基于EKF算法的电液制动系统的主缸压力估计方法与流程
本发明涉及电液制动系统,具体为基于ekf算法的电液制动系统的主缸压力估计方法。
背景技术:
1、当前电液制动系统主要分为两类,第一类是以液压泵与高压蓄能器作为液压动力源的泵式电子液压制动系统,第二类是以电机作为动力源,通过机械减速机构推动制动主缸活塞进行减压的集成式电子液压制动系统,在现有技术中,主缸压力的估计方法可以分为两类,一种是基于电液制动系统自身的摩擦特性和位移压力特性,另一种是基于车辆减速度与液压力之间的关系,在申请号为202110761148.7的中国专利公开了“一种基于ehb自身特性的主缸液压力估计方法,包括步骤:1)建立ehb系统的动力学方程,对ehb的滑动摩擦力进行增压工况和减压工况下的测试,获取测试数据;2)根据ehb中传动机构的传动原理,获取滑动摩擦力的理论模型;3)利用测试数据,对滑动摩擦力理论模型的参数进行拟合,获取ehb的滑动摩擦力模型;4)对ehb的动力学方程进行求导,并令齿条速度为零,获取ehb的静摩擦力模型;5)将ehb的静摩擦力与ehb的滑动摩擦力模型合并,建立随电机力矩自适应的库伦摩擦模型;6)利用建立的模型,结合ehb的动力学方程,对主缸液压力进行估计。与现有技术相比,本发明具有鲁棒性好等优点。”
2、该对比文件仅仅解决了通过电液制动系统自身特性来估计主缸压力估计的问题,但ehb自身特性受齿条速度、温度等多种因素的影响较大,容易导致电液制动系统的主缸压力估计出现较大的误差,导致行车安全受到影响。
技术实现思路
1、本发明的目的在于提供基于ekf算法的电液制动系统的主缸压力估计方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:基于ekf算法的电液制动系统的主缸压力估计方法,包括以下步骤:
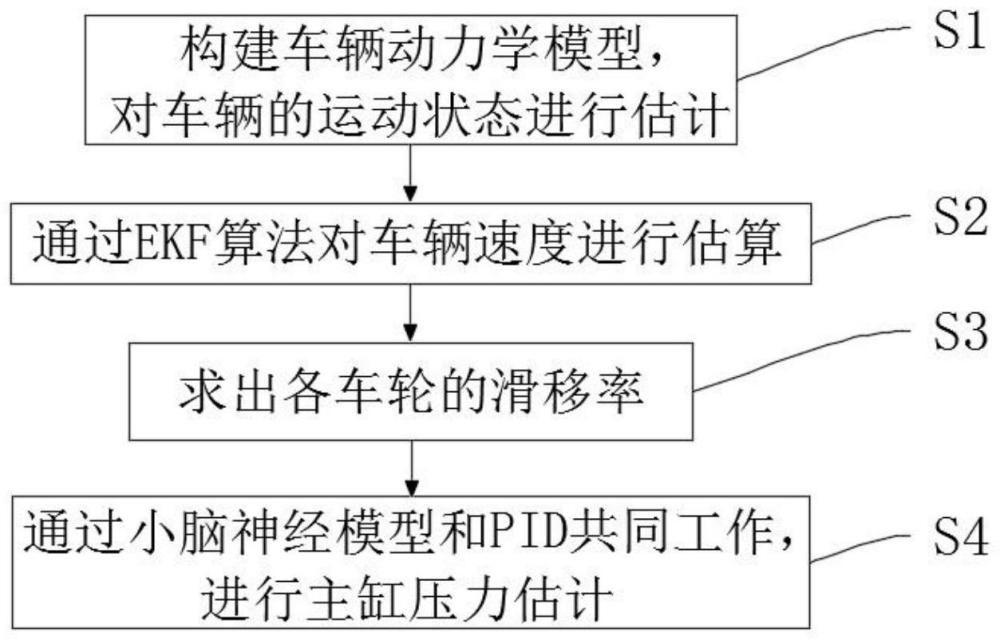
3、s1、构建车辆动力学模型,对车辆的运动状态进行估计:通过建立车辆三自由度车辆模型,结合车辆的整车参数对车辆的运动状态进行估计;
4、s2、通过ekf算法对车辆速度进行估算:根据车辆的运动状态数据,利用ekf算法通过概率对车辆下一步车速进行估算;
5、s3、求出各车轮的滑移率:通过估算出的车速求出各个车轮的滑移率;
6、s4、通过小脑神经模型和pid共同工作,进行主缸压力估计:根据车轮的滑移率和滑移变化率,通过小脑神经模型和pid共同工作,进行车辆电液制动系统主缸压力的估计。
7、优选的,所述步骤s1中,车辆在制动的过程中,车辆的纵向行驶速度、侧向行驶速度以及横摆角的速度会不断发生变化,此时通过这三种速度状态便可以得到车辆整体的行驶情况,然后以车辆的质心位置作为坐标系原点,建立车辆的三自由度模型以模拟车辆在纵向、横向和横摆时的运动,通过构建车辆的运动微分方程,表示车辆的纵向运动、横向运动与横摆运动。
8、优选的,所述步骤s1中,通过非线性的dugoff模型计算车轮所受的纵向力和侧向力,然后通过求解算法利用所受的纵向力和侧向力对车辆的纵向加速度、侧向加速度和质心侧偏角进行求解。
9、优选的,所述步骤s2中,为使制动系统能够在车辆行驶中可以时刻处于最好的工作状态,需要对车辆的状态进行预测,通过ekf进行车速估算,在进行ekf滤波推理时,首先需要对非线性系统的状态以及误差协方差进行赋初值。
