巡检事件的提取处理方法及相关服务器和介质程序与流程
本技术涉及到智能制造,尤其涉及到巡检事件的提取处理方法及相关服务器和介质程序。
背景技术:
1、在推进新型工业化背景下,智慧工厂越来越多的被部署。智慧工厂力求打破工序壁垒,通过大数据实现对产品生产过程质量信息采集、质量设计、质量监控、在线质量判定、过程质量追溯和质量分析改进等,甚至可以对影响产品质量的重要工艺参数实施在线监控及预警将成为大势所趋。而这些工作的基础就是将散落在各产线、各系统中的生产质量数据进行采集和数字化。
2、巡检机器人被越来越多的应用到智慧工厂中,巡检机器人在巡检过中将上报巡检报告,如何尽量筛选出巡检报告中的有效巡检事件记录,是需要特别研究的一个技术课题。
技术实现思路
1、本技术实施例提供机器人巡检数据处理方法和相关系统,有利于尽量筛选出巡检报告中的有效巡检事件记录,进而可为基于巡检事件记录做出更科学分析决策奠定好基础。
2、本技术实施例第一方面提供一种机器人巡检数据处理方法,所述机器人巡检数据处理方法应用于智慧工厂巡检系统,其中,所述智慧工厂巡检系统包括巡检报告处理服务器、巡检组件分发服务器和巡检机器人集群;所述巡检机器人集群中的每个巡检机器人均与巡检组件分发服务器通信连接;所述巡检机器人集群中的每个巡检机器人均与巡检报告处理服务器通信连接;所述巡检组件分发服务器用于向巡检机器人分发用于进行巡检的巡检组件;
3、其中,
4、所述巡检机器人集群包括第一巡检机器人和第二巡检机器人,所述智慧工厂包括多个巡检范围,所述第一巡检机器人和第二巡检机器人在所述多个巡检范围中的第一巡检范围内进行巡检;其中,所述第一巡检范围内设置有p0个巡检测试标,所述p0个巡检测试标中任意两个相邻巡检测试标的间距不超过间距阈值其中,所述p0为大于2的整数;
5、其中,所述方法包括:
6、所述第一巡检机器人按照第一巡检路径在第一巡检范围进行巡检,并在遍历1次第一巡检路径后生成第一巡检报告,所述第一巡检报告中包括以按巡检时间先后顺序排列的a1条巡检事件记录,每条巡检事件记录对应于所述第一巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;第一巡检路径经过p0个巡检测试标中的p个巡检测试标,所述p个巡检测试标中任意两个相邻巡检测试标的间距不超过间距阈值
7、所述巡检报告处理服务器在接收到来自所述第一巡检机器人的第一巡检报告之后,读取所述第一巡检报告中包含的a1条巡检事件记录,并对所述a1条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中;
8、其中,对所述a1条巡检事件记录执行有效巡检事件记录提取操作包括:
9、在第一数据库中读取出与所述p个巡检测试标一一对应的p个巡检测试事件特征组;查找所述a1条巡检事件记录中是否包含有与所述p个巡检测试事件特征组一一对应的p个巡检事件记录;其中,若查找到所述a1条巡检事件记录中包含有与所述p个巡检测试事件特征组一一对应的p个巡检事件记录,则将所述a1条巡检事件记录中包含的所述p个巡检事件记录进行筛除处理以得到a1-p个巡检事件记录,将所述a1-p个巡检事件记录全部作为提取到的有效巡检事件记录。
10、在一些可能的实施方式中,对所述a1条巡检事件记录执行有效巡检事件提取操作,还包括:
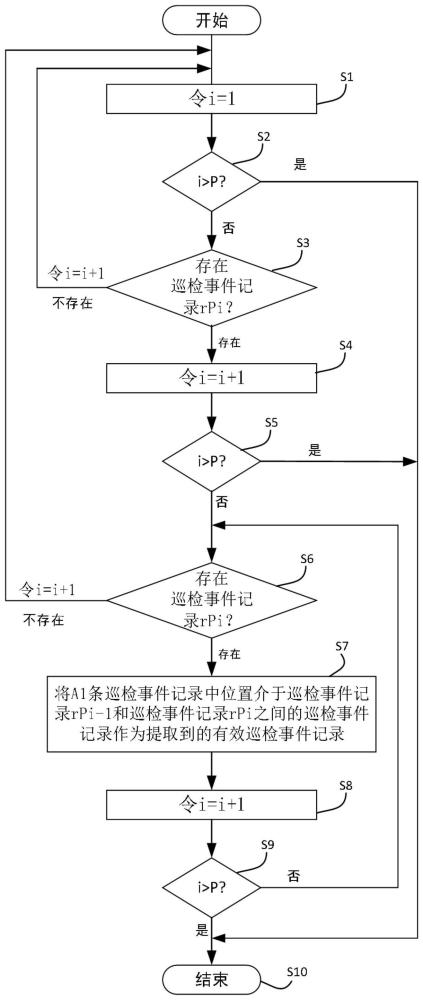
11、若查找到所述a1条巡检事件记录中只包含有与p1个巡检测试事件特征组一一对应的p1个巡检事件记录,则执行步骤s1-s10;所述p1个巡检测试事件特征组为所述p个巡检测试事件特征组中的部分巡检测试事件特征组,所述p个巡检测试事件特征组的排序,与所述p个巡检测试标在第一巡检路径中出现的先后顺序相对应;其中,所述p1个巡检测试事件特征组对应于所述p个巡检测试标中的p1个巡检测试标;
