一种面向空间目标探测的杂散光滤除系统及其方法与流程
本发明涉及图像处理领域,具体涉及一种面向空间目标探测的杂散光滤除系统及其方法,旨在提高空间目标探测相机的抗杂散光能力,使其在受杂散光干扰的情况下依然能可靠、稳定的探测出真实目标。
背景技术:
1、空间目标探测相机在卫星平台光电敏感器和光学有效载荷中应用广泛,目标探测的可靠性与精度是决定产品性能的关键部分。而杂散光是影响其在轨运行可靠性与精度的主要因素。当探测器受到月光、地气光或太阳光的干扰后,视场内出现杂散光,其成像结果往往会存在背景灰度较亮甚至饱和、背景灰度不均匀、噪声被放大的情况。这严重影响了目标探测的可靠性,最终导致星敏感器全天识别失败、大视场空间目标搜索相机误剔除有效目标等问题。通常,改进遮光罩结构可以提升抑制杂散光干扰的能力,但受限于尺寸、重量、加工工艺及消光涂层发黑工艺,在临界角度条件下,图像中存在一定程度的光污染是无法避免的。此外,月球、地球、星体反射、镜头鬼像等杂散光也可能对光学敏感器的成像及目标探测造成影响。
2、实时的杂散光滤除方法能够有效降低空间目标探测器在轨执行任务时视场中杂散光的干扰,而采用现场可编程门阵列(field programmable gate array,fpga)设计数字逻辑电路来实现杂散光滤除算法,具有运算速度快、可靠性高、设计灵活等特点。然而目前的抗杂散光方法普遍存在杂散光滤除效果不佳、易剔除弱小目标和面目标、计算量大、实时性差等缺陷。因此,研究杂散光滤除性能好、利于硬件实现、实时性好的杂散光滤除算法对于空间目标光学探测技术具有非常重要的意义。
技术实现思路
1、本发明的目的在于提供一种面向空间目标探测的杂散光滤除系统及其方法,该系统根据图像块的灰度均值、块内灰度梯度、块内最大类间灰度差三种特征量综合判断杂散光干扰程度,并过滤出包含真实目标的图像数据。该系统能够准确识别出受严重杂散光干扰易产生虚警的区域,过滤后的图像数据虚假目标少。
2、为了达到上述目的,本发明通过以下技术方案实现:
3、一种面向空间目标探测的杂散光滤除系统,包含:
4、图像块数据存储模块,其用于随图像数据流将像素灰度值按其所属图像块区域保存至图像数据存储器中;
5、图像块特征计算模块,其用于按图像块区域读取图像数据存储器中的灰度数据,基于此灰度数据计算出图像块的灰度均值gmean、块内灰度梯度和块内最大类间灰度差dmax三种特征量,并综合此三种特征量判定图像块受杂散光污染的程度,得到图像块的有效标志,进而基于有效标志得到有效图像块;
6、真实目标过滤模块,其用于将有效图像块的灰度数据基于图像块灰度均值gmean和阈值偏移量tofst过滤出包含真实目标的灰度信息。
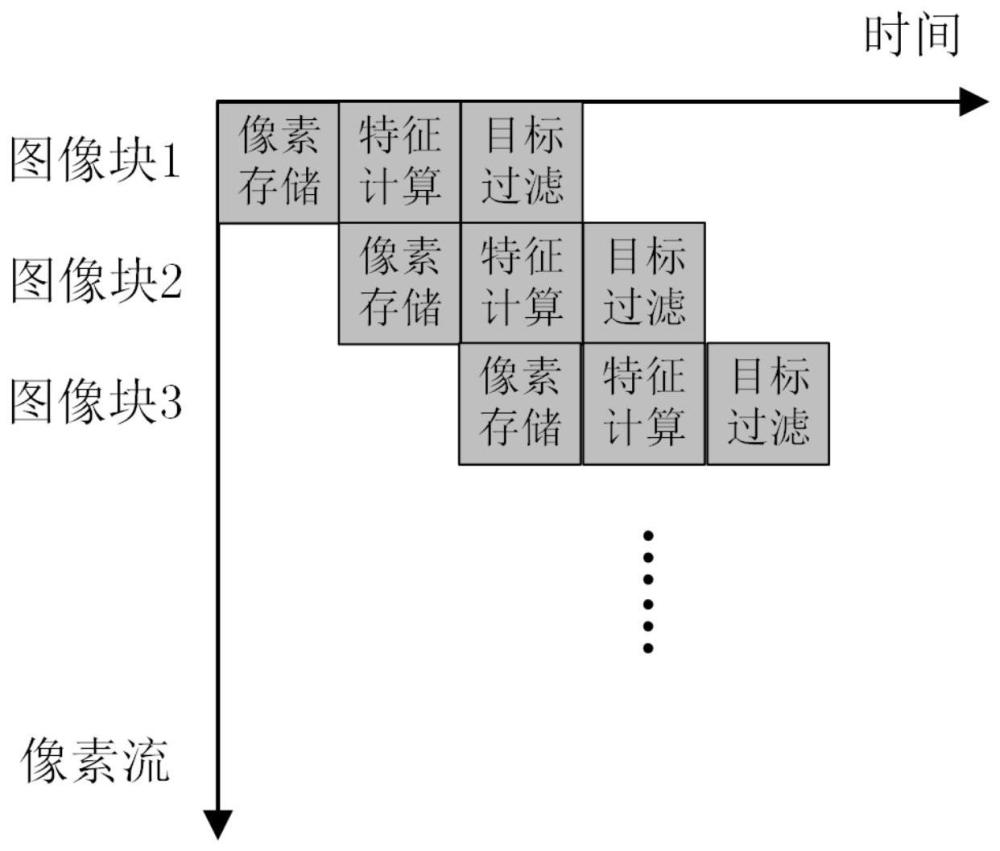
7、可选的,各个功能模块选用fpga设计数字逻辑电路实现基于并行计算结构的杂散光滤除功能。
8、可选的,所述灰度均值gmean的计算包含:
9、将图像按照k*k的大小划分,所述灰度均值gmean的计算公式为:
10、
11、其中,g(x,y)为坐标(x,y)像素的灰度值,s为图像块像素集合,gmean为图像块的灰度均值,k为一个图像块的边长。
12、可选的,所述块内灰度梯度的计算包含:
13、将图像块分为四个子块,每个子块的灰度均值ai为:
14、
15、其中,i为子块序号,si为图像块内子块的像素集合,ai为子块的灰度均值,通过公式(2)可得到四个子块的灰度均值分别为a1、a2、a3、a4;
