明涉及航空燃油齿轮泵cfd计算,特别涉及一种基于pod的航空齿轮泵进出口速度场降维重构方法。
背景技术:
1、航空发动机燃油齿轮泵所服役的环境高度复杂,其介质温度由-40℃最高可到130℃,环境温度最高可达200℃以上,且常伴随振动、湿度、电磁干扰等多因素影响,因此航空燃油齿轮泵的设计通常是一项需要反复迭代改进的过程,相较于一般的齿轮泵设计周期更长。随着计算机性能的不断提高,计算流体力学(computational fluid dynamics,cfd)逐渐在工程实践中占据了重要地位,被广泛应用于航空各个领域,对加快燃油齿轮泵的精细化设计与优化起着关键作用。
2、尽管cfd技术具有诸多优势,但是燃油齿轮泵作为旋转机械,其内部流场流动情况复杂多变,对计算机的性能有着较高的要求。特别是考虑流固热以及环境因素的燃油泵精细化设计时,计算时长会随着设计变量的增加以及多因素耦合呈几何级数增加,导致研制周期变长,延缓研发进度。例如derakhshan、iuliano,e等人的研究中就展现了cfd的计算时长则会随着设计因素耦合呈几何级数增加这一问题。
3、因此,能够在工程允许的仿真精度范围内追求更新设计范式以缩短仿真时间,是业界急需解决的问题。
技术实现思路
1、为了克服以上技术问题,本发明的目的在于提供一种基于pod的航空齿轮泵进出口速度场降维重构方法,将本征正交分解方法与齿轮泵三维流场仿真相结合,在保证仿真精度的前提下获得更短时间间隔下的航空燃油齿轮泵的参数分布,具有可操作性强,计算时间短、仿真精度高、实施成本低的特点。
2、为了实现上述目的,本发明采用的技术方案是:
3、一种基于pod的航空齿轮泵进出口速度场降维重构方法,包括以下步骤;
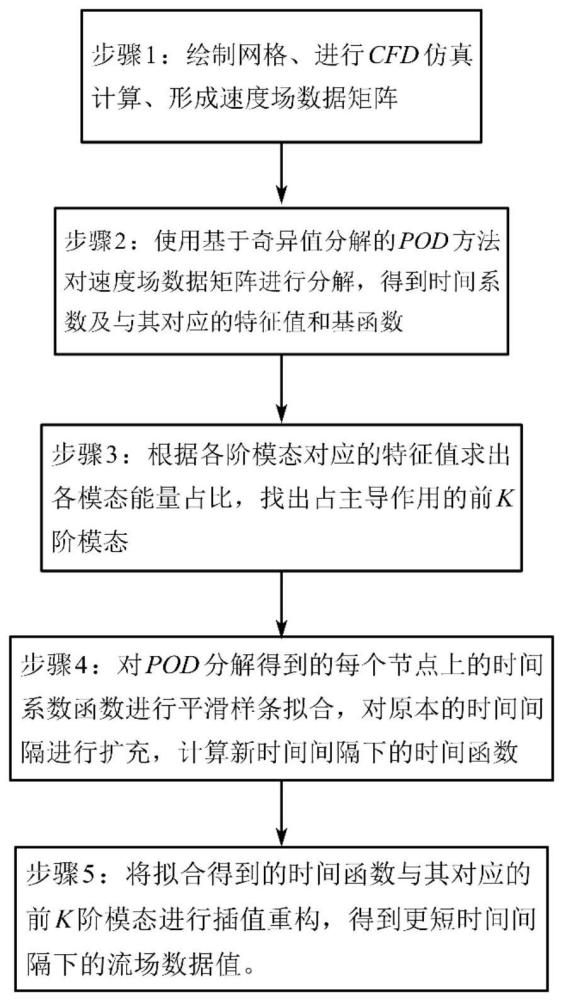
4、步骤一:绘制网格,进行cfd仿真计算,形成速度场数据矩阵;
5、步骤二、使用基于奇异值分解的pod方法对速度场数据矩阵进行分解,得到时间函数及与其对应的特征值和基函数;
6、步骤三、根据各阶模态对应的特征值求出各模态能量占比,找出占主导作用的前k阶模态;
7、步骤四、根据仿真得到的初始流场数据,以及pod模态分析法,对步骤二中pod分解得到的每个节点上的时间函数进行平滑样条拟合,对原本的时间间隔进行扩充,计算新时间间隔下的时间函数;
8、步骤五、将拟合得到的更短时间间隔下的流场数据值及时间函数与其对应的前k阶模态进行插值重构,得到更短时间间隔下的流场数据值。
9、所述步骤一具体为:将所用燃油齿轮泵流体域进行建模,模型由进口、齿轮、出口以及卸荷槽四部分组成;其中齿轮部分绘制六面体结构网格,进出口区域以及卸荷槽部分绘制六面体笛卡尔混合网格;之后将所绘网格导入cfd软件中进行仿真,程序输出的三维流场数据记为v(x,y,z,t)。
10、进一步的,存储方案一为输出所有仿真步长的结果;
11、方案二为每次间隔20个仿真步输出结果,并将方案二用做之后pod插值重构的原数据。
12、所述步骤二具体为:将cfd所得的三维流场数据记为v(x,y,z,t),其表示为均值与脉动值之和:
13、
14、:平均速度;v′(x,y,z,t):脉动速度;x,y,z:流场空间位置坐标;t:时间;
15、其中,脉动值v′(x,y,z,t)在第j个离散时间下记为v′(x,y,z,tj),j∈[1,nt],假设其被投影到一组正交基形成的空间上,
16、即:
17、tj:第j个离散时间;v′(x,y,z,tj):脉动速度在tj下的值;ai(tj):tj时刻的第i个时间函数;:第i个正交基;
18、为确保pod分解精度,正交基应满足如下条件:
19、
20、φ:一组正交基;v′(x,y,z,tj):脉动速度在tj下的值;ai(tj):tj时刻的第i个时间函数;:第i个正交基;
21、经过数学推导,其等价于如下形式:
22、φ=argmax||(v′(x,y,z,tj),φ)||,(φ,φ)=1
23、φ:一组正交基;v′(x,y,z,tj):脉动速度在tj下的值;(·,·):内积运算;
24、上式可采用拉格朗日乘子法求解,φ为向量集合v′所形成空间的一组规范正交基,在空间v′中的任一基底,也可通过该空间中的基本向量线性叠加表示,该正交基可以表示为:
25、
26、δl:一组规范正交基;:正交基l对应的第j个系数;v′j:向量集合v′第j个向量;
27、求解上式中的系数即可得出规范正交基,其中,第i个基底的第j个元素,即为由v构成的相关矩阵a=vtv的第i个特征值所对应特征向量的第j个元素,结合矩阵的相关运算可写为:
28、am入m
29、a:相关矩阵;m:相关矩阵a的特征向量;λ:相关矩阵a的特征值;
30、上式中,m为相关矩阵a的特征向量,即该时刻下pod模态对应的时间函数。
31、所述步骤三具体为:采用以上pod方法分别对进出口平面上的速度进行分解,前k个pod模态所包含的流场结构特征可以采用其占据的能量表示,定义为:
32、
33、k:pod分解后的第k阶模态e:前k个模态占据的能量占据总能量的比例;λ:相关矩阵a的特征值;
34、用上式求得前k阶模态所占据的能量总和,考量进出口平面上pod分解后各阶模态的能量占比,前k阶模态已经包含了所选平面的大部分流动信息,因此选取前k阶pod模态对进出口区域的速度场进行重构,即可获得准确的结果。
35、所述步骤四具体为:将前序步骤的时间函数ai(tj),i∈[1,k],j∈[1,nt]进行平滑样条拟合。由于平滑样条拟合已有大量成熟的理论和计算程序,此处不多赘述。为扩充时间间隔,将所需的新时间间隔tj(j∈[1,n′t])带入所得的拟合函数,解出新的时间函数ai(tj),i∈[1,k],j∈[1,n′t]。
36、所述步骤五具体为:将上述步骤所得的ai(tj),i∈[1,k],j∈[1,n′t]和带入如下公式:
37、
38、u(x,y,z,t):重构后的流场速度矩阵;:平均速度;ai(t):第i个时间函数;:第i个正交基;
39、计算所得的矩阵u即为具有更短时间间的流场速度矩阵。
40、本发明的有益效果。
41、本发明将pod方法与cfd齿轮泵精细化仿真过程相结合,可以在保证同等计算精度的前提下显著缩短仿真所需时间,减少工程实践中的时间成本和算力需求,在保证准确度的前提下提高仿真效率。另一方面,基于时间函数与pod正交基,结合平滑样条插值法实现了齿轮泵进出口区域速度场重构,基于cfd得出的部分时刻数据,可对仿真间隔内任意新时刻下的速度场分布进行预测。相较传统纯cfd方法,本方法的预测结果不仅能够保证原时间节点的速度准确性,且能在更短的时间间隔下,得到进出口区域速度场的更精细化重构与连续预测值,解决了目前cfd方法计算量大、计算时间长的问题,实现了同等精度要求下更短时间间隔下的齿轮泵进出口速度场的预测,更好的满足了工程问题中对减少计算时间、提高计算效率的需求。
- 还没有人留言评论。精彩留言会获得点赞!