10、优选的,所述步骤s2中对非线性系统的状态以及误差协方差进行赋初值之后,需要对下一时刻的系统状态和误差协方差进行预测,通过对下一时刻的系统状态和误差协方差进行预测,以达成对下一时刻的车速进行估算,进而便于后续对下一时刻电液制动系统中主缸压力的目标值进行预测;
11、状态预测算法具体如下:
12、
13、误差协方差预测算法具体如下:
14、
15、其中,表示状态预测值,表示状态估计值,q表示噪声的协方差矩阵,表示误差协方差预测值,pk-1表示误差协方差,φ状态转移矩阵,t表示周期。
16、优选的,所述步骤s2中对下一时刻的系统状态和误差协方差进行预测之后,需要对系统的增益、状态以及误差协方差进行更新,在更新的过程结束后,回转到预测步骤,预测结束之后再进行更新,不断地重复更新迭代,以到达不断地系统状态的预测,以此基于ekf算法得到估算车速,使得车辆制动过程中可以准确地得到车辆的纵向行驶车速。
17、优选的,所述步骤s4中的小脑神经网络模型中,在车辆制动过程中,需要将车轮的滑移率保持在稳定的范围内,以此使得车辆可以保持良好的运动状态,通过小脑神经网络,可以得到在滑移率及滑移率变化率在变化时系统的参数,过程学习需要首先进行量化与映射,对输入空间进行整理后,在神经网络的每个节点中都对应输入样本,然后将激活的神经元权值进行累加后输出计算值,当输出值与期望值出现偏差时,修正相应权值。
18、优选的,所述步骤s4中,由于单纯的pid控制效果受滑移率限制较大,且随着滑移率变化容易导致目标压力的变化过大,故通过小脑神经网络模型与pid共同控制电液制动系统的目标压力,pid控制根据车辆的滑移率计算车辆制动时的主缸压力,小脑神经模型不断学习后,修正车辆的电液制动系统的主缸目标压力,pid控制对压力的控制首先起主导作用,伴随着小脑神经网络模型的不断学习,不断地修正累加得到电液制动系统中的主缸压力,并且结合ekf算法的实时预测更新,从而进行电液制动系统的主缸压力进行实时地估计。
19、与现有技术相比,本发明的有益效果是:
20、本发明通过ekf算法中的状态预测算法与误差协方差预测算法对下一时刻的系统状态和误差协方差进行预测之后,需要对系统的增益、状态以及误差协方差进行更新,在更新的过程结束后,再次进行预测的步骤,当预测结束之后再进行更新步骤,不断地重复更新迭代,以不断地对系统状态进行预测,使得电液制动系统的主缸压力可以不断地预测更新,使得电液制动系统的主缸压力可以被准确地估计,提高了行车的安全性。
技术特征:
1.基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于包括以下步骤:
2.根据权利要求1所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s1中,车辆在制动的过程中,车辆的纵向行驶速度、侧向行驶速度以及横摆角的速度会不断发生变化,此时通过这三种速度状态便可以得到车辆整体的行驶情况,然后以车辆的质心位置作为坐标系原点,建立车辆的三自由度模型以模拟车辆在纵向、横向和横摆时的运动,通过构建车辆的运动微分方程,表示车辆的纵向运动、横向运动与横摆运动。
3.根据权利要求2所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s1中,通过非线性的dugoff模型计算车轮所受的纵向力和侧向力,然后通过求解算法利用所受的纵向力和侧向力对车辆的纵向加速度、侧向加速度和质心侧偏角进行求解。