12、步骤s1.令i=1;
13、步骤s2.判断i是否大于p;
14、若否,则执行步骤s3;
15、若是,则执行步骤s10;
16、步骤s3.在所述a1条巡检事件记录中查找是否存在与所述p个巡检测试特征组中的第i个巡检测试事件特征组对应的巡检事件记录rpi;
17、若不存在,令i=i+1,返回步骤s2;
18、若存在,执行步骤s4;
19、步骤s4.令i=i+1。
20、步骤s5.判断i是否大于p;
21、若否,则执行步骤s6;
22、若是,则执行步骤s10;
23、步骤s6.在所述a1条巡检事件记录中查找是否存在与所述p个巡检测试特征组中的第i个巡检测试特征组对应的巡检事件记录rpi;
24、若不存在,令i=i+1,并返回步骤s2;
25、若存在,执行步骤s7;
26、步骤s7.将所述a1条巡检事件记录中位置介于巡检事件记录rpi-1和巡检事件记录rpi之间的巡检事件记录作为提取到的有效巡检事件记录;
27、步骤s8.令i=i+1;
28、步骤s9.判断i是否大于p;
29、若否,则执行步骤s6;
30、若是,则执行步骤s10;
31、步骤s10.结束有效巡检事件记录提取操作。
32、可以理解,当某个巡检测试标对应的巡检事件记录缺失,那么很可能巡检路径上与这个巡检测试标相邻位置的巡检准确性很可能存疑,与之相关的巡检事件记录可能是无效的巡检事件记录,故而将其进行筛除,进而为基于巡检事件记录做出更科学分析决策奠定好基础。
33、在一些可能的实施方式中,所述第一巡检机器人中激活了所述x1个扩展巡检组件和所述n个基础巡检组件;所述第二巡检机器人中激活了所述x1个扩展巡检组件和所述n个基础巡检组件;其中,激活的所述x1个扩展巡检组件和所述n个基础巡检组件用于对所述第一巡检范围进行巡检;
34、其中,所述方法包括:
35、所述第二巡检机器人按照第二巡检路径在第一巡检范围进行巡检,并在遍历1次第二巡检路径后生成第二巡检报告,所述第二巡检报告中包括以按巡检时间先后顺序排列的a2条巡检事件记录,每条巡检事件记录对应于所述第二巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;其中,所述第一巡检路径和第二巡检路径不同;
36、所述巡检报告处理服务器在接收到来自所述第二巡检机器人的第二巡检报告之后,读取所述第二巡检报告中包含的a2条巡检事件记录,并对所述a2条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中。
37、在一些可能的实施方式中,所述方法还包括:
38、若查找到所述a1条巡检事件记录中只包含有与p1个巡检测试事件特征组一一对应的p1个巡检事件记录,所述巡检报告处理服务器判断所述第二巡检路径是否经过p2个巡检测试标,所述p2个巡检测试标为所述p个巡检测试标中的除p1个巡检测试标之外的剩余巡检测试标;
39、若所述第二巡检路径未经过所述p2个巡检测试标,所述巡检报告处理服务器向所述第二巡检机器人发送第三巡检路径生效命令,其中,所述第三巡检路径生效命令用于指示生效第三巡检路径,其中,所述第三巡检路径经过所述p2个巡检测试标;
40、所述第二巡检机器人在接收到所述第三巡检路径生效命令之后,按照第三巡检路径在第一巡检范围进行巡检,并在遍历1次第三巡检路径后生成第三巡检报告,所述第三巡检报告中包括以按巡检时间先后顺序排列的a3条巡检事件记录,每条巡检事件记录对应于所述第二巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;
