一种基于注意力机制和编码解码GRU的船舶轨迹预测方法
本发明涉及轨迹预测,尤其涉及一种基于注意力机制和编码解码gru的船舶轨迹预测方法。
背景技术:
1、自动识别系统(ais)用于广播和接收基于船舶的信息。然而,由于ais广播的不确定性质和船舶航行路线的灵活性,ais数据往往包含大量有噪声的轨迹,这降低了预测轨迹的准确性。轨迹预测在海事领域非常重要,如路径规划、避碰和海上预警。例如,在避免碰撞中使用轨迹预测可以帮助船舶避免潜在的碰撞风险,防止不必要的事故,并在保障海上安全方面发挥着至关重要的作用。
2、目前,学者们主要依靠数学建模、基于聚类的方法、机器学习作为船舶轨迹预测的方法。数学建模在一系列假设和简化的基础上建立模型,可以解决部分噪声点导致的精度下降的问题,并且这个方法计算资源少,计算速度快,然而,如果需要指定诸如船舶的初始位置、速度和方向等难以捉摸的参数,这可能会限制模型的准确性。其次,聚类方法可以将独立的ais数据聚类成一条完整的轨迹,但是不能应用于灵活的航迹预测。此外,机器学习算法解决了噪声对预测结果的不利影响,从而提高了精度。然而由于海上航线的多变性和灵活性,有效地捕获船舶的位置、速度和方向等轨迹信息具有挑战性,因此,它可能会导致预测结果不那么精确。
3、目前现有的轨迹预测方法,已经做出了巨大的努力。然而,这些方法仍然有一些需要解决的缺陷和限制需要解决。有学者开发了一个将dbscan算法与lstm(长短期记忆)网络相结合的轨迹预测模型。其中,dbscan(基于密度的噪声应用空间聚类)算法用于数据预处理,而lstm网络用于训练目的。该模型已被证明可以提高轨迹预测的精度,但它可能不适用于复杂和灵活的轨迹。相反,学者提出了利用递归神经网络(rnn)的多层结构来预测轨迹结果。他们发现,lstm网络的表现优于其他网络,但它们有更高的计算复杂度。此外,对高度复杂的轨迹的预测结果精度较低。
技术实现思路
1、本发明提供了一种基于注意力机制和编码解码gru的船舶轨迹预测方法,旨在有效解决上述技术问题。
2、根据本发明的第一方面,本发明提供一种基于注意力机制和编码解码gru的船舶轨迹预测方法,所述方法包括:
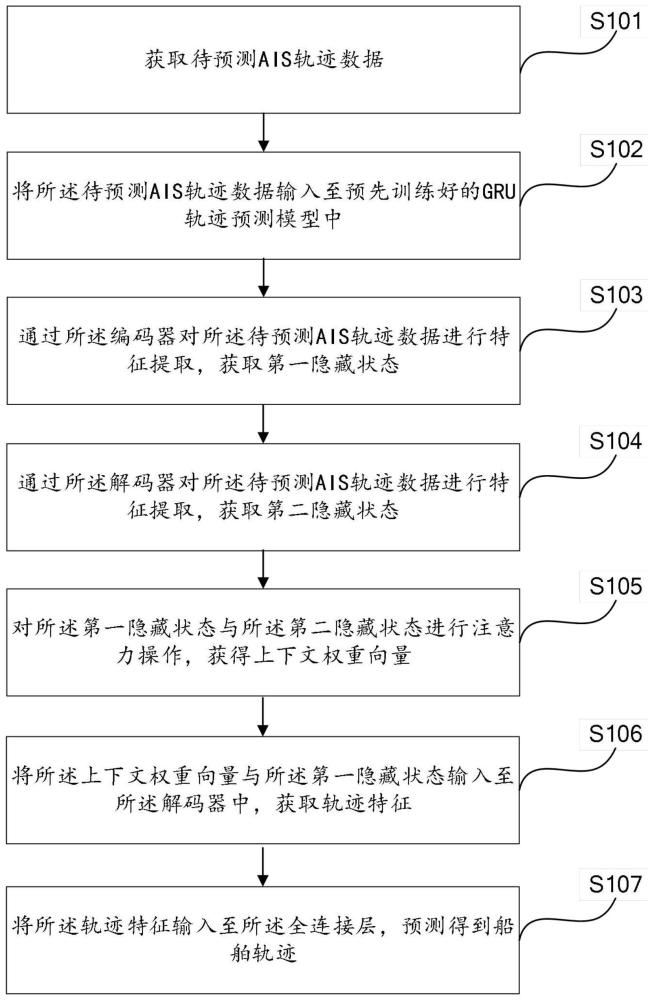
3、获取待预测ais轨迹数据;
4、将所述待预测ais轨迹数据输入至预先训练好的gru轨迹预测模型中,所述预先训练好的轨迹预测模型包括编码器、解码器与全连接层;
5、通过所述编码器对所述待预测ais轨迹数据进行特征提取,获取第一隐藏状态;
6、通过所述解码器对所述待预测ais轨迹数据进行特征提取,获取第二隐藏状态;
7、对所述第一隐藏状态与所述第二隐藏状态进行注意力操作,获得上下文权重向量;
8、将所述上下文权重向量与所述第一隐藏状态输入至所述解码器中,获取轨迹特征;
9、将所述轨迹特征输入至所述全连接层,预测得到船舶轨迹。
10、进一步地,所述编码器为基于gru的编码器,所述编码器包括更新门、复位门与输出门;
11、相应地,所述通过所述编码器对所述待预测ais轨迹数据进行特征提取,获取第一隐藏状态的步骤,包括:
12、利用所述更新门输入待预测ais轨迹数据和进行遗忘操作:
13、zt=sigmoid(wt*[ht-1,pt]+bz)
14、式中,wt与bz分别为更新门的权重和偏置,zt为更新门的输出,ht-1是t-1时刻的输出状态,pt是t时刻的状态;
15、利用所述复位门计算当前状态是否依赖于上一个时间步长中的状态值:
16、rt=sigmoid(wr*[ht-1,pt]+br)
17、式中,wr、br是复位门的权重和偏置,rt是复位门的输出;
18、激活函数ht’为:
19、ht’=tanh(wh*[rt*ht-1,pt]+bh)
20、式中,wh、bh是激活函数的权重和偏置,tanh为双曲正切函数;
