一种基于滑移面网格的旋转周期结构电磁场仿真方法与流程
本发明涉及计算机辅助工程领域,尤其涉及电磁场仿真,尤其涉及一种基于滑移面网格的旋转周期结构电磁场仿真方法。
背景技术:
1、三维旋转周期结构在电磁场仿真中大量存在,常见的如旋转电机、电磁阀等。为了分析这类旋转周期结构的电磁性能,一般需要借助数值方法进行仿真分析,目前有限元法是电磁场仿真中的最常用数值方法之一。由于三维旋转周期结构既有周期对称的特点,又包含了旋转运动,因此给有限元法的应用带来一定的困难和挑战。因此在对三维旋转周期结构进行仿真分析时常用的方法主要有3种:棱边插值法、拉格朗日乘子法以及网格重划分法。
2、方法1是棱边插值法,棱边插值法可分为非规整面网格棱边插值法和规整矩形面网格棱边插值法;非规整面网格棱边插值法,对滑移面划分非规整面网格,通过网格映射、棱边分割、分段积分等运算,将滑移从面的棱边自由度缩减表示为滑移主面的棱边自由度的线性组合,从而实现滑移面的连续性条件,参见文献:专利《一种电磁场非匹配棱边元的插值方法》;与非规整面网格棱边插值法不同,规整矩形面网格棱边插值法对滑移面划分规整的矩形面网格,并利用规整矩形面网格之间的简单映射关系,从而简化了滑移从面的棱边自由度缩减过程,参见文献:golovanov c,coulomb j,maréchal y,meunier g.3d meshconnection techniques applied to movement simulation[j].ieee transactions onmagnetics,1998,34(5):3359-3362.。
3、方法2是拉格朗日乘子法,该方法通过引入拉格朗日乘子,建立非规整面网格的耦合矩阵,实现滑移面的连续性条件,参见文献:rodger d,lai h c,leonard p j.coupledelements for problems involving movement(switched reluctance motor)[j].ieeetransactions on magnetics,1990,26(2):548-550.和专利《基于棱边单元法处理电磁场中移动边界问题的耦合方法》。
4、方法3是网格重划分法,不同于方法1和方法2创建滑移面并施加连续性条件,该方法在旋转转子网格和静止定子网格之间建立带状气隙网格区域,当转子网格发生旋转,为避免带状气隙区域网格畸变,对带状气隙网格区域进行网格重划分,参见文献:davat b,ren z,lajoie-mazenc m.the movement in field modeling[j].ieee transactions onmagnetics,1985,21(6):2296-2298.;
5、但是上述方法应用在三维旋转周期结构的电磁场仿真中均存在不同程度的问题:
6、第1种方法中的非规整面网格棱边插值法,虽然可以处理任意划分的面网格,但是该方法的网格映射、棱边分割、分段积分等运算过程较复杂,尤其对于三维旋转周期结构,还需要在算法中考虑滑移曲面上的棱边投影和棱边交叉判断等问题,加大了程序实现和计算量的负担,降低了程序的鲁棒性;而规整矩形面网格棱边插值法,虽然相比非规整面网格棱边插值法简化了滑移从面的棱边自由度缩减过程,但是矩形面网格限制了复杂电磁模型四面体网格的全自动划分,导致人工干预成分增加,此外该方法未对三维旋转周期结构的滑移面和周期面的处理同时加以考虑。
7、第2种方法需要网格映射、网格求交等复杂运算,还额外引入拉格朗日乘子并计算耦合矩阵,增大了计算规模,降低了计算效率;此外该方法还会产生病态的鞍点系统,导致计算不收敛而失败的问题,通过进一步引入改进措施如特殊预处理、正则化可以一定程度改善收敛性,可是改进措施一般不具备通用性,同时加大了程序实现的负担。
