一种针痕检测机台判定方法、系统、存储介质及计算机与流程
本发明涉及针痕检测机台判定,具体涉及一种针痕检测机台判定方法、系统、存储介质及计算机。
背景技术:
1、晶圆测试是半导体生产过程中至关重要的一个环节,晶圆测试可以将晶圆中存在功能缺陷的芯片提前挑选出来,避免这些存在功能缺陷的芯片进入到后期芯片封装程序中。
2、晶圆检测过程中,主要用到探针卡,通过探针卡上的多个探针与晶圆上的芯片电连接进行电性测试,芯片上设有与探针对应的焊点,探针与焊点接触后,施加一定的压力,就会在焊点上留下针痕,通过检测针痕可以判定探针与焊点的接触是否合格。
3、目前,针痕的合格与否主要通过人工来进行判定,芯片的人为判定主观性较强,判断标准不唯一,容易出现误判。虽然目前市面上也出现了一些针痕判定机台,在一定程度上提高了针痕判定的客观性,但目前机台对针痕合格与否的判定标准主要为简单的图像对比,形式比较单一,缺乏反馈,机台调整缺乏参考,影响了检测机台的进一步使用。
技术实现思路
1、基于此,本发明的目的是提供一种针痕检测机台判定方法、系统、存储介质及计算机,以解决现有技术中存在的技术问题。
2、本发明提出一种针痕检测机台判定方法,包括;
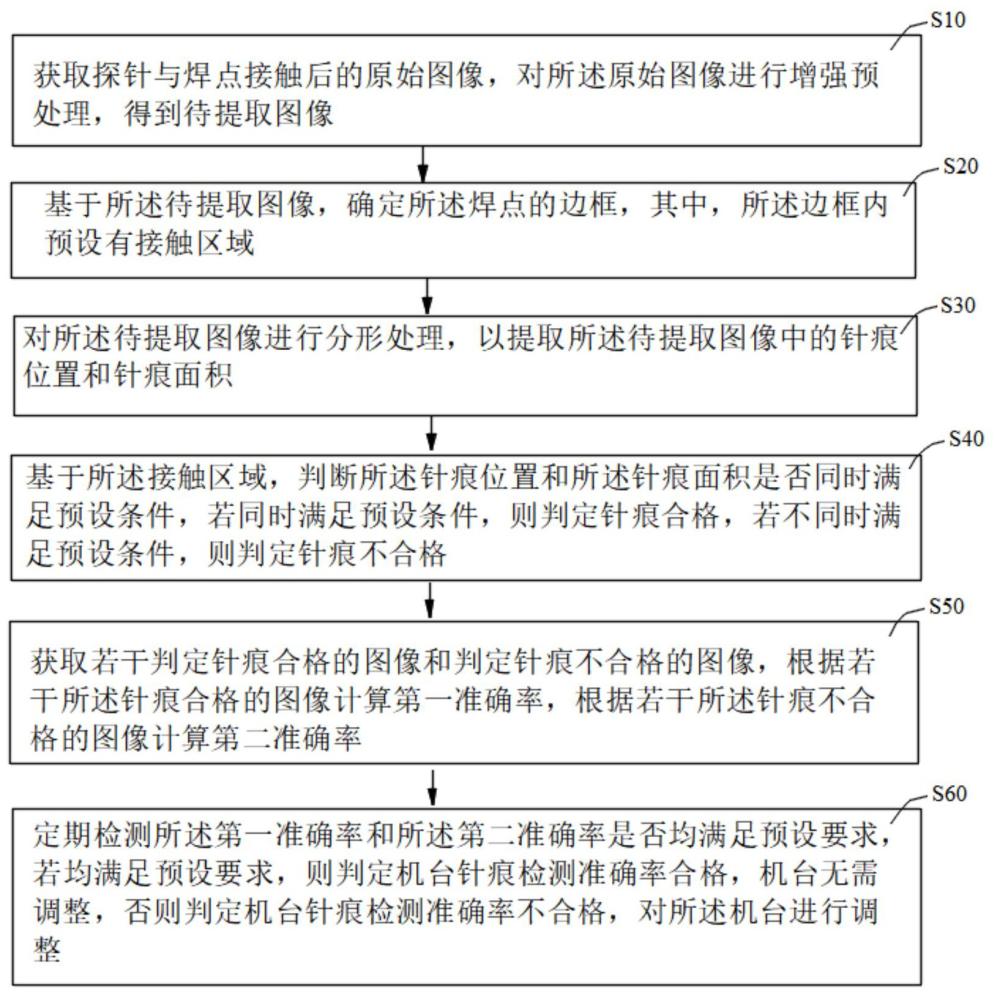
3、获取探针与焊点接触后的原始图像,对所述原始图像进行增强预处理,得到待提取图像;
4、基于所述待提取图像,确定所述焊点的边框,其中,所述边框内预设有接触区域;
5、对所述待提取图像进行分形处理,以提取所述待提取图像中的针痕位置和针痕面积;
6、基于所述接触区域,判断所述针痕位置和所述针痕面积是否同时满足预设条件,若同时满足预设条件,则判定针痕合格,若不同时满足预设条件,则判定针痕不合格;
7、获取若干判定针痕合格的图像和判定针痕不合格的图像,根据若干所述针痕合格的图像计算第一准确率,根据若干所述针痕不合格的图像计算第二准确率;
8、定期检测所述第一准确率和所述第二准确率是否均满足预设要求,若均满足预设要求,则判定机台针痕检测准确率合格,机台无需调整,否则判定机台针痕检测准确率不合格,对所述机台进行调整;
9、所述对所述待提取图像进行分形处理,以提取所述待提取图像中的针痕位置和针痕面积的步骤包括:
10、根据差分盒维数算法获取所述待提取图像中各像素点的盒维数;
11、根据各像素点对应的所述盒维数得到所述待提取图像的盒维数矩阵;
12、提取所述盒维数矩阵中的奇异值,根据所述奇异值寻找所述待提取图像中背景图像、针痕图像的线性分形维数关系,从而获得所述背景图像和所述针痕图像的特征维值;
13、将所述背景图像和所述针痕图像的特征维值与预设维值进行比较,以在所述待提取图像中分离出针痕形状和针痕位置;
14、根据所述针痕形状计算所述针痕面积。
15、优选地,所述对所述原始图像进行增强预处理的步骤包括:
16、对所述原始图像的像素进行归一化处理,并绘制所述原始图像的灰度直方图;
17、根据所述原始图像的灰度直方图,计算所述原始图像中像素点的第一灰度范围和所述原始图像中针痕轮廓像素点的第二灰度范围;
18、对针痕轮廓的像素灰度进行分段组合拉伸变换,得到变换图像,并计算所述变换图像中像素点的第三灰度范围和所述变换图像中针痕轮廓像素点的第四灰度范围;
19、根据所述第一灰度范围、所述第二灰度范围、所述第三灰度范围、所述第四灰度范围计算所述变换图像中像素点灰度值。
20、优选地,所述变换图像中各像素点灰度值的表达式为:
21、
22、式中,表示变换图像中像素点(i,j)的灰度值,表示原始图像中像素点(i,j)的灰度值,从原始图像中的灰度直方图中直接读取,()表示第一灰度范围,()表示第二灰度范围,()表示第三灰度范围,()表示第四灰度范围,为灰度计算系数,为拉伸变换系数。
23、优选地,所述盒维数的表达式为:
24、
25、式中,为待提取图像中像素点(i,j)的盒维数,为待提取图像的盒子数,,m为分形维尺度,y为待提取图像的矩阵窗口。
26、优选地,所述基于所述接触区域,判断所述针痕位置和所述针痕面积是否同时满足预设条件,若同时满足预设条件,则判定针痕合格,若不同时满足预设条件,则判定针痕不合格的步骤包括:
27、获取所述接触区域的边界范围,判断所述针痕位置是否位于所述接触区域的边界范围内,若位于边界范围内,则判定针痕位置合格;
28、根据所述接触区域的边界范围计算所述接触区域的面积;
29、判断所述针痕面积与所述接触区域的面积之比是否在预设范围内,若面积之比在预设范围内,则判定所述针痕面积合格;
30、若所述针痕位置和所述针痕面积均判定合格,则判定针痕合格,否则判定针痕不合格。
31、优选地,所述第一准确率的表达式为:
32、
33、所述第二准确率的表达式为:
34、
35、式中:yp为机台判定针痕合格的图像且实际也为针痕合格的图像,yn为机台判定针痕合格的图像但实际为针痕不合格的图像,dp为机台判定针痕不合格的图像且实际也为针痕不合格的图像,dn为机台判定针痕不合格的图像但实际为针痕合格的图像。
36、优选地,所述针痕检测机台判定方法还包括:根据所述第一准确率和所述第二准确率计算综合准确率;
37、定期检测所述第一准确率、所述第二准确率以及所述综合准确率是否均满足预设要求,若均满足预设要求,则判定机台针痕检测准确率合格,机台无需调整,否则判定机台针痕检测准确率不合格,对所述机台进行调整;
38、所述综合准确率的表达式为:
39、
40、式中,h为综合准确率,f为第一准确率,g为第二准确率。
41、本发明还提出一种针痕检测机台判定系统,包括;
42、预处理模块,用于获取探针与焊点接触后的原始图像,对所述原始图像进行增强预处理,得到待提取图像;
43、确定模块,用于基于所述待提取图像,确定所述焊点的边框,其中,所述边框内预设有接触区域;
