一种在轨自感知全链条数据处理方法及硬件平台
本发明涉及数据处理,尤其涉及一种在轨自感知全链条数据处理方法及硬件平台。
背景技术:
1、天基大视场光学探测系统在空间碎片探测领域发挥着至关重要的作用,但此类系统普遍存在体积大、功耗高的问题,并且无法实现在轨的多目标自主识别与态势信息生成。近年来,随着微纳技术的不断发展,新兴的超构透镜具有质量轻、易集成、探测视场大等显著优势,使得灵巧的小型化天基大视场空间目标探测系统有了工程实现的可行性。未来,小型化天基大视场空间目标探测系统能够十分容易的寄宿于星载平台,可利用星载平台实现空间碎片探测。
2、当前,大视场空间目标探测系统普遍采用星地协同数据处理模式,即星上数据处理平台负责对图像进行预处理,生成低级数据产品,如质心位置与灰度、图像曝光信息等,而后经由星地通信链路将低级数据产品下传至地面,地面数据处理系统完成后续的天文定位、光度测量以及更进一步的信息生成。由于星地通信资源有限,容易出现星上囤积大量数据无法下传至地面的情况,此问题随着卫星与载荷数量的上升将愈发严重;此外,受地面站的地理分布因素影响,卫星运行于地面站无法覆盖的区域时,无法实现全链条数据处理,直接影响了态势感知信息生成的时效性。
3、参考申请号为“cn202211196712.6”公开了一种星载图像多路并行数据采集处理与传输系统,具体内容包括:所述系统包括5路tlk2711数据采集接口、主控fpga芯片、2路gtx高速串行serdes接口和can总线接口,所述5路tlk2711数据采集接口与5路光学ccd相机连接,将数据传递至主控fpga芯片,所述数据在主控fpga芯片中处理后通过2路gtx高速串行serdes接口传输至数据存储系统,所述主控fpga芯片通过can总线接口与中心机连接。
4、此现有技术能够实现对前端多路相机数据的高效稳定实时采集,但不具备面向高级编程语言的开发环境,无法实现全链条在轨自感知数据处理,且不能满足即时态势信息生成的需求,无法适应未来大规模部署小型化大视场空间目标探测系统的技术趋势;因此本技术提出了一种在轨自感知全链条数据处理方法及硬件平台,能够有效节省对卫星平台的空间与功耗占用,在功能、性能与结构上能够适应寄宿式大视场空间目标探测系统对数据处理硬件平台的需求。
技术实现思路
1、本技术的目的是提供一种在轨自感知全链条数据处理方法及硬件平台,旨在解决上述问题。
2、为实现上述目的,本技术提供如下技术方案:
3、本技术提供一种在轨自感知全链条数据处理方法,包括下述步骤:
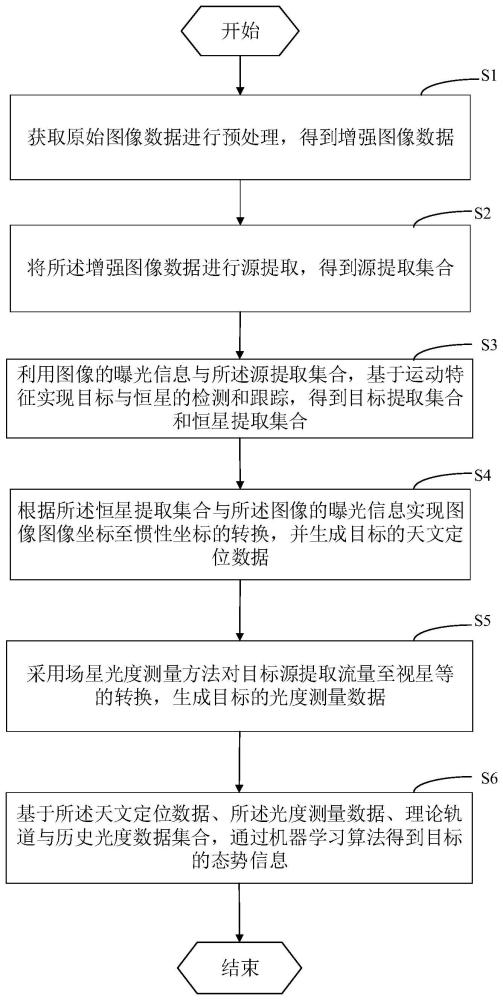
4、获取原始图像数据进行预处理,得到增强图像数据;
5、将所述增强图像数据进行源提取,得到源提取集合;
6、利用图像的曝光信息与所述源提取集合,基于运动特征实现目标与恒星的检测和跟踪,得到目标提取集合和恒星提取集合;
7、根据所述恒星提取集合与所述图像的曝光信息实现图像坐标至惯性坐标的转换,并生成目标的天文定位数据;
8、采用场星光度测量方法对目标源提取流量至视星等的转换,生成目标的光度测量数据;
9、基于所述天文定位数据、所述光度测量数据、理论轨道与历史光度数据集合,通过机器学习算法得到目标的态势信息。
10、进一步的,在获取原始图像数据进行预处理,得到增强图像数据的步骤中,具体包括下述步骤:
11、对天基大视场空间目标探测系统拍摄的图像进行滤波、背景均匀性增强、对比度增强、亮度增强、坏点剔除、平场与本底场校正的处理。
12、进一步的,在将所述增强图像数据进行源提取,得到源提取集合的步骤中,具体包括下述步骤:
13、所述源提取集合包括所述增强图像数据中所有可探测恒星、空间目标及无法剔除的噪声的质心位置、分布范围、灰度统计信息、椭圆度以及半高全宽。
14、进一步的,在基于所述天文定位数据、所述光度测量数据、理论轨道与历史光度数据集合通过机器学习算法得到目标的态势信息的步骤中,具体包括下述步骤:
15、基于目标即时实测角距与理论角距进行唯一性匹配,生成目标异动信息;
16、通过所述历史光度数据集合提取目标光变曲线特征;
