飞行轨迹优化显示方法、装置、电子设备及计算机可读存储介质与流程
本申请涉及图像识别,尤其涉及一种飞行轨迹优化显示方法、装置、电子设备及计算机可读存储介质。
背景技术:
1、现有的行驶轨迹显示技术中,主要是基于二维实现的,应用场景大部分是优化车辆的行驶轨迹,具体实现方式一般是曲线拟合或者曲线插值,但是曲线拟合的方式不能保证最终轨迹经过所有轨迹点,曲线插值的方式会增大轨迹数据且无法有效抗抖动,如果针对飞行器的三维飞行数据,因为gps采集的位置数据在一定幅度范围内存在严重的抖动问题,现有技术在针对飞行器的三维飞行数据构建飞行轨迹时,无法同时解决轨迹平滑性和抗抖动的问题。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种飞行轨迹优化显示方法、装置、电子设备及计算机可读存储介质,绘制的飞行轨迹路线更平滑,且能够有效抗抖动。
2、本申请第一方面提供一种飞行轨迹优化显示方法,包括:
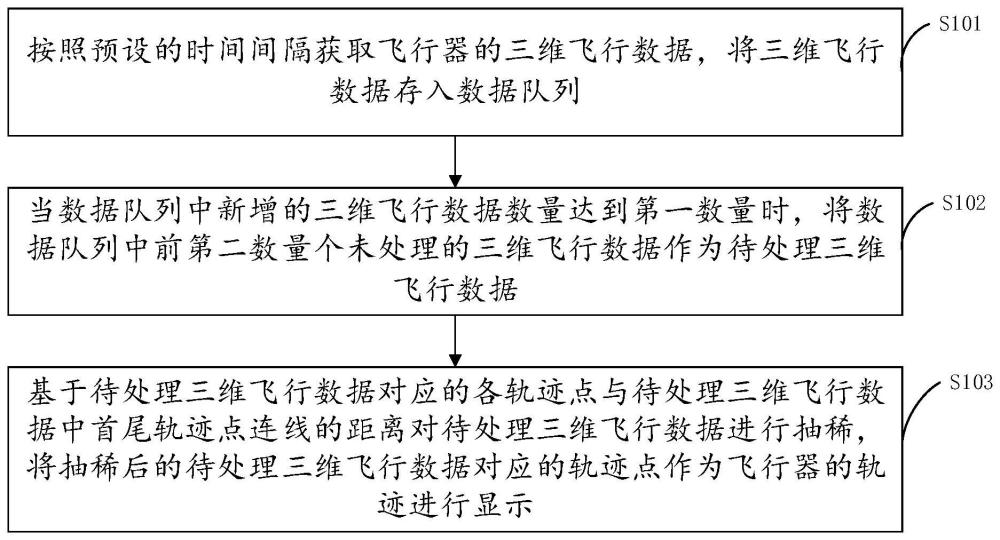
3、按照预设的时间间隔获取飞行器的三维飞行数据,将所述三维飞行数据存入数据队列;
4、当所述数据队列中新增的三维飞行数据数量达到第一数量时,将所述数据队列中前第二数量个未处理的三维飞行数据作为待处理三维飞行数据;
5、基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,将抽稀后的待处理三维飞行数据对应的轨迹点作为所述飞行器的轨迹进行显示。
6、作为本申请一种可能的实施方式,在该实施方式中,所述将所述数据队列中前第二数量个未处理的三维飞行数据作为待处理三维飞行数据,包括:
7、若所述数据队列中不存在处理过的三维飞行数据,则在所述第一数量个新增的三维飞行数据中选取前第二数量个三维飞行数据作为待处理三维飞行数据,所述第二数量小于第一数量;
8、若所述数据队列中存在处理过的三维飞行数据,则从所述数据队列中第一个未处理三维飞行数据开始,选择第二数量个三维飞行数据作为待处理三维飞行数据,所述第二数量小于第一数量。
9、作为本申请一种可能的实施方式,在该实施方式中,所述将所述三维飞行数据存入数据队列之后,所述方法包括:
10、检查所述数据队列的长度,当所述数据队列的长度超出预设的长度阈值时,将所述数据队列中前第三数量个处理过的三维飞行数据从所述数据队列中删除,以使所述数据队列的长度小于所述长度阈值。
11、作为本申请一种可能的实施方式,在该实施方式中,所述三维飞行数据包括所述飞行器的经度、维度和海拔高度,所述基于所述待处理三维飞行数据对应的各轨迹点距离所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀之前,所述方法包括:
12、基于所述经度和维度的精度,采用第一卡尔曼滤波算法对所述三维飞行数据的经度和纬度进行处理,基于所述海拔高度的精度,采用第二卡尔曼滤波算法对所述三维飞行数据的海拔高度进行处理,得到处理后的经度、处理后的维度和处理后的海拔高度,并将所述处理后的经度、处理后的维度和处理后的海拔高度作为待处理三维飞行数据。
13、作为本申请一种可能的实施方式,在该实施方式中,所述基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,包括:
14、基于所述待处理三维飞行数据中各数据点的经度和纬度计算轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离;
15、当所述距离都小于预设的距离阈值时,所述待处理三维飞行数据中除所述首尾轨迹点的其它轨迹点去除。
16、作为本申请一种可能的实施方式,在该实施方式中,当所述距离大于所述预设距离阈值时,将所述待处理三维飞行数据对应的轨迹点作为待处理轨迹段,所述基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,包括:
17、步骤s1,将距离大于所述预设距离阈值的待处理三维飞行数据对应的轨迹点作为轨迹分割点,执行步骤s2,;
18、步骤s2,将第一轨迹点与所述轨迹分割点之间的轨迹点作为第一轨迹段,将所述轨迹分割点与第二轨迹点之间的轨迹点作为第二轨迹段;所述第一轨迹点为待处理轨迹段中的第一个轨迹点,所述第二轨迹点为待处理轨迹段中的最后一个轨迹点,执行步骤s3;
19、步骤s3,将所述第一轨迹段和所述第二轨迹段分别作为新的待处理轨迹段,计算所述新的待处理轨迹段中各轨迹点与所述新的待处理轨迹段中首尾轨迹点连线的距离;当所述距离大于预设的距离阈值时,返回执行步骤s1,直至没有距离大于预设距离阈值。
