一种多模导引头信息融合目标状态估计方法
本发明属于飞行器制导控制领域,涉及一种多模导引头信息融合目标状态估计方法。
背景技术:
1、随着空空导弹对抗环境日趋复杂,单一制导模式已经不能满足战场需求,多模导引头能够对不同探测系统获得的最优估计信息进行融合,弥补单模导引头视线角速率提取精度不高、目标加速度估计误差较大等缺陷,实现导弹高精度制导降低导弹脱靶量。
2、滚仰半捷联导引头相比于传统俯仰偏航的平台导引头具有大视场范围,滚仰导引头由于取消了角速率陀螺,降低导弹头部体积和质量,因此具有更高机动能力,具有视场大、体积小、质量轻的优势。可实现滚转框和俯仰框相互配合可实现对目标跟踪,但是半捷联结构取消了角速率陀螺,因此滚仰导引头无法直接为导弹控制系统提供视线角速率信息,需要通过微分或滤波算法获取视线角速率以及目标运动状态估计结果。
3、目前对于目标高机动环境下的目标状态估计算法,主要针对低速运动目标,这些研究成果可以很好的估计目标机动加速度,但是针对空空导弹的目标状态估计算法,考虑到滚仰导引头的耦合框架特殊结构以及其半捷联特性,这些方法就不能直接推广使用了。对于多模导引头信息融合研究,大多数信息融合都是基于量测信息融合,并未将量测信息与多模型滤波模型结合,假如目标进行变加速机动时,通过量测量是无法实现对目标的精确跟踪。鉴于现在研究现状存在的问题,如何实现半捷联多模导引头对高机动目标运动状态精确估计和噪声环境下导弹制导信息提取精度成为目前亟待解决的问题。
技术实现思路
1、为解决上述背景技术中存在的问题,本发明的目的是提供一种多模导引头信息融合目标状态估计方法,通过多模导引头信息融合进行目标状态估计,应用于导弹末制导精确打击环节,提高导引头对大机动目标状态估计精度,降低空空导弹脱靶量。
2、本发明的目的是通过下述技术方案实现的:
3、本发明公开的一种多模导引头信息融合目标状态估计方法,包括如下步骤:
4、步骤1:采用重构法提取半捷联导引头视线角量测信息;
5、采用重构法重构视线角计算过程如式(1)所示:
6、
7、式中为惯性坐标系到弹体坐标系转换矩阵,为弹体坐标系到内框坐标系转换矩阵,为内框坐标系到体视线坐标系转换矩阵,为惯性坐标系到视线坐标系转换矩阵。
8、
9、
10、
11、
12、转换矩阵中,εp为探测器俯仰误差角、εy为探测器偏航误差角,φp为导引头俯仰框架角、φr为导引头滚转框架角,θ为弹体俯仰角、ψ为弹体偏航角、γ为弹体滚转角,qp为俯仰视线角,qy为偏航视线角,等式(1)右边坐标变换得到的坐标为[xq yq zq]t,即
13、
14、由等式右边计算得到的坐标为:
15、
16、上面两个等式的右边相等,从而得到
17、
18、获得的俯仰视线角和偏航视线角用于步骤2中交互多模型滤波模型中雷达探测系统量测量和红外探测系统量测量分别为雷达探测系统俯仰和偏航视线角量测量,分别为红外探测系统俯仰和偏航视线角量测量。
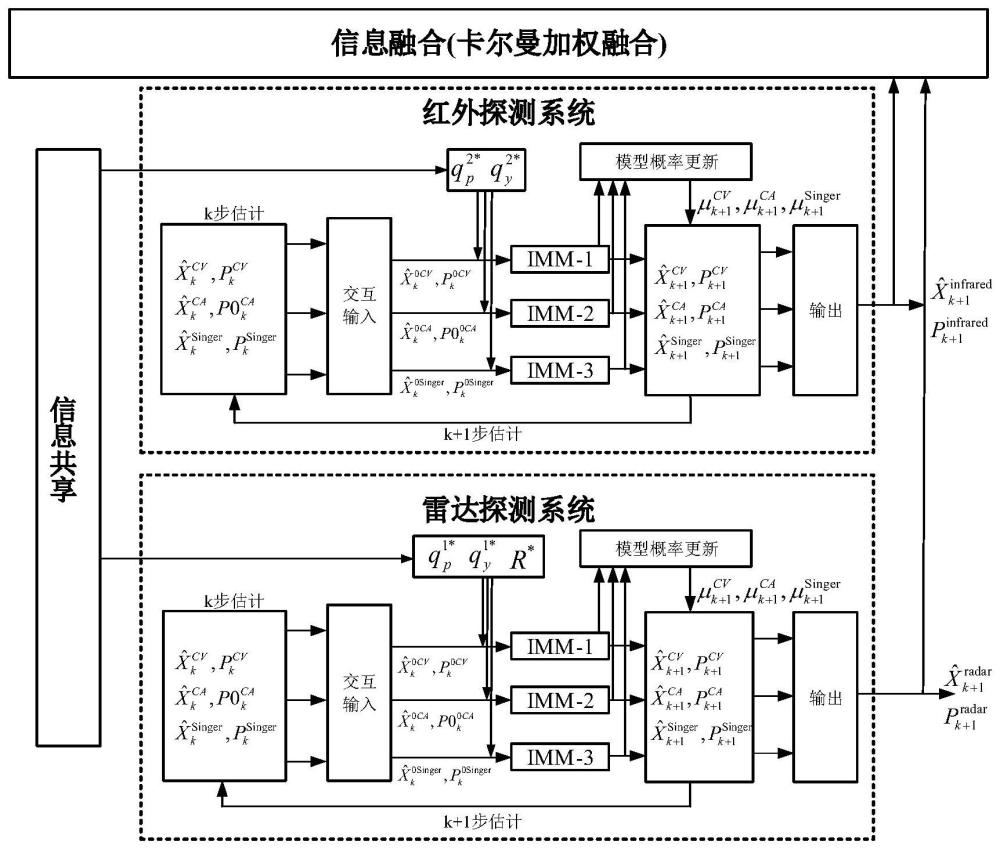
19、步骤2:基于预先装订目标典型的机动模型和步骤3融合信息反馈的先验估计,采用模型概率转移方法估计出目标机动类型,并构建交互式多模滤波算法的多模型滤波器模型;基于多模型滤波器获得导引头中的雷达探测器和红外探测器的最优估计状态和协方差。所述多模型滤波器模型对机动模型变化的目标具有更好的状态估计效果。
