基于平行仿真的露天矿多编组协同智能调度方法及系统
本公开涉及露天矿智能调度控制,尤其涉及一种基于平行仿真的露天矿多编组协同智能调度方法及系统。
背景技术:
1、露天矿山场景多变,每运行几次都会因为装载位置的推进而重构装载区范围,会因为卸载土方的占用而重构卸载区范围,每运行几小时或几天都会因为更好的道路设计而需重构运输道路。
2、露天矿山环境错综复杂,设备众多且人员操作繁琐,传统调度方法的获取受到环境制约,无法全面反映整个协同系统的实际工作情况,且存在以下诸多问题:1)局限性:传统方法基于简化条件和假设,无法充分考虑露天矿山复杂环境,实际应用有效性受限;2)高风险:实地测试通常风险高,测试过程中可能出现设备故障、操作失误等不可预见情况,带来人员、设备、环境的损害;3)高成本:传统测试方法需长时间实地反复测试,耗费大量时间与资源,增加项目成本与周期;4)可重复性差:实际场地环境不可控,传统测试方法结果波动大、不一致,导致结果分析对比困难,系统性能评估不准确;5)受限于天气和环境因素:露天矿山环境恶劣、天气多变,传统测试方法受限制,无法全面考虑各种因素对跟车协同工作的影响,导致测试结果的不完整和不准确。
技术实现思路
1、有鉴于此,本公开实施例提供了一种基于平行仿真的露天矿多编组协同智能调度方法及系统,能够提供全面、智能、高效、可靠的多编组调度方案,有效降低风险、降低成本、提高调度效率、提高资源利用率,实现运输路径最优化、生产效益最大化,同时确保安全运营。
2、第一方面,本公开实施例提供了一种基于平行仿真的露天矿多编组协同智能调度方法,包括:
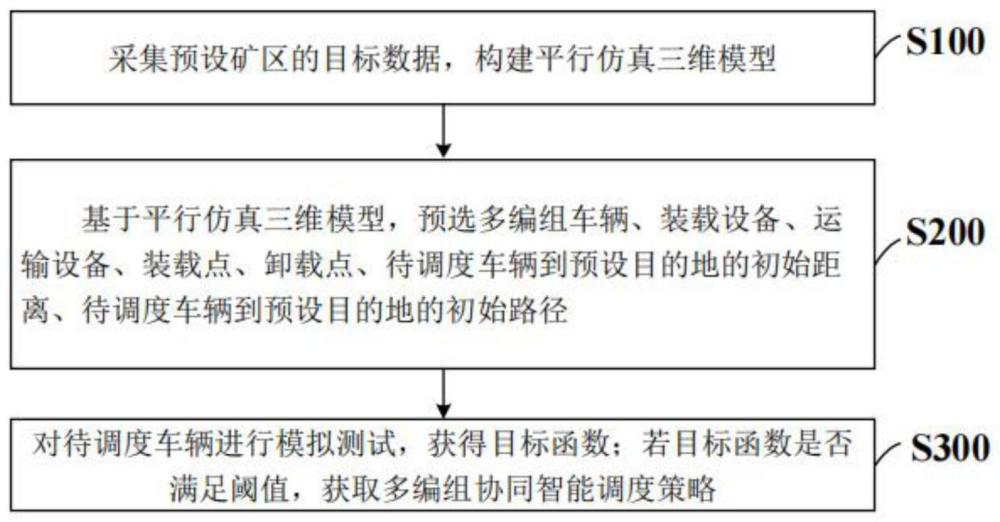
3、采集预设矿区的目标数据,构建平行仿真三维模型;
4、基于所述平行仿真三维模型,预选多编组车辆、装载设备、运输设备、装载点、卸载点、待调度车辆到预设目的地的初始距离、待调度车辆到预设目的地的初始路径;
5、对待调度车辆进行模拟测试,获得目标函数;
6、若所述目标函数是否满足阈值,获取多编组协同智能调度策略。
7、可选地,所述目标数据包括设备元素数据和场景元素数据;
8、所述设备元素数据包括:采掘设备及其数量、运输设备及其数量、卸载设备及其数量、辅助设备及其数量、管理设备及其数量;
9、所述场景元素数据包括:装载区地形数据、卸载区地形数据、运输道路数据。
10、可选地,所述运输设备包括矿卡、宽体车、铰接式卡车中的一种或多种;
11、所述采掘设备包括挖掘机、电铲、装载机中的一种或多种;
12、所述卸载设备包括破碎站;
13、所述辅助设备包括洒水车、平路机、压路机中的一种或多种;
14、所述管理设备包括指挥车、大巴车、面包车中的一种或多种;
15、所述采掘设备及其所配套的所述运输设备构成一个编组。
16、可选地,所述构建平行仿真三维模型,包括:
17、创建初始模型,根据卫星图像、无人机倾斜摄影数据进行uv创建,获得第一模型;
18、通过贴图绘制及倾斜摄影数据对所述第一模型进行贴图处理,获得第二模型;
19、整理所述第二模型,获得所述平行仿真三维模型。
20、可选地,所述若所述目标函数是否满足阈值,获取多编组协同智能调度策略,包括:若所述目标函数大于预设吞吐量,获取多编组协同智能调度策略;
21、所述目标函数为:
22、其中,ns表示所述装载设备的数量、ms表示卸载点的数量、k为运输设备型号、wk为k型车载重、qijk为预设时间内装载点i到卸载点j的车次。
23、可选地,所述若所述目标函数是否满足阈值,获取多编组协同智能调度策略,包括:若所述目标函数小于预设单位消耗油量,获取多编组协同智能调度策略;
24、所述目标函数为:
25、
26、
27、