20、作为本申请一种可能的实施方式,在该实施方式中,所述将抽稀后的待处理三维飞行数据对应的轨迹点作为所述飞行器的轨迹进行显示,包括:
21、基于抽稀后得到的多个轨迹段中首尾轨迹点对应的三维飞行数据的获取时间,将所述多个轨迹段按照所述获取时间的先后顺序进行拼接,得到所述飞行器的飞行轨迹,将所述飞行轨迹进行展示。
22、本申请第二方面提供一种飞行轨迹优化显示装置,包括:
23、数据获取模块,用于按照预设的时间间隔获取飞行器的三维飞行数据,将所述三维飞行数据存入数据队列;
24、数据选择模块,用于当所述数据队列中新增的三维飞行数据数量达到第一数量时,将所述数据队列中前第二数量个未处理的三维飞行数据作为待处理三维飞行数据;
25、轨迹优化模块,用于基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,将抽稀后的待处理三维飞行数据对应的轨迹点作为所述飞行器的轨迹进行显示。
26、本申请第三方面提供一种电子设备,包括:
27、处理器;以及
28、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
29、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被车辆的处理器执行时,使所述处理器执行如上所述的方法。
30、本申请实施例按照预设的时间间隔获取飞行器的三维飞行数据,并经该三维飞行数据存入数据队列,根据数据队列中新增三维数据的数量,在数据队列中选择前一定数量的为处理过的三维飞行数据作为待处理数据进行处理,能够保证每次处理的都是为处理过的数据,且对于最新的三维飞行数据,会保留一段时间,保证用户看到的最新轨迹点是真实的轨迹点;通过将待处理三维飞行数据进行抽稀,能够保证绘制的飞行轨迹的平滑性。
31、此外,本申请还根据三维飞行数据中各维度数据的精度,采用卡尔曼滤波对三维飞行数据中的经度、纬度以及海拔高度进行滤波,能够有效减少三维飞行数据在各个维度的抖动,降低飞行轨迹的抖动。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种飞行轨迹优化显示方法,其特征在于,包括:
2.根据权利要求1所述的飞行轨迹优化显示方法,其特征在于,所述将所述数据队列中前第二数量个未处理的三维飞行数据作为待处理三维飞行数据,包括:
3.根据权利要求2所述的飞行轨迹优化显示方法,其特征在于,所述将所述三维飞行数据存入数据队列之后,所述方法包括:
4.根据权利要求1所述的飞行轨迹优化显示方法,其特征在于,所述三维飞行数据包括所述飞行器的经度、维度和海拔高度,所述基于所述待处理三维飞行数据对应的各轨迹点距离所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀之前,所述方法包括:
5.根据权利要求1所述的飞行轨迹优化显示方法,其特征在于,所述基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,包括:
6.根据权利要求5所述的飞行轨迹优化显示方法,其特征在于,当所述距离大于所述预设距离阈值时,将所述待处理三维飞行数据对应的轨迹点作为待处理轨迹段,所述基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,包括:
7.根据权利要求6所述的飞行轨迹优化显示方法,其特征在于,所述将抽稀后的待处理三维飞行数据对应的轨迹点作为所述飞行器的轨迹进行显示,包括:
8.一种飞行轨迹优化显示装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-6中任一项所述的方法。
技术总结
本申请涉及一种飞行轨迹优化显示方法、装置、电子设备及计算机可读存储介质。该方法包括按照预设的时间间隔获取飞行器的三维飞行数据,将所述三维飞行数据存入数据队列;当所述数据队列中新增的三维飞行数据数量达到第一数量时,将所述数据队列中前第二数量个未处理的三维飞行数据作为待处理三维飞行数据;基于所述待处理三维飞行数据对应的各轨迹点与所述待处理三维飞行数据中首尾轨迹点连线的距离对所述待处理三维飞行数据进行抽稀,将抽稀后的待处理三维飞行数据对应的轨迹点作为所述飞行器的轨迹进行显示,本申请绘制的飞行轨迹路线更平滑,且能够有效抗抖动。
技术研发人员:赖智聪
受保护的技术使用者:广东汇天航空航天科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!