基于边坍缩网格优化的飞行器仿真驱动设计方法和装置
本技术涉及航空飞行器的仿真驱动,特别是涉及一种基于边坍缩网格优化的飞行器仿真驱动设计方法和装置。
背景技术:
1、随着计算机技术的迅猛发展,计算流体力学(computational fluid dynamics,cfd)数值仿真技术已经成为飞行器气动外形设计过程中性能分析的重要手段。在飞行器外形设计完成后,一般会根据设计的几何模型增加远场包围,进而生成可供cfd数值仿真软件计算的网格文件,在运用有限体积法或有限元法等仿真计算后评估并优化飞行器的外形设计方案。其中,cfd数值仿真的一个重要前处理步骤是通过优化技术进一步提高飞行器模型对应初始网格的单元质量,从而使得后续计算更易收敛,计算结果更加准确。cfd数值仿真在每个网格单元或网格节点上存储温度、速度、密度等物理量,然后利用物理守恒方程求解给定工况下的物理解,从而得到各网格单元或网格节点上的物理量,并通过相关计算公式获得飞行器的升力系数、阻力系数等性能指标。因此,优化后的网格单元质量对仿真结果影响巨大,从而影响飞行器设计方案的外流场性能。此外,网格优化算法的鲁棒性也往往会极大影响网格单元的质量,从而影响飞行器设计方案的仿真结果。
2、通常依据网格节点的拓扑连接方式将待优化网格分为结构网格和非结构网格。其中,非结构网格中由于网格节点连接关系随机分布,网格单元的局部可控性好,因此能够较好地适用于复杂几何体的边界和网格局部优化,被广泛应用于数值求解的各个领域,是当前网格优化技术的主要研究目标。
3、飞行器仿真驱动设计方案的优化依赖cfd计算结果,而若想快速获得准确的仿真结果,则存在一个关键前提,即是cfd前处理得到高质量的网格。针对飞行器模型的复杂区域,只单纯使用常规的网格生成方法很难直接生成高质量的网格单元,因此在网格单元生成后,使用网格优化方法来对现有网格单元进行拓扑结构和网格单元分布的优化显得尤为关键和必要。其中拉普拉斯(laplacian)网格优化算法是近年来被广泛使用的网格优化算法,该算法对于每个节点定义一个拉普拉斯算子来确定其的调整方向,通过沿调整方向以一定的速度移动节点来调整网格。但对于复杂外形的网格,基于拉普拉斯方法的网格优化算法的时间复杂度较高,且该方法只能移动网格节点不改变拓扑连接关系,优化范围有限,导致网格优化的时间过长且优化幅度有限,从而影响cfd仿真的计算结果和收敛效率,由此限制了飞行器仿真驱动设计的周期。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于边坍缩网格优化的飞行器仿真驱动设计方法和装置。
2、一种基于边坍缩网格优化的飞行器仿真驱动设计方法,所述方法包括:
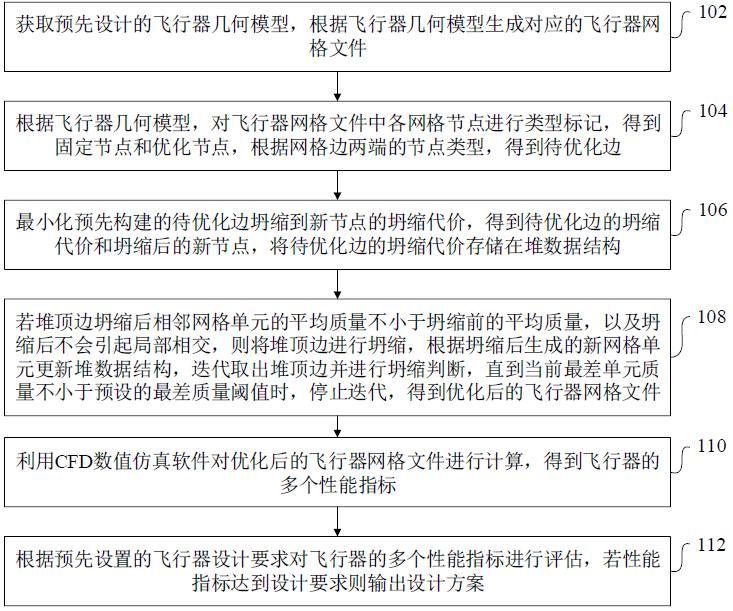
3、获取预先设计的飞行器几何模型,根据所述飞行器几何模型生成对应的飞行器网格文件;
4、根据所述飞行器几何模型,对所述飞行器网格文件中各网格节点进行类型标记,得到固定节点和优化节点,根据网格边两端的节点类型,得到待优化边;
5、最小化预先构建的所述待优化边坍缩到新节点的坍缩代价,得到所述待优化边的坍缩代价和坍缩后的新节点,将所述待优化边的坍缩代价存储在堆数据结构;所述堆数据结构的堆顶边是坍缩代价最小的待优化边;
6、若所述堆顶边坍缩后相邻网格单元的平均质量不小于坍缩前的平均质量,以及坍缩后不会引起局部相交,则将所述堆顶边进行坍缩,根据坍缩后生成的新网格单元更新所述堆数据结构,迭代取出堆顶边并进行坍缩判断,直到当前最差单元质量不小于预设的最差质量阈值时,停止迭代,得到优化后的飞行器网格文件;
7、利用cfd 数值仿真软件对所述优化后的飞行器网格文件进行计算,得到飞行器的多个性能指标;所述性能指标包括飞行器升力系数和飞行器阻力系数;
8、根据预先设置的飞行器设计要求对所述飞行器的多个性能指标进行评估,若性能指标达到设计要求则输出设计方案。