8、第3种方法对于非规整气隙网格划分,难以控制转子和定子未对齐部分的气隙网格使其满足连续性条件,因此尚不能有效处理三维旋转周期结构,同时该方法需要对带状气隙进行网格重划分和数据插值,导致计算效率降低;对于规整六面体气隙网格划分,则需要对定子侧和转子侧与气隙交界处的面网格均为规整矩形面网格,限制了复杂电磁模型四面体网格的全自动划分,导致人工干预成分增加,同时该方法也需要对带状气隙进行网格重划分和数据插值,导致计算效率降低。
技术实现思路
1、本发明提供一种基于滑移面网格的旋转周期结构电磁场仿真方法,以克服采用现有技术对三维旋转周期结构进行电磁场仿真时存在的计算规模大的技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种基于滑移面网格的旋转周期结构电磁场仿真方法,具体步骤包括:
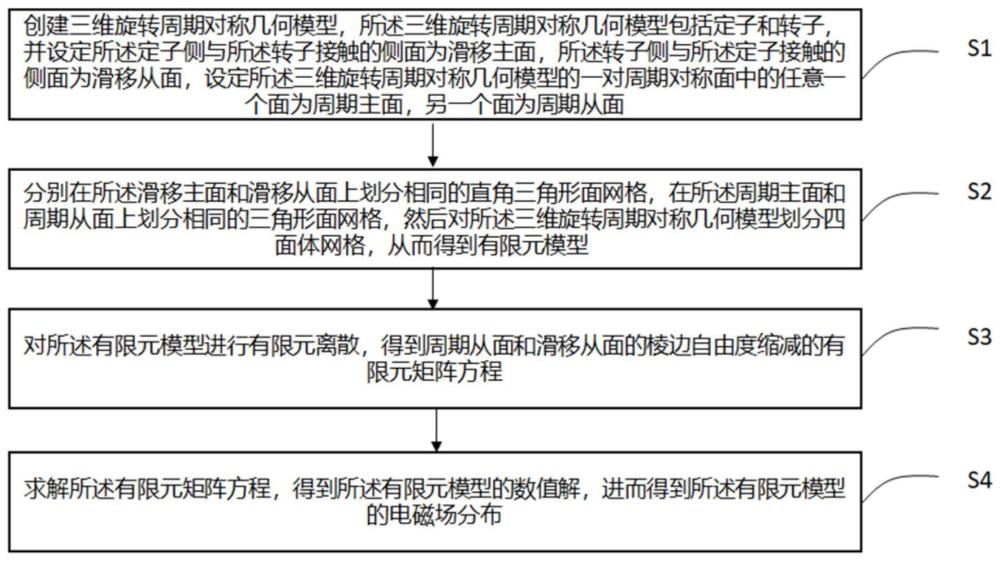
4、s1:基于三维旋转周期结构全几何模型的1/n创建三维旋转周期对称几何模型,n为大于1的整数,所述三维旋转周期对称几何模型包括定子和转子,并设定所述定子侧与所述转子接触的侧面为滑移主面,所述转子侧与所述定子接触的侧面为滑移从面,设定所述三维旋转周期对称几何模型的一对周期对称面中的任意一个面为周期主面,另一个面为周期从面;
5、s2:分别在所述滑移主面和滑移从面上划分相同的直角三角形面网格,在所述周期主面和周期从面上划分相同的三角形面网格,然后对所述三维旋转周期对称几何模型划分四面体网格,从而得到有限元模型;
6、s3:对所述有限元模型进行有限元离散,得到周期从面和滑移从面的棱边自由度缩减的有限元矩阵方程;
7、s4:求解所述有限元矩阵方程,得到所述有限元模型的数值解,进而得到所述有限元模型的电磁场分布。
8、具体地,s2中,分别在所述滑移主面和滑移从面上划分相同的直角三角形面网格,在所述周期主面和周期从面上划分相同的三角形面网格,然后对所述三维旋转周期对称几何模型划分四面体网格,从而得到有限元模型的过程包括:
9、s21:对所述滑移主面的两组对边分别进行等间距划分,然后对滑移主面划分矩形面网格并添加对角线,得到直角三角形面网格;将滑移主面的直角三角形面网格复制到所述滑移从面上或对滑移从面执行与滑移主面同样的网格划分步骤,使所述滑移从面有与所述滑移主面网格相同的直角三角形面网格;
10、s22:对所述周期主面划分三角形面网格,再将所述周期主面的三角形面网格复制到所述周期从面上或对周期从面执行与周期从面同样的网格划分步骤,使所述周期从面有与所述周期主面相同的三角形面网格;
11、s23:对所述三维旋转周期对称几何模型划分四面体网格,且所述四面体网格受到滑移主面、滑移从面、周期主面和周期从面上的面网格的约束。
12、具体地,s3中,对所述有限元模型进行有限元离散,得到周期从面和滑移从面的棱边自由度缩减的有限元矩阵方程的过程包括:
13、s31:对所述有限元模型基于变分原理或伽辽金法进行有限元离散;对磁场使用磁矢势表示,并对磁矢势使用棱边元基函数离散,对电场使用电压表示,对电压使用节点元基函数离散;
14、s32:根据所述周期从面和周期主面之间三角形面网格的一一对应关系,将所述周期从面的棱边自由度缩减,即将所述周期从面上的棱边的自由度表示为所述周期主面上的棱边的自由度,实现所述有限元模型中所述周期主面和周期从面的连续性条件;
15、s33:根据所述滑移从面和滑移主面之间直角三角形面网格的映射关系,将所述滑移从面的棱边自由度缩减,即将滑移从面上的棱边的自由度表示为滑移主面上的两条相邻棱边的自由度的线性组合,实现所述有限元模型中滑移主面和滑移从面的连续性条件;