41、所述巡检报告处理服务器在接收到来自所述第二巡检机器人的第三巡检报告之后,读取所述第三巡检报告中包含的a3条巡检事件记录,并对所述a3条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中。
42、在一些可能的实施方式中,所述方法还包括:
43、若查找到所述a1条巡检事件记录中只包含有与p1个巡检测试事件特征组一一对应的p1个巡检事件记录,所述巡检报告处理服务器判断所述第二巡检路径是否经过p2个巡检测试标,所述p2个巡检测试标为所述p个巡检测试标中的除p1个巡检测试标之外的剩余巡检测试标;
44、若所述第二巡检路径未经过所述p2个巡检测试标,所述巡检报告处理服务器向所述巡检组件分发服务器发送第三巡检路径生效命令,所述第三巡检路径生效命令用于指示生效第三巡检路径,所述第三巡检路径经过所述p2个巡检测试标;
45、所述巡检组件分发服务器向所述巡检机器人集群处于空闲态的第三巡检机器人转发第三巡检路径生效命令;
46、所述第三巡检机器人在接收到所述第三巡检路径生效命令之后由空闲态变更为巡检态,并按照第三巡检路径在第一巡检范围进行巡检,并在遍历1次第三巡检路径后生成第四巡检报告,其中,所述第四巡检报告中包括以按巡检时间先后顺序排列的a4条巡检事件记录,每条巡检事件记录对应于所述第三巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;
47、所述巡检报告处理服务器在接收到来自所述第三巡检机器人的第四巡检报告之后,读取所述第四巡检报告中包含的a4条巡检事件记录,并对所述a4条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中。
48、本技术实施例第二方面提供一种智慧工厂巡检系统,所述智慧工厂巡检系统包括巡检报告处理服务器、巡检组件分发服务器和巡检机器人集群;所述巡检机器人集群中的每个巡检机器人均与巡检组件分发服务器通信连接;所述巡检机器人集群中的每个巡检机器人均与巡检报告处理服务器通信连接;所述巡检组件分发服务器用于向巡检机器人分发用于进行巡检的巡检组件;
49、其中,
50、所述巡检机器人集群包括第一巡检机器人和第二巡检机器人,所述智慧工厂包括多个巡检范围,所述第一巡检机器人和第二巡检机器人在所述多个巡检范围中的第一巡检范围内进行巡检;其中,所述第一巡检范围内设置有p0个巡检测试标,所述p0个巡检测试标中任意两个相邻巡检测试标的间距不超过间距阈值其中,其中,所述p0为大于2的整数;
51、其中,所述第一巡检机器人,用于按照第一巡检路径在第一巡检范围进行巡检,并在遍历1次第一巡检路径后生成第一巡检报告,所述第一巡检报告中包括以按巡检时间先后顺序排列的a1条巡检事件记录,每条巡检事件记录对应于所述第一巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;其中,第一巡检路径经过p0个巡检测试标中的p个巡检测试标,所述p个巡检测试标中任意两个相邻巡检测试标的间距不超过间距阈值;
52、所述巡检报告处理服务器,用于在接收到来自所述第一巡检机器人的第一巡检报告之后,读取所述第一巡检报告中包含的a1条巡检事件记录,并对所述a1条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中;
53、其中,对所述a1条巡检事件记录执行有效巡检事件记录提取操作包括:
54、在第一数据库中读取出与所述p个巡检测试标一一对应的p个巡检测试事件特征组;查找所述a1条巡检事件记录中是否包含有与所述p个巡检测试事件特征组一一对应的p个巡检事件记录;其中,若查找到所述a1条巡检事件记录中包含有与所述p个巡检测试事件特征组一一对应的p个巡检事件记录,则将所述a1条巡检事件记录中包含的所述p个巡检事件记录进行筛除处理以得到a1-p个巡检事件记录,将所述a1-p个巡检事件记录全部作为提取到的有效巡检事件记录。