9、在其中一个实施例中,还包括:根据所述待优化边两端的节点的q矩阵计算得到待优化边的q矩阵;根据所述待优化边的q矩阵、待优化边的长度以及新节点的位置坐标,得到所述待优化边坍缩到所述新节点的坍缩代价。
10、在其中一个实施例中,还包括:所述待优化边坍缩到所述新节点的坍缩代价为:
11、;
12、其中,为待优化边坍缩到新节点的坍缩代价,为新节点的扩展坐标,为新节点的三维坐标,为待优化边的长度,为节点的q矩阵,为节点的q矩阵。
13、在其中一个实施例中,还包括:所述节点的q矩阵为:
14、;
15、其中,为节点的q矩阵,为与节点相连的所有网格面对应的平面集合,表示三维空间中的平面,,。
16、在其中一个实施例中,还包括:根据所述飞行器几何模型,得到所述飞行器网格文件中各网格单元的网格单元状态;所述网格单元状态包括冻结状态、优化状态和默认状态;将冻结状态网格单元的节点标记为固定节点,将优化状态网格单元中未标记为固定节点的节点标记为优化节点;遍历每一网格边,若当前网格边两端的两个节点都是优化节点或者一个是优化节点另一个不是固定节点,则当前网格边为待优化边,将待优化边加入待优化列表。
17、在其中一个实施例中,还包括:根据网格单元类型的横纵比计算所述飞行器网格文件中各网格单元的单元质量;所述网格单元类型包括三角形、四边形和四面体;根据所述堆顶边坍缩后相邻网格单元的单元质量,得到所述堆顶边坍缩后相邻网格单元的平均质量。
18、在其中一个实施例中,还包括:计算所述新网格单元的质量并更新当前最差单元质量;将新节点标记为优化节点,计算新边的坍缩代价以及新节点位置,对应更新堆数据结构。
19、在其中一个实施例中,还包括:若所述堆顶边坍缩后相邻网格单元的平均质量小于坍缩前的平均质量,以及坍缩后会引起局部相交,则删除堆顶边,并更新堆数据结构。
20、在其中一个实施例中,还包括:若性能指标未达到设计要求则由设计人员对飞行器的几何形状重新进行模型调整并进行性能指标评估,直至性能指标达到设计要求输出设计方案。
21、一种基于边坍缩网格优化的飞行器仿真驱动设计装置,所述装置包括:
22、网格文件生成模块,用于获取预先设计的飞行器几何模型,根据所述飞行器几何模型生成对应的飞行器网格文件;
23、待优化边获取模块,用于根据所述飞行器几何模型,对所述飞行器网格文件中各网格节点进行类型标记,得到固定节点和优化节点,根据网格边两端的节点类型,得到待优化边;
24、数据结构生成模块,用于最小化预先构建的所述待优化边坍缩到新节点的坍缩代价,得到所述待优化边的坍缩代价和坍缩后的新节点,将所述待优化边的坍缩代价存储在堆数据结构;所述堆数据结构的堆顶边是坍缩代价最小的待优化边;
25、网格优化模块,用于若所述堆顶边坍缩后相邻网格单元的平均质量不小于坍缩前的平均质量,以及坍缩后不会引起局部相交,则将所述堆顶边进行坍缩,更新所述堆数据结构,迭代取出堆顶边并进行坍缩判断,直到当前最差单元质量不小于预设的最差质量阈值时,停止迭代,得到优化后的飞行器网格文件;
26、数值仿真模块,用于利用cfd 数值仿真软件对所述优化后的飞行器网格文件进行计算,得到飞行器的多个性能指标;所述性能指标包括飞行器升力系数和飞行器阻力系数;
27、结果输出模块,用于根据预先设置的飞行器设计要求对所述飞行器的多个性能指标进行评估,若性能指标达到设计要求则输出设计方案。
28、上述基于边坍缩网格优化的飞行器仿真驱动设计方法和装置,通过对飞行器几何外形进行设计,并根据设计好的飞行器几何模型生成飞行器网格文件,对包含多种单元类型的飞行器网格文件进行质量优化,并可根据需求固定和优化其中特定类型的单元,基于不同单元类型特性,对网格局部进行优化,能够针对性提高网格质量,针对大规模网格具有较低的时间开销,并在一定程度上保持了原有网格的拓扑结构。本发明实施例,能够加快cfd仿真的收敛过程并提高计算准确性,使得性能分析结果更可靠,并根据计算结果反馈设计方案的调整方向,形成全流程的飞行器仿真驱动设计方案。
- 还没有人留言评论。精彩留言会获得点赞!