一种轨道列车自主定位方法、系统、设备及介质与流程
本发明涉及轨道交通,特别是涉及一种轨道列车自主定位方法、系统、设备及介质。
背景技术:
1、轨道交通具有安全高效、节能环保、运量大、准时舒适等独特优势,已成为大多数居民的首选出行方式。列车定位技术在轨道交通列车运行控制系统中发挥着重要作用,它是保障高速列车安全高效运行的关键技术,其定位结果直接关系到列车的行驶安全,影响着轨道交通的运行效率。
2、传统的列车定位方法主要依靠轨道电路、计轴器、轮轴速度传感器以及铺设应答器辅助的方式等,虽然这些方法技术成熟,并具有较高的定位精度,但需要铺设大量的地面设备,存在建设维护成本高、故障恢复慢等问题。目前,基于轮轴速度传感器的轮轴测速测距搭配应答器校正为铁路应用较成熟的列车定位方法。轮轴速度传感器的测速测距方法主要是基于车轮转速的测量,一旦发生空转滑行,其定位精度就得不到保证;车轮磨损也会导致测速测距误差的线性累积,这种定位误差称为累计误差。此外,基于轮轴速度传感器的测速测距系统容易受到干扰,在通过道岔、低速或者环境干扰(例如雨水、水坑或荧光灯等)等情况下,可能导致测量出的列车速度等数据不准确,进而导致列车定位不准。
3、虽然基于轮轴速度传感器的测速测距方法的累计误差和定位不准问题可以通过地面应答器校正,但是如果想要实现列车在铁路全线的高精度定位,则需要铺设巨量的地面应答器,显然是不可行的。
4、因此,如何实现全线的轮轴测速测距方法累计误差的校正,满足列车自主定位的应用需求,至关重要。
技术实现思路
1、本发明的目的是提供一种轨道列车自主定位方法、系统、设备及介质,能够校正累计误差,实现轨道列车的高精度自主定位。
2、为实现上述目的,本发明提供了如下方案:
3、一种轨道列车自主定位方法,所述方法包括:
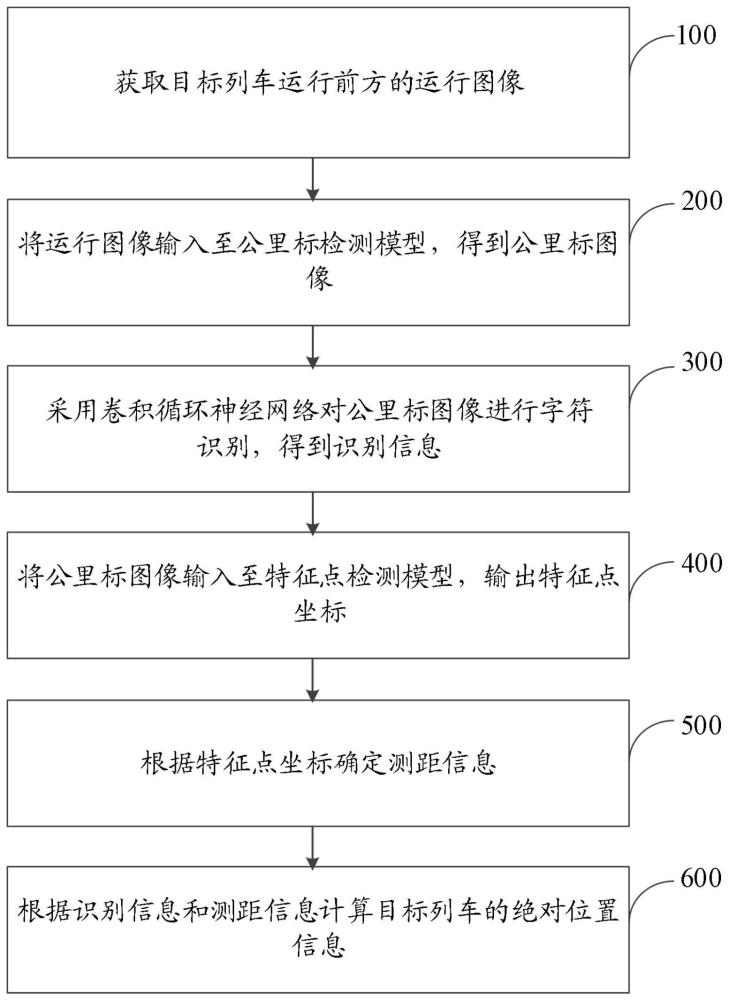
4、获取目标列车运行前方的运行图像;
5、将所述运行图像输入至公里标检测模型,得到公里标图像;所述公里标检测模型是采用深度学习的目标检测算法构建的;
6、采用卷积循环神经网络对所述公里标图像进行字符识别,得到识别信息;所述识别信息包括:公里标的内容;所述公里标表征目标列车运行线路的位置特征;
7、将所述公里标图像输入至特征点检测模型,输出特征点坐标;所述特征点检测模型也是采用深度学习的目标检测算法构建的;
8、根据所述特征点坐标确定测距信息;所述测距信息为所述目标列车的车头在运行方向上距公里标所在平面的纵向距离;
9、根据所述识别信息和所述测距信息计算所述目标列车的绝对位置信息。
10、可选地,所述公里标检测模型的确定方法为:
11、获取训练数据;所述训练数据包括:各个训练列车的运行图像和标签数据;所述标签数据包括:运行图像的公里标图像;
12、对所述训练数据进行预选框划分,得到训练划分数据;
13、对所述训练划分数据进行裁切分割,得到训练分割数据;
14、将所述训练分割数据划分为训练集和测试集;
15、构建深度学习网络;
16、将所述训练集和对应的标签数据输入至所述深度学习网络中,以误差最小为目标对所述深度学习网络中的识别参数进行训练,得到训练后的深度学习网络;所述识别参数包括:置信度;
17、采用所述测试集和对应的标签数据对训练后的深度学习网络的识别参数进行调整,得到所述公里标检测模型。
18、可选地,采用卷积循环神经网络对所述公里标图像进行字符识别,得到识别信息,具体包括:
19、对所述公里标图像进行区域检测,若所述公里标图像中的公里标处于设定区域,则将对应的公里标图像输出,作为初始的识别信息;