55、在一些可能的实施方式中,对所述a1条巡检事件记录执行有效巡检事件提取操作,还包括:
56、若查找到所述a1条巡检事件记录中只包含有与p1个巡检测试事件特征组一一对应的p1个巡检事件记录,则执行步骤s1-s10;所述p1个巡检测试事件特征组为所述p个巡检测试事件特征组中的部分巡检测试事件特征组,所述p个巡检测试事件特征组的排序,与所述p个巡检测试标在第一巡检路径中出现的先后顺序相对应;其中,所述p1个巡检测试事件特征组对应于所述p个巡检测试标中的p1个巡检测试标;
57、步骤s1.令i=1;
58、步骤s2.判断i是否大于p;
59、若否,则执行步骤s3;
60、若是,则执行步骤s10;
61、步骤s3.在所述a1条巡检事件记录中查找是否存在与所述p个巡检测试特征组中的第i个巡检测试事件特征组对应的巡检事件记录rpi;
62、若不存在,令i=i+1,返回步骤s2;
63、若存在,执行步骤s4;
64、步骤s4.令i=i+1;
65、步骤s5.判断i是否大于p;
66、若否,则执行步骤s6;
67、若是,则执行步骤s10;
68、步骤s6.在所述a1条巡检事件记录中查找是否存在与所述p个巡检测试特征组中的第i个巡检测试特征组对应的巡检事件记录rpi;
69、若不存在,令i=i+1,并返回步骤s2;
70、若存在,执行步骤s7;
71、步骤s7.将所述a1条巡检事件记录中位置介于巡检事件记录rpi-1和巡检事件记录rpi之间的巡检事件记录作为提取到的有效巡检事件记录;
72、步骤s8.令i=i+1;
73、步骤s9.判断i是否大于p;
74、若否,则执行步骤s6;
75、若是,则执行步骤s10;
76、步骤s10.结束有效巡检事件记录提取操作。
77、在一些可能的实施方式中,所述第一巡检机器人中激活了所述x1个扩展巡检组件和所述n个基础巡检组件;所述第二巡检机器人中激活了所述x1个扩展巡检组件和所述n个基础巡检组件;其中,激活的所述x1个扩展巡检组件和所述n个基础巡检组件用于对所述第一巡检范围进行巡检;
78、其中,所述第二巡检机器人,用于按照第二巡检路径在第一巡检范围进行巡检,并在遍历1次第二巡检路径后生成第二巡检报告,所述第二巡检报告中包括以按巡检时间先后顺序排列的a2条巡检事件记录,每条巡检事件记录对应于所述第二巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;其中,所述第一巡检路径和第二巡检路径不同;
79、所述巡检报告处理服务器,用于在接收到来自所述第二巡检机器人的第二巡检报告之后,读取所述第二巡检报告中包含的a2条巡检事件记录,并对所述a2条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中。
80、在一些可能的实施方式中,所述巡检报告处理服务器用于,若查找到所述a1条巡检事件记录中只包含有与p1个巡检测试事件特征组一一对应的p1个巡检事件记录,判断所述第二巡检路径是否经过p2个巡检测试标,其中,所述p2个巡检测试标为所述p个巡检测试标中的除p1个巡检测试标之外的剩余巡检测试标;若所述第二巡检路径未经过所述p2个巡检测试标,向所述第二巡检机器人发送第三巡检路径生效命令,所述第三巡检路径生效命令用于指示生效第三巡检路径,所述第三巡检路径经过所述p2个巡检测试标;
81、所述第二巡检机器人用于在接收到所述第三巡检路径生效命令之后,按照第三巡检路径在第一巡检范围进行巡检,并在遍历1次第三巡检路径后生成第三巡检报告,所述第三巡检报告中包括以按巡检时间先后顺序排列的a3条巡检事件记录,每条巡检事件记录对应于所述第二巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;