16、图像块内水平方向、竖直方向和两个对角线方向的灰度均值梯度值△a1、△a2、△a3、△a4分别为:
17、
18、
19、δa3=|a1-a4| (5)
20、δa4=|a2-a3| (6)。
21、可选的,所述块内最大类间灰度差dmax的计算包含:
22、
23、其中,c1和c2为目标和背景的像素集合,n1和n2为目标和背景的像素数,d为目标和背景的灰度均值差;其中图像块内按分类阈值tc区分目标和背景,若灰度值大于分类阈值tc,则此像素属于目标,否则属于背景,所述分类阈值tc为图像块所包含的其中一个像素灰度值;
24、然后依次将图像块所包含的各个像素灰度值作为分类阈值tc,得到各分类阈值tc下的类间灰度差,取最大值作为此图像块的块内最大类间灰度差dmax:
25、dmax=max[d1,d2,...,du] (8)
26、其中,u为图像块所包含的灰度值个数。
27、可选的,所述图像块的有效标志fvld通过下列方式获得:
28、综合图像块的灰度均值gmean、块内灰度梯度和块内最大类间灰度差dmax,通过以下判断公式,得到此图像块的有效标志fvld,
29、
30、其中,fvld为图像块有效标志,1表示有效,0表示无效;c1、c2和c3分别为三个判断条件:
31、
32、
33、
34、其中,t1和th分别为杂散光干扰程度判断阈值且t1<th;若灰度均值gmean小于tl,则图像块受杂散光干扰程度较轻;若灰度均值gmean大于或等于tl并且小于th,则图像块受杂散光干扰程度较重;若灰度均值gmean大于或等于th,则图像块受杂散光干扰程度严重;u1和u2分别为块内梯度判断阈值;dc为块内最大类间灰度差dmax的判断阈值。
35、可选的,基于图像块的有效标志fvld,按照公式(13)过滤图像数据并输出
36、
37、其中,go(x,y)为杂散光滤除处理后输出的像素灰度值,tofst为阈值偏移量。
38、可选的,一种面向空间目标探测的杂散光滤除系统的方法,包含:
39、图像块数据存储模块随图像数据流将像素灰度值按其所属图像块区域保存至图像数据存储器中;
40、图像块特征计算模块按照图像块区域读取图像数据存储器中的灰度数据,基于此灰度数据计算出图像块的灰度均值gmean、块内灰度梯度和块内最大类间灰度差dmax三种特征量,并综合此三种特征量判定图像块受杂散光污染的程度,得到图像块的有效标志,进而基于有效标志得到有效图像块;
41、真实目标过滤模块将有效图像块的灰度数据基于图像块灰度均值gmean和阈值偏移量tofst过滤出包含真实目标的灰度信息。
42、可选的,还包含:
43、将完成杂光滤除处理后的灰度信息按图像数据流输出至后续图像处理功能模块。
44、可选的,所述后续图像处理功能模块为目标质心提取模块。
45、本发明与现有技术相比具有以下优点:
46、本发明的一种面向空间目标探测的杂散光滤除系统及其方法中,该系统基于杂散光干扰的特性,设计了图像块灰度均值、块内灰度梯度、块内最大类间灰度差三种特征量,综合判定图像块受杂散光污染的严重程度,能够准确识别出受严重杂散光干扰易产生虚警的区域,过滤后的图像数据虚假目标少。
47、进一步的,该系统根据杂散光污染的严重程度采取相应的处理措施,能够有效避免杂散光干扰程度较轻区域内的真实目标被误剔除,真实目标探测率高。
48、进一步的,该系统的算法处理流程适用于并行计算结构,对存储空间要求低,适用于空间目标探测相机随探测器输出的图像数据流实时处理,时效性好。
- 还没有人留言评论。精彩留言会获得点赞!