44、分形模块,用于对所述待提取图像进行分形处理,以提取所述待提取图像中的针痕位置和针痕面积;
45、第一判断模块,用于基于所述接触区域,判断所述针痕位置和所述针痕面积是否同时满足预设条件,若同时满足预设条件,则判定针痕合格,若不同时满足预设条件,则判定针痕不合格;
46、计算模块,用于获取若干判定针痕合格的图像和判定针痕不合格的图像,根据若干所述针痕合格的图像计算第一准确率,根据若干所述针痕不合格的图像计算第二准确率;
47、第二判断模块,用于定期检测所述第一准确率和所述第二准确率是否均满足预设要求,若均满足预设要求,则判定机台针痕检测准确率合格,机台无需调整,否则判定机台针痕检测准确率不合格,对所述机台进行调整;
48、所述对所述待提取图像进行分形处理,以提取所述待提取图像中的针痕位置和针痕面积的步骤包括:
49、根据差分盒维数算法获取所述待提取图像中各像素点的盒维数;
50、根据各像素点对应的所述盒维数得到所述待提取图像的盒维数矩阵;
51、提取所述盒维数矩阵中的奇异值,根据所述奇异值寻找所述待提取图像中背景图像、针痕图像的线性分形维数关系,从而获得所述背景图像和所述针痕图像的特征维值;
52、将所述背景图像和所述针痕图像的特征维值与预设维值进行比较,以在所述待提取图像中分离出针痕形状和针痕位置;
53、根据所述针痕形状计算所述针痕面积。
54、本发明还提出一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述针痕检测机台判定方法。
55、本发明还提出一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述针痕检测机台判定方法。
56、本发明相比于现有技术的有益效果为:本发明提供的针痕检测机台判定方法,首先获取探针与焊点接触后的原始图像,对原始图像进行增强预处理,得到待提取图像,有效的增强了图像中针痕的显示,加强图像判读和识别效果;获取焊点的接触区域边界和面积,再通过分形处理,提取待提取图像中的针痕位置和针痕面积,通过分形方法提取图像中的目标,有效的减小了图像中背景复杂、噪声大等产生的干扰,提高了目标区域提取的准确性,基于接触区域,判断针痕位置和针痕面积是否同时满足预设条件,若同时满足预设条件,则针痕合格,若不同时满足预设条件,则针痕不合格;本技术基于图像识别的方式对针痕进行检验,有效的提高了针痕检验的准确性,降低误判率。进一步的,获取机台判断针痕合格图像和不合格图像的准确率,根据准确率提供反馈,根据反馈结果可以及时发现机台检测的准确率是否满足要求,以及时对检测机台进行调整,提高机台的检测效果,适合大范围推广。
57、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!