20、多模型滤波算法的滤波模型如下:
21、输入交互为:
22、
23、
24、
25、式(5)-(7)中,为交互后目标状态量矩阵,为协方差矩阵,zk为量测量矩阵。i=1,...,r表示目标机动模型的个数,为第i个机动模型在k-1时刻的估计值,为模型概率,pij为转移概率,为归一化常数,有进行卡尔曼并行滤波:
26、状态预测:
27、
28、为先验估计结果,为状态转移矩阵;
29、协方差矩阵预测:
30、
31、为协方差预测估计结果,为系统噪声矩阵;
32、卡尔曼增益:
33、
34、为卡尔曼增益,hk为量测矩阵,rk为量测噪声矩阵;
35、滤波状态更新:
36、
37、为k时刻最优估计结果,zk为真实量测值滤。
38、滤波协方差阵更新:
39、
40、模型概率更新;
41、
42、式(13)中,c为归一化常数,且量测量zk的似然函数,有:
43、
44、式(14)中,
45、输出交互:
46、
47、
48、式(15)、(16)中,为多模型滤波算法状态更新矩阵,pk,k为协方差更新矩阵;
49、其中,目标在cv、ca、singer三种机动模型下的离散化的状态转移矩阵以及三种机动模型下基于功率谱形式的离散化系统噪声矩阵计算过程如下:
50、目标在cv、ca、singer机动模型下的状态量为其中x,y,z为惯性空间中导弹与目标三个方向相对位置,为三个方向相对速度,ax,ay,az为三个方向相对加速度,导弹状态视为已知,得到连续运动模型为:
51、
52、式(17)中,a为连续系统状态阵,g为连续系统噪声阵,w=(wx,wy,wz)t,其分量wx,wy,wz皆是均值为零,方差为的高斯白噪声,三个方向噪声具有相同的统计特性,记为:sw为系统功率谱密度,且噪声之间互不相关,即e(wxwy)=0、e(wxwz)=0、e(wywz)=0;
53、当目标作匀速直线运动时为cv模型,目标加速度为随机扰动(系统噪声),目标加速度的变化为零,则有:
54、
55、其中,i3为三阶单位矩阵,03为三阶零矩阵;将cv模型连续运动模型离散化,得到:
56、
57、其中,为状态转移矩阵,为离散系统噪声阵,经计算因此状态转移矩阵近似为三阶泰勒级数展开,为:
58、
59、离散步长为ts,离散化的状态转移矩阵为:
60、
61、对gcv阵离散,有:
62、
63、得:
64、
65、则系统噪声离散阵
66、
67、当目标作匀加速直线运动符合ca模型,加速度变化为随机扰动,设置同样状态量及连续运动模型,同样得到ca模型下连续系统状态阵和连续系统噪声阵:
68、
69、将ca模型连续运动模型离散化,计算得到ca模型离散化的状态转移矩阵:
70、
71、系统噪声离散阵为:
72、
73、当目标加速度a(t)是均值为零的一阶时间相关模型,且符合稳态马尔科夫过程,为singer模型,加速度的时间相关函数ra(t)为:
74、ra(t)=e[a(t)a(t+τ)]=σt2e-α|τ| (26)
75、其中,是时间相关的加速度方差,τ为机动时间间隔,α为机动频率,即机动时间间隔的倒数,目标作转弯机动时,取α=1/60;目标作逃逸机动时,取α=1/20;对时间自相关函数作白化处理:
76、
77、式(27)中,设置状态量及连续运动模型,得到singer模型下连续系统状态阵和连续系统噪声阵:
78、