17、基于所述历史光度数据集合对所述目标异动信息进行分类,匹配空域的目标光变曲线特征,识别异动目标。
18、进一步的,在基于目标即时实测角距与理论角距进行唯一性匹配,生成目标异动信息的步骤中,具体包括下述步骤:
19、利用多目标位置间的几何关系,采用基于三角形匹配的目标异动初步判定方法;由3个目标构成的观测三角形与其理论位置构成的三角形进行唯一性匹配,基于角距误差的多目标角距匹配模型:
20、α1,3=α′1,3+δα,
21、l1,2=l′1,2+δl,
22、l2,3=l′2,3+δl,
23、若多目标角距关系满足匹配模型,则判定目标无异动;若角距不匹配,则根据已识别目标未出现、未识别目标已出现以及已识别目标位置改变的三种情况,在目标的所述历史光度数据集合中对异常目标进行光度特征指纹匹配。
24、进一步的,在通过所述历史光度数据集合提取目标光变曲线特征的步骤中,具体包括下述步骤:
25、将目标的所述历史光度数据采用固定时间间隔进行采样整理,生成光变曲线矩阵:
26、
27、采用pca主成分分析算法进行处理,包括下述步骤:
28、将光变曲线矩阵w中心化,即每一位特征减去各自的均值;
29、计算协方差矩阵
30、用特征值分解方法求协方差矩阵的特征值与特征向量;
31、对特征值按照从大到小排序,选取其中最大的k个,将对应的k个特征向量分别作为行向量组成特征向量矩阵p;
32、将数据转换到k个特征向量构建的新空间中,即y=px。
33、进一步的,在基于所述历史光度数据集合对所述目标异动信息进行分类,匹配空域的目标光变曲线特征,识别异动目标的步骤中,具体包括下述步骤:
34、采用支持向量机svm分类器对所述目标异动信息进行分类,svm经过所述目标的历史光度数据集合训练。
35、本技术提供一种在轨自感知全链条数据处理硬件平台,包括:
36、图像采集模块:获取原始图像数据;
37、通信模块1:用于接收曝光与望远镜指向锁存模块发送的图像曝光中心时刻以及该时刻下的望远镜指向位置,生成图像的曝光信息;
38、通信模块2:用于接收地面上载的目标理论轨道与历史光度数据集合;
39、linux操作系统:用于对原始图像数据预处理得到增强图像数据;将增强图像数据进行源提取,得到源提取集合;利用图像的曝光信息与所述源提取集合,基于运动特征实现目标与恒星的检测和跟踪,得到目标提取集合和恒星提取集合;根据所述恒星提取集合与所述图像的曝光信息实现图像坐标至惯性坐标的转换,并生成天文定位数据;采用场星光度测量方法对所述恒星提取集合进行流量至视星等的转换,生成目标的光度测量数据;基于天文定位数据、所述光度测量数据、所述理论轨道与所述历史光度数据集合,通过机器学习算法得到目标的态势信息。
40、本技术提供一种设备,所述设备包括处理器、与所述处理器耦接的存储器,其中,所述存储器存储有用于实现一种在轨自感知全链条数据处理方法的程序指令;所述处理器用于执行所述存储器存储的所述程序指令以实现在轨自感知全链条数据处理。
41、本技术提供一种存储介质,存储有处理器可运行的程序指令,所述程序指令用于执行一种在轨自感知全链条数据处理方法。
42、本技术提供了一种在轨自感知全链条数据处理方法及硬件平台,具有以下
43、有益效果:
44、(1)本技术将目标检测、天文定位、光度测量以及态势信息生成等数据处理环节移植到星上数据处理平台进行处理;卫星平台周期性接收地面中心上载的目标理论轨道与历史光度数据集合,采用基于即时角距匹配结合光度特征指纹的目标态势信息生成方法,即可实现态势信息的自动生成,即自主完成全链条数据处理流程;目标识别与态势信息生成无需依赖地面站,极大提升了态势感知时效性,降低了星地通信压力,为未来大规模部署小型化的天基大视场空间目标探测系统提供可行性;
45、(2)本技术提出星上嵌入式数据处理平台搭载arm架构cpu,预装linux操作系统,嵌入gpu处理单元与前端数据采集单元,支持python等高级编程语言开发,能够执行全链条自感知数据采集与处理流程。
- 还没有人留言评论。精彩留言会获得点赞!