16、s34:得到周期从面的棱边自由度和滑移从面的棱边自由度缩减的有限元矩阵方程,表示为:
17、
18、其中,krr表示棱边自由度ar与自身的磁阻矩阵;表示周期从面的棱边自由度aps和滑移从面的棱边自由度ass缩减后的磁阻矩阵;apm表示周期主面的棱边自由度;asm表示滑移主面的棱边自由度;vc表示定子和转子内导体区域的电压节点自由度;∫vc表示vc对时间的积分;ar表示模型中除去apm和asm的未知棱边自由度;crr、krc、kcc分别表示导电区域的电导矩阵;分别表示ar、apm、asm对时间的一阶导数;j表示电流密度离散矢量;i表示节点电流矢量。
19、具体地,s33中,根据所述滑移从面和滑移主面之间直角三角形面网格的映射关系,将滑移从面的棱边自由度缩减的步骤包括:
20、s331:对所述三维旋转周期对称几何模型的滑移主面上的面网格和自由度采用连续旋转和复制的方式进行延拓,从而将滑移主面上的面网格和自由度延拓至滑移主面所在的整个圆周面上;
21、s332:根据所述转子的旋转角度,更新所述滑移从面上的棱边的位置,更新后,确定所述滑移从面上的每条棱边对应处于所述滑移主面上的哪两条相邻棱边之间,然后,计算所述滑移从面上的每条棱边与所确定的所述滑移主面上的两条相邻棱边的权重,从而将所述滑移从面的每条棱边的自由度表示为所确定的所述滑移主面上的两条相邻棱边的自由度的线性组合,实现所述滑移从面的棱边自由度的缩减。
22、具体地,s332中,具体过程为;
23、首先,根据转子的旋转角度tr,确定其满足条件tk≤tr<tk+1时的整数k,其中,tk=kt1,tk+1=(k+1)t1,t1=360°/mn,m为滑移主面和滑移从面在周向上被均分的份数;
24、若转子的旋转角度分别为tk和tk+1,此时,滑移从面棱边s与滑移主面的棱边发生重合,所重合的滑移主面棱边分别为mk和mk+1,因此,转子的旋转角度为tr时,滑移从面棱边s与mk和mk+1相比偏转角度大小分别为|tr-tφk|和|tk+1-tr|;
25、最后将滑移从面棱边s的棱边自由度ass表示为mk和mk+1的自由度和的线性组合,表示为:
26、
27、其中,当转子的旋转角度为tk时,若mk方向与滑移从面棱边s的自由度方向一致,则sign(mk)为1,若方向相反,则sign(mk)为-1;当转子的旋转角度为tk+1时,若mk+1方向与滑移从面棱边s的自由度方向一致,则sign(mk+1)为1,若方向相反,则sign(mk+1)为-1。
28、具体地,s4中,求解所述有限元矩阵方程,得到所述有限元模型的数值解,进而得到所述有限元模型的电磁场分布的过程为:
29、1)使用直接法或迭代法求解所述有限元矩阵方程,得到棱边的磁矢势自由度解;
30、2)根据磁感应强度等于磁矢势旋度的关系,计算所述有限元模型的四面体网格中心以及节点处的磁感应强度分布;根据电场强度等于电压负梯度的关系,计算所述有限元模型的四面体网格中心以及节点处的电场强度分布;
31、3)根据所述磁感应强度分布、电场强度分布及电磁材料属性,计算所述有限元模型的四面体网格中心以及节点处的磁场强度分布以及电通量密度分布。
32、有益效果:本发明基于三维旋转周期结构全几何模型的1/n创建了三维旋转周期对称几何模型,即可进行电磁场仿真,无需创建全模型,因而减小了计算规模;并通过周期从面和周期主面之间三角形面网格的一一对应关系以及滑移从面和滑移主面之间直角三角形面网格的映射关系,获得了自由度缩减的有限元矩阵方程,大大减少旋转电机、电磁阀等电磁装置的仿真规模,且支持四面体网格全自动划分,适用于工程中复杂几何形状的电磁装置,同时该方法实现起来简单且用户干预少;可以提高旋转电机、电磁阀等产品的研发设计的效率,缩短产品研发周期。
- 还没有人留言评论。精彩留言会获得点赞!