20、对初始的识别信息进行灰度化处理,得到处理的识别信息;
21、判断处理的识别信息是否符合设定的语义条件,得到判断结果;
22、若所述判断结果为是,则输出正确识别信息指令;
23、基于卷积循环神经网络,根据所述正确识别信息指令对所述公里标图像进行特征提取,得到公里标特征图像;
24、采用卷积循环神经网络设定的激活函数,对所述公里标特征图像进行映射,得到识别信息。
25、可选地,所述特征点检测模型的确定方法为:
26、获取训练数据;所述训练数据包括:各个训练列车的公里标图像和对应的标签数据;所述标签数据包括:运行图像的特征点坐标;
27、将所述训练数据划分为训练集和测试集;
28、构建深度学习神经网络;
29、将所述训练集和对应的标签数据输入至所述深度学习神经网络中,以误差最小为目标对所述深度学习神经网络中的参数进行训练,得到训练后的深度学习神经网络;
30、采用所述测试集和对应的标签数据对训练后的深度学习神经网络的参数进行调整,得到所述特征点检测模型。
31、可选地,根据所述特征点坐标确定测距信息,具体包括:
32、根据所述特征点坐标确定成像长度;
33、采用小孔成像中的三角相似原理根据所述成像长度确定测距信息。
34、可选地,所述绝对位置信息的计算公式为:
35、s(t)=n(t)*1000-x(t);
36、其中,s(t)为绝对位置信息;n(t)为识别信息;x(t)为测距信息;t为时刻。
37、一种轨道列车自主定位系统,所述系统包括:
38、图像获取模块,用于获取目标列车运行前方的运行图像;
39、公里标检测模块,用于将所述运行图像输入至公里标检测模型,得到公里标图像;所述公里标检测模型是采用深度学习的目标检测算法构建的;
40、识别模块,用于采用卷积循环神经网络对所述公里标图像进行字符识别,得到识别信息;所述识别信息包括:公里标的内容;所述公里标表征目标列车运行线路的位置特征;
41、特征点检测模块,用于将所述公里标图像输入至特征点检测模型,输出特征点坐标;所述特征点检测模型也是采用深度学习的目标检测算法构建的;
42、测距模块,用于根据所述特征点坐标确定测距信息;所述测距信息为所述目标列车的车头在运行方向上距公里标所在平面的纵向距离;
43、计算模块,用于根据所述识别信息和所述测距信息计算所述目标列车的绝对位置信息。
44、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述所述的轨道列车自主定位方法。
45、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的轨道列车自主定位方法。
46、根据本发明提供的具体实施例,本发明公开了以下技术效果:
47、本发明提供了一种轨道列车自主定位方法、系统、设备及介质,通过将获取的目标列车运行前方的运行图像,输入至采用深度学习的目标检测算法构建的公里标检测模型,得到公里标图像;采用卷积循环神经网络对公里标图像进行字符识别,得到识别信息;将公里标图像输入至采用深度学习的目标检测算法构建的特征点检测模型,输出特征点坐标;然后根据特征点坐标确定测距信息,进而根据识别信息和测距信息计算目标列车的绝对位置信息;该绝对位置信息能够校正累计误差。此外,由于采用深度学习的目标检测算法,能够具有更高的准确率、更快的检测速度以及更好的环境适应性,使得能够实现轨道列车的高精度自主定位。
- 还没有人留言评论。精彩留言会获得点赞!