一种配件分类转运方法、系统及装置与流程
本发明涉及配件运输,特别涉及一种配件分类转运方法、系统及装置。
背景技术:
1、挖掘机又称挖掘机械(excavating machinery),又称挖土机,是用铲斗挖掘高于或低于承机面的物料,并装入运输车辆或卸至堆料场的土方机械。
2、挖掘机挖掘的物料主要是土壤、煤、泥沙以及经过预松后的土壤和岩石。从近几年工程机械的发展来看,挖掘机的发展相对较快,挖掘机已经成为工程建设中最主要的工程机械之一。挖掘机在生产制造的过程中,挖掘机是由若干个生产出的零部件组装而成,零部件包括大件、中件、小件以及标准件。
3、现有技术当中,在对挖掘机进行组装时,需要对零部件进行运输,由于零部件分为大件、中件、小件以及标准件,因此需要对零部件进行分类运输,而在分类过程中,通常是通过人工判断,然后操控机械臂对零部件进行分类,而人工判断有时会出现判断错误,并且通过人工操控机械臂,不仅提升工作人员的工作量,还会降低工作效率。
技术实现思路
1、基于此,本发明的目的是提供一种配件分类转运方法、系统及装置,以至少解决上述现有技术当中的不足。
2、本发明提供一种配件分类运输方法,所述方法包括:
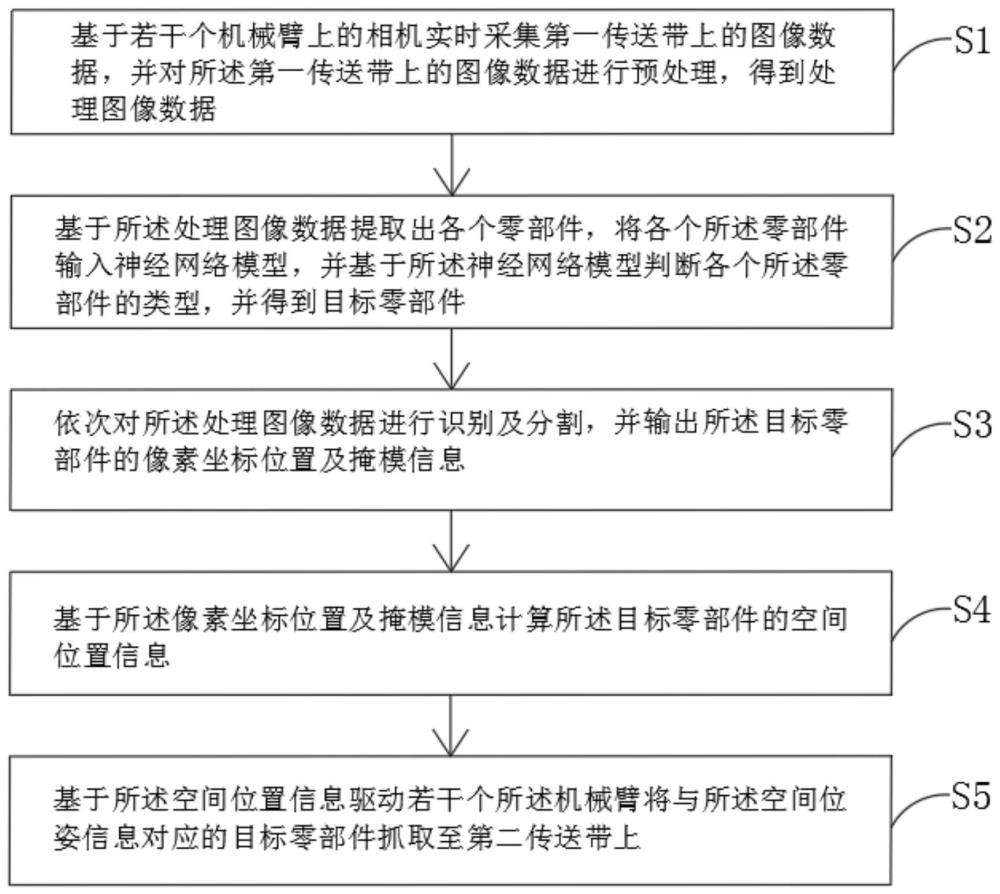
3、基于若干个机械臂上的相机实时采集第一传送带上的图像数据,并对所述第一传送带上的图像数据进行预处理,得到处理图像数据;
4、基于所述处理图像数据提取出各个零部件,将各个所述零部件输入神经网络模型,并基于所述神经网络模型判断各个所述零部件的类型,并得到目标零部件;
5、依次对所述处理图像数据进行识别及分割,并输出所述目标零部件的像素坐标位置及掩模信息;
6、基于所述像素坐标位置及掩模信息计算所述目标零部件的空间位置信息;
7、基于所述空间位置信息驱动若干个所述机械臂将与所述空间位姿信息对应的目标零部件抓取至第二传送带上。
8、与现有技术相比,本发明的有益效果是,通过神经网络模型判断处理图像数据中的各个零部件的类型,以能够准确的判断出各个零部件的类型,提升分类效率,然后通过识别分割得到目标零部件的像素坐标位置和掩模信息,并计算出其空间位置信息,然后基于机械臂对目标零部件进行抓取及转运,从而能够对指定的零部件进行抓取和转运,提升转运效率。
9、进一步的,所述并对所述第一传送带上的图像数据进行预处理的步骤包括:
10、将所述图像数据转换成rgb图及深度图;
11、对所述rgb图及所述深度图进行预处理,得到处理rgb图以及处理深度图。
12、进一步的,所述将各个所述零部件送入神经网络模型,并基于所述神经网络模型判断各个所述零部件的类型的步骤包括:
13、建立神经网络模型,基于提取出的各个所述零部件对所述神经网络模型进行训练,得到训练神经网络模型;
14、基于所述训练神经网络模型判断所述各个所述零部件的类型。
15、进一步的,所述依次对所述处理图像数据进行识别及分割,并输出目标零部件的像素坐标位置及掩模信息的步骤包括:
16、提取所述处理图像数据中的特征信息,并基于卷积采样将所述特征信息生成对应的特征向量;
17、基于所述特征向量计算所述目标零部件的像素坐标位置以及掩模信息。
18、进一步的,所述基于所述空间位置信息驱动若干所述机械臂将与所述空间位姿信息对应的目标零部件抓取至第二传送带上的步骤包括:
19、对所述机械臂及所述机械臂上的所述相机进行手眼标定,以得到所述机械臂与所述相机的空间关系;
20、基于所述空间关系及所述空间位置信息驱动所述机械臂,以使所述机械臂将对应的目标零部件抓取至第二传送带上。
21、本发明还提供一种配件分类转运系统,所述系统包括:
22、采集模块,用于基于若干个机械臂上的相机实时采集第一传送带上的图像数据,并对所述第一传送带上的图像数据进行预处理,得到处理图像数据;