28、其中,k为运输设备型号、wk为k型车载重、qijk为预设时间内装载点i到卸载点j的车次、c表示运输设备数量、sn表示装载作业运距、snij表示重载运输运距、sm表示卸载作业运距、smji表示空载运输运距、l0表示设备初始油量、lc表示当班累计油量、ln表示设备当前剩余油量。
29、可选地,所述若所述目标函数是否满足阈值,获取多编组协同智能调度策略,包括:若所述目标函数不小于预设行驶评价因子,获取多编组协同智能调度策略;
30、所述目标函数为:
31、
32、
33、其中,qijk为预设时间内装载点i到卸载点j的车次、sn表示装载作业运距、snij表示重载运输运距、sm表示卸载作业运距、smji表示空载运输运距、l0表示设备初始油量、lc表示当班累计油量、ln表示设备当前剩余油量、tn表示装载区作业时长、tnij表示重载运输时长、tm表示卸载区作业时长、tmji表示空载运输时长。
34、可选地,所述预设行驶评价因子为1。
35、可选地,所述预设矿区为封闭/半封闭的矿区。
36、第二方面,本公开实施例还提供了一种基于平行仿真的露天矿多编组协同智能调度系统,包括:
37、构建模块,配置为采集预设矿区的目标数据,构建平行仿真三维模型;
38、预选模块,配置为基于所述平行仿真三维模型,预选多编组车辆、装载设备、运输设备、装载点、卸载点、待调度车辆到预设目的地的初始距离、待调度车辆到预设目的地的初始路径;
39、处理模块,配置为对待调度车辆进行模拟测试,获得目标函数;
40、若所述目标函数是否满足阈值,获取多编组协同智能调度策略。
41、第三方面,本公开实施例还提供了一种电子设备,采用如下技术方案:
42、所述电子设备包括:
43、至少一个处理器;以及,
44、与所述至少一个处理器通信连接的存储器;其中,
45、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行以上任一所述的基于平行仿真的露天矿多编组协同智能调度方法。
46、第四方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储计算机指令,该计算机指令用于使计算机执行以上任一所述的基于平行仿真的露天矿多编组协同智能调度方法。
47、本技术公开的方法,可以有效的应用于露天矿山、多编组、协同智能调度场景,有所针对、贴合实际、灵活多变,通过采集场景内最大限度的交通参与者信息,同时构建不同维度的数字孪生场景,指引场景内多编组协同智能调度,为最终的实际生产作业提供引导,最大化的提高算法的有效性和合理性,从而最终实现作业效率的最大提升。具体地,1)可以提高矿山作业效率:通过预先采集目标数据和构建平行仿真三维模型,对多编组车辆、装载设备、运输设备等进行预选和模拟测试,可以更有效地规划和调度矿山作业流程,提高作业效率;2)优化资源利用:通过智能调度策略,可以更好地协调多个编组的车辆和设备,避免资源闲置和重复利用,最大程度地优化资源利用效率;3)提升安全性:通过模拟测试获得的目标函数可以帮助优化调度策略,使得矿山作业过程更加安全可靠,减少事故风险;4)减少能源消耗:优化调度策略能够减少车辆和设备的不必要行驶和等待时间,从而减少能源的消耗,降低作业成本;5)实现智能化管理:引入协同智能调度方法,可以实现对矿山作业的智能化管理和监控,提升矿山作业的整体水平和可持续发展能力。
48、上述说明仅是本公开技术方案的概述,为了能更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为让本公开的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!