4.根据权利要求3所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s2中,为使制动系统能够在车辆行驶中可以时刻处于最好的工作状态,需要对车辆的状态进行预测,通过ekf进行车速估算,在进行ekf滤波推理时,首先需要对非线性系统的状态以及误差协方差进行赋初值。
5.根据权利要求4所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s2中对非线性系统的状态以及误差协方差进行赋初值之后,需要对下一时刻的系统状态和误差协方差进行预测,通过对下一时刻的系统状态和误差协方差进行预测,以达成对下一时刻的车速进行估算,进而便于后续对下一时刻电液制动系统中主缸压力的目标值进行预测。
6.根据权利要求5所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s2中对下一时刻的系统状态和误差协方差进行预测之后,需要对系统的增益、状态以及误差协方差进行更新,在更新的过程结束后,回转到预测步骤,预测结束之后再进行更新,不断地重复更新迭代,以到达不断地系统状态的预测,以此基于ekf算法得到估算车速,使得车辆制动过程中可以准确地得到车辆的纵向行驶车速。
7.根据权利要求6所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s4中的小脑神经网络模型中,在车辆制动过程中,需要将车轮的滑移率保持在稳定的范围内,以此使得车辆可以保持良好的运动状态,通过小脑神经网络,可以得到在滑移率及滑移率变化率在变化时系统的参数,过程学习需要首先进行量化与映射,对输入空间进行整理后,在神经网络的每个节点中都对应输入样本,然后将激活的神经元权值进行累加后输出计算值,当输出值与期望值出现偏差时,修正相应权值。
8.根据权利要求7所述的基于ekf算法的电液制动系统的主缸压力估计方法,其特征在于:所述步骤s4中,由于单纯的pid控制效果受滑移率限制较大,且随着滑移率变化容易导致目标压力的变化过大,故通过小脑神经网络模型与pid共同控制电液制动系统的目标压力,pid控制根据车辆的滑移率计算车辆制动时的主缸压力,小脑神经模型不断学习后,修正车辆的电液制动系统的主缸目标压力,pid控制对压力的控制首先起主导作用,伴随着小脑神经网络模型的不断学习,不断地修正累加得到电液制动系统中的主缸压力,并且结合ekf算法的实时预测更新,从而进行电液制动系统的主缸压力进行实时的估计。
技术总结
本发明公开了基于EKF算法的电液制动系统的主缸压力估计方法,涉及电液制动系统技术领域,包括以下步骤:S1、构建车辆动力学模型,对车辆的运动状态进行估计;S2、通过EKF算法对车辆速度进行估算;S3、求出各车轮的滑移率;S4、通过小脑神经模型和PID共同工作,进行主缸压力估计。本发明通过EKF算法中的状态预测算法与误差协方差预测算法对下一时刻的系统状态和误差协方差进行预测之后,需要对系统的增益、状态以及误差协方差进行更新,不断地重复更新迭代,以不断地对系统状态进行预测,使得电液制动系统的主缸压力可以不断地预测更新,使得电液制动系统的主缸压力可以被准确地估计,提高了行车的安全性。
技术研发人员:陈志贤,陈刚,傅涛,黄澄,李阳,张帮雷
受保护的技术使用者:凯晟动力技术(嘉兴)有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!