23、判断模块,用于基于所述处理图像数据提取出各个零部件,将各个所述零部件输入神经网络模型,并基于所述神经网络模型判断各个所述零部件的类型,并得到目标零部件;
24、识别分割模块,用于依次对所述处理图像数据进行识别及分割,并输出所述目标零部件的像素坐标位置及掩模信息;
25、计算模块,用于基于所述像素坐标位置及掩模信息计算所述目标零部件的空间位置信息;
26、抓取模块,用于基于所述空间位置信息驱动若干个所述机械臂将与所述空间位姿信息对应的目标零部件抓取至第二传送带上。
27、本发明还提供一种配件分类转运装置,应用于上述的配件分类转运系统上,包括:
28、支撑机构;
29、若干机械臂,等距的设于所述支撑机构的顶部,若干所述机械臂上均设有相机;
30、用于转运零部件的第一传送机构以及第二传送机构,对称设于所述支撑机构的两侧;
31、其中,所述相机用于自所述第一传送机构上的零部件中识别目标零部件;
32、若干所述机械臂用于将所述第一传送机构上的目标零部件抓取至所述第二传送机构,以使所述第二传送机构对抓取后的目标零部件进行转运。
33、进一步的,所述支撑机构包括若干支撑腿以及支撑板,若干所述支撑腿均匀的连接在所述支撑板的底部。
34、进一步的,所述第一传送机构包括第一支撑架以及第一传送带,所述第一传送带架设于所述第一支撑架上。
35、进一步的,所述第二传送机构包括第二支撑架以及第二传送带,所述第二传送带架设于所述第二支撑架上。
技术特征:
1.一种配件分类转运方法,其特征在于,所述方法包括:
2.根据权利要求1所述的配件分类转运方法,其特征在于,所述并对所述第一传送带上的图像数据进行预处理的步骤包括:
3.根据权利要求1所述的配件分类转运方法,其特征在于,所述将各个所述零部件送入神经网络模型,并基于所述神经网络模型判断各个所述零部件的类型的步骤包括:
4.根据权利要求1所述的配件分类转运方法,其特征在于,所述依次对所述处理图像数据进行识别及分割,并输出目标零部件的像素坐标位置及掩模信息的步骤包括:
5.根据权利要求1所述的配件分类转运方法,其特征在于,所述基于所述空间位置信息驱动若干所述机械臂将与所述空间位姿信息对应的目标零部件抓取至第二传送带上的步骤包括:
6.一种配件分类转运系统,其特征在于,所述系统包括:
7.一种配件分类转运装置,应用于如权利要求6所述的配件分类转运系统上,其特征在于,包括:
8.根据权利要求7所述的配件分类转运装置,其特征在于,所述支撑机构包括若干支撑腿以及支撑板,若干所述支撑腿均匀的连接在所述支撑板的底部。
9.根据权利要求7所述的配件分类转运装置,其特征在于,所述第一传送机构包括第一支撑架以及第一传送带,所述第一传送带架设于所述第一支撑架上。
10.根据权利要求7所述的配件分类转运装置,其特征在于,所述第二传送机构包括第二支撑架以及第二传送带,所述第二传送带架设于所述第二支撑架上。
技术总结
本发明提供一种配件分类转运方法、系统及装置,方法包括基于若干个机械臂上的相机实时采集第一传送带上的图像数据,并对第一传送带上的图像数据进行预处理,得到处理图像数据;基于处理图像数据提取出各个零部件,将各个零部件输入神经网络模型,并基于神经网络模型判断各个零部件的类型,并得到目标零部件;依次对处理图像数据进行识别及分割,并输出目标零部件的像素坐标位置及掩模信息;基于像素坐标位置及掩模信息计算目标零部件的空间位置信息;基于空间位置信息驱动若干个机械臂将与空间位姿信息对应的目标零部件抓取至第二传送带上。本发明能够提升零部件的分类效率以及转运效率。
技术研发人员:王伟,王彬,李彻,兰曦晟,韦磊,王宇骞
受保护的技术使用者:山西太重工程机械有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!