82、所述巡检报告处理服务器还用于,在接收到来自所述第二巡检机器人的第三巡检报告之后,读取所述第三巡检报告中包含的a3条巡检事件记录,并对所述a3条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中。
83、在一些可能的实施方式中,所述巡检报告处理服务器用于,若查找到所述a1条巡检事件记录中只包含有与p1个巡检测试事件特征组一一对应的p1个巡检事件记录,判断所述第二巡检路径是否经过p2个巡检测试标,其中,所述p2个巡检测试标为所述p个巡检测试标中的除p1个巡检测试标之外的剩余巡检测试标;若所述第二巡检路径未经过所述p2个巡检测试标,向所述巡检组件分发服务器发送第三巡检路径生效命令,所述第三巡检路径生效命令用于指示生效第三巡检路径,所述第三巡检路径经过所述p2个巡检测试标;
84、所述巡检组件分发服务器用于,向所述巡检机器人集群处于空闲态的第三巡检机器人转发第三巡检路径生效命令;
85、所述第三巡检机器人用于,在接收到所述第三巡检路径生效命令之后由空闲态变更为巡检态,并按照第三巡检路径在第一巡检范围进行巡检,并在遍历1次第三巡检路径后生成第四巡检报告,所述第四巡检报告中包括以按巡检时间先后顺序排列的a4条巡检事件记录,每条巡检事件记录对应于所述第三巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;
86、所述巡检报告处理服务器用于,在接收到来自所述第三巡检机器人的第四巡检报告之后,读取所述第四巡检报告中包含的a4条巡检事件记录,并对所述a4条巡检事件记录执行有效巡检事件记录提取操作,并将提取到的有效巡检事件记录写入到第二数据库中。
87、本技术实施例第三方面提供一种计算机存储介质,所述计算机存储介质存储有计算机程序,其中,当所述计算机程序被部署在巡检机器人中,能够使得巡检机器人执行第一方面由第一巡检机器人或其他巡检机器人执行的部分或全部操作。
88、本技术实施例第四方面提供一种计算机程序,当所述计算机程序被部署在巡检机器人中,能够使得巡检机器人执行第一方面由第一巡检机器人或其他巡检机器人执行的部分或全部操作。
89、可以看出,本技术实施例之中,第一巡检机器人按照第一巡检路径在第一巡检范围进行巡检,并在遍历1次第一巡检路径后生成第一巡检报告,所述第一巡检报告中包括以按巡检时间先后顺序排列的a1条巡检事件记录,每条巡检事件记录对应于所述第一巡检机器人在巡检过程中发现的1个告警事件的事件类型、事件发生时间和事件发生位置;所述巡检报告处理服务器在接收到来自所述第一巡检机器人的第一巡检报告之后,并对所述a1条巡检事件记录执行有效巡检事件记录提取操作,并且将提取到的有效巡检事件记录写入到第二数据库中;对a1条巡检事件记录执行有效巡检事件记录提取操作包括:在第一数据库中读取出与p个巡检测试标一一对应的p个巡检测试事件特征组;查找所述a1条巡检事件记录中是否包含有与所述p个巡检测试事件特征组一一对应的p个巡检事件记录;若查找到所述a1条巡检事件记录中包含有与所述p个巡检测试事件特征组一一对应的p个巡检事件记录,则将所述a1条巡检事件记录中包含的p个巡检事件记录进行筛除处理以得到a1-p个巡检事件记录,将所述a1-p个巡检事件记录全部作为提取到的有效巡检事件记录。其中,通过在巡检路径上设置巡检测试标,巡检报告处理服务器对巡检报告中的巡检事件记录执行有效巡检事件记录提取操作时参考p个巡检测试标一一对应的p个巡检测试事件特征组,这样有利于尽量筛选出巡检报告中的有效巡检事件记录,进而可为基于巡检事件记录做出更科学分析决策奠定好基础。
- 还没有人留言评论。精彩留言会获得点赞!