21、基于所述更新门的输出zt、复位门的输出rt以及激活函数ht’获取输出门的输出ht:
22、ht=gru(pt,ht-1)=zt*ht-1+(1-zt)*ht’。
23、进一步地,所述对所述第一隐藏状态与所述第二隐藏状态进行注意力操作,获得上下文权重向量的步骤,包括:
24、根据所述第一隐藏状态与所述第二隐藏状态计算预测轨迹点和输入轨迹点之间的相关性:
25、f(hi,si)=tanh(w1*ht+w2*s)
26、式中,hi为第i个第一隐藏状态,si为第i个第二隐藏状态,w1为h的权重矩阵,w2为s的权重矩阵,ht={sl-0,sl-1,sl-2…,s0},其中l是轨迹的长度;
27、根据所述第一隐藏状态和所述第二隐藏状态计算得到注意力权重矩阵δ:
28、δ=[δ0,δ1,δ2...]t=[f(h0,s0),f(h1,s1),f(h2,s2),...]t
29、对所述注意力权重矩阵进行归一化处理,获得归一化矩阵αj:
30、
31、根据所述归一化矩阵以及所述第一隐藏状态获得上下文向量矩阵vi:
32、
33、式中,j是j的集合,表示从j=0到j=l的集合,l代表轨迹的长度。
34、进一步地,所述gru轨迹预测模型通过如下方式训练得到:
35、将历史ais轨迹数据中的训练集输入至预先构建的gru轨迹预测模型中,获取初步预测轨迹;
36、根据评价指标均方根误差来度量所述初步预测轨迹与实际样本值之间的距离误差;
37、根据预设的网络参数以及所述距离误差对所述gru轨迹预测模型进行训练更新,以获取训练好的gru轨迹预测模型。
38、进一步地,所述距离误差根据下式计算得到:
39、
40、其中,和分别为初步预测轨迹中的纬度和经度,lati和loni分别是纬度和经度的实际样本值,dist表示初步预测轨迹与实际样本值之间的距离。
41、进一步地,在所述将历史ais轨迹数据中的训练集输入至预先构建的gru轨迹预测模型中,获取初步预测轨迹的步骤之前,方法还包括:
42、对所述历史ais轨迹数据进行噪声数据过滤,以获取过滤后数据,所述噪声数据包括无效数据、重复数据、错误数据;
43、对所述过滤后数据进行标准化处理,获取标准数据;并将所述标准数据划分为测试集与训练集。
44、进一步地,所述无效数据为船舶异常行为的数据;所述重复数据为多条ais数据内容相同的数据;所述错误数据为经纬度超出正常范围、航向或者速度异常的数据。
45、根据本发明的第二方面,本发明还提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序以实现如上述的方法。
46、根据本发明的第三方面,本发明还提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述的方法。
47、根据本发明的第四方面,本发明还提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时,实现如上述的方法。
48、通过本发明中的上述实施例中的一个实施例或多个实施例,至少可以实现如下技术效果:将待预测ais轨迹数据输入至预先训练好的gru轨迹预测模型中;通过编码器对待预测ais轨迹数据进行特征提取,获取第一隐藏状态;通过解码器对待预测ais轨迹数据进行特征提取,获取第二隐藏状态;对第一隐藏状态与第二隐藏状态进行注意力操作,获得上下文权重向量;将上下文权重向量与第一隐藏状态输入至解码器中,获取轨迹特征;将轨迹特征输入至全连接层,预测得到船舶轨迹。本发明使用gru作为基础网络,减轻了梯度消失和爆炸的问题,减少了模型的训练时间,且使用注意力机制,使得模型关注对轨迹影响较大的历史轨迹,减少了噪声数据的影响,提高了轨迹预测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!