79、将singer模型连续运动模型离散化,计算得到singer模型离散化的状态转移矩阵:
80、
81、以及系统噪声离散阵
82、
83、其中:
84、
85、
86、
87、对于雷达和红外探测器模型的量测方程h1(x)、h2(x)进行线性化处理过程如下:
88、量测量为:
89、
90、式(30)中,是雷达、红外导引头角度相关的量测噪声,vr是与距离相关的量测噪声,经离散化后的角度量测噪声的方差大小为离散化后距离量测噪声的方差大小为r*分别为含有噪声的雷达红外导引头俯仰视线角、偏航视线角以及弹目距离,qp、qy、r分别为真实的俯仰视线角、偏航视线角以及弹目距离。
91、弹目相对几何关系如下:
92、
93、量测方程为非线性方程,需要对其进行线性化处理,由式(31)得线性化的雷达、红外导引头量测方程为:
94、
95、式(32)中:
96、
97、其中:
98、
99、
100、
101、对量测噪声进行离散,得:
102、
103、步骤3:将步骤2中获得的两种探测器的最优估计状态最优估计和协方差作为信息融合输入,以雷达和红外探测器协方差矩阵为权重,通过卡尔曼加权融合算法对雷达导引头和红外导引头的目标状态估计结果求加权平均数得到目标状态全局最优估计值,再将融合信息反馈至步骤2中的多模型滤波器中作为先验估计。
104、为雷达探测系统对目标状态信息的估计,而为红外探测系统对目标状态信息的估计,的估计误差协方差矩阵为pi,的估计误差协方差矩阵为pi′;
105、关于目标状态信息的估计误差协方差矩阵之间是相互独立的,则雷达和红外探测器两种探测系统i和i′所获得的目标状态信息的卡尔曼加权融合估计值为:
106、
107、融合估计的协方差mii′为:
108、mii′=pi-pi(pi+pi′)-1pi=pi(pi+pi′)-1pi′ (36)
109、步骤4:迭代步骤2至步骤3进行多模导引头信息融合目标状态估计,得到目标状态全局最优估计值,实现对雷达和红外滤波信息加权融合目标状态估计。
110、还包括步骤5:将步骤4得到的目标状态全局最优估计值应用于导弹末制导精确打击环节,提高导引头对大机动目标状态估计精度,降低空空导弹脱靶量。
111、有益效果:
112、1、本发明公开的一种多模导引头信息融合目标状态估计方法,充分考虑到半捷联导引头结构特性,利用导弹可获取的弹体、框架角、探测器误差角信息,采用视线角重构方法得到俯仰和偏航视线角,相较于光轴视线角直接微分,能够减少噪声的情况下信息微分处理的数量,提高弹载计算机的数据处理速度。
113、2、本发明公开的一种多模导引头信息融合目标状态估计方法,针对空中目标的典型机动模型,其中包括cv、ca和singer机动模型。选择与其相适应的跟踪模型作为模型集,设计单模导引头imm滤波器,采用模型概率转移以此逼近目标真实运动状态,对大机动目标具有更好的跟踪效果。
114、3、本发明公开的一种多模导引头信息融合目标状态估计方法,以雷达和红外探测器协方差矩阵为权重,通过卡尔曼加权融合方法对雷达导引头和红外导引头的目标状态估计结果求加权平均数得到目标状态全局最优估计值,信息融合后状态估计误差的均方根误差更小,对目标加速度、估计更为稳定,视线角速率提取精度高,其整体性能优于单模导引头,提高导弹对高机动目标的打击精度。
- 还没有人留言评论。精彩留言会获得点赞!