一种地铁隧道异物检测与结构健康监测方法与流程
本发明涉及地铁隧道检测领域,具体涉及一种地铁隧道异物检测与结构健康检测方法。
背景技术:
1、而受不同城市地形地貌的影响,地铁的全面覆盖意味着在高海拔、高烈度地震区、埋深大等复杂危险环境的铁路建设在所难免。在复杂环境的地铁运行中,隧道坍塌、轨道开裂等安全事故发生的可能性更高,由于隧道老化、人为遗漏等带来的外来异物造成的危险也更为致命,而此时功能完备、监测精度高的隧道结构健康方法对于保障轨道交通安全正常运行显得十分重要。
2、目前隧道结构健康监测方法主要分为传统技术和现代技术两类。传统技术主要是通过监测隧道周边环境的变化,例如通过监测孔隙压力、土压力、变形、表层沉降以及所有影响该区域土壤力学的因素进行监测,具体方法有深孔位移监测技术,通过saa技术实现,该技术可靠性较高,能及时预警,但需要的监测点数量较多,且适用的深度变形监测深度较小;隧道结构应力预测法的设备存活率以及监测可靠性均较高,同样能实现实时预警,但需补充监测断面。而现代技术下的隧道结构健康监测方法在监测精度、监测自动化、检测指标完善程度等方面均有了很大的突破。光栅传感器监测方法在不影响铁路营运的情况下布设激光格网,当有对铁路行进造成阻碍的物体侵入激光格网时监测系统会立刻响应报警,实时性与自动化程度高,但监测精度受限于激光格网的大小,提高精度需要密集的光栅传感器布设,成本相对较高,且精度还受激光格网布设方式影响;三维激光扫描技术则是根据激光测距原理对隧道沉降和收敛变形进行准确的检测,监测精度高、对监测环境的适应性强,但对点云数据的数据量要求高,且后期点云数据的处理有一定复杂度,二维激光技术情况下还需要进行搬站才能实现全隧道监测,实行不方便。
3、此外,现有技术中也有通过机器视觉监测相机进行隧道结构健康监测的技术,如申请号为cn202210516879.x所公开的“一种隧道位移监测方法及系统”,然而该方法在使用影像测量机器人对靶标和棱镜进行学习拍摄时得到的隧道健康信息单一,且没有根据当前时刻的隧道健康信息对未来隧道健康情况进行合理预测;而申请号为cn201910230699.3所公开的“基于机器视觉的轨道交通站台门与列车间异物监测装置”在采集轨道交通站台门与列车之间的健康信息时将可见光图像、红外光图像及深度图像融合成立体空间三维图像,在不同车型、间隙空间大小以及复杂环境如震动和环境照度等影响下仍能实现区域内无死角、全区域检测。
4、因此,需要对现有技术的不足进行进一步地改进以解决现有技术隧道结构监测功能单一、隧道健康情况评估体系不全面的问题。
技术实现思路
1、为了解决上述技术问题,提出了一种地铁隧道异物检测与结构健康监测方法,以解决现有技术隧道结构监测功能单一、隧道健康情况评估体系不全面的问题,充分考虑隧道变形、隧道沉降变化等特性,尽可能排除隧道部分结构块掉落、外来物品遗落等异物带来的危险,更加满足工程应用需求的目的。
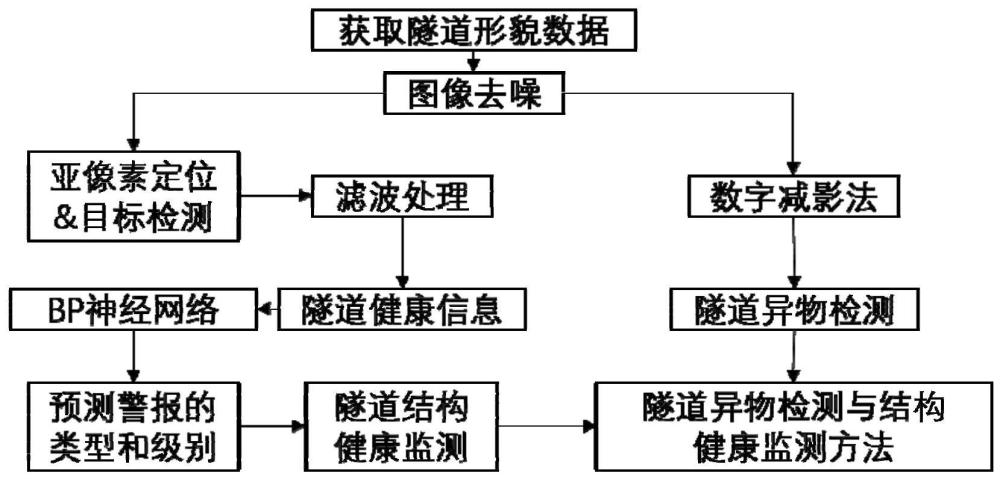
2、为实现上述目的,本发明采取的技术方案如下:一种地铁隧道异物检测与结构健康监测方法,包括以下步骤:
3、步骤s1获取数据:获取当前时刻采集的隧道形貌数据;
4、步骤s2去噪处理:对采集到的所述隧道形貌数据采取数学建模法进行去噪采样处理,获得去噪隧道形貌数据;
5、步骤s3亚像素定位处理:对去噪隧道形貌数据在连续时刻获得的图片进行图像定位,利用前后图片数据的相关性判别指标得出隧道变形量;
6、步骤s4目标检测处理:设定隧道特征点,对隧道特征点提取后得出隧道特定位置的沉降变化量,隧道特征点至少包括隧道的转角点、交接点、水平收敛点及道床变形点;
7、步骤s5滤波处理:对计算处理得到的所述隧道变形量和隧道沉降变化量进行滤波处理,从而获得对隧道健康信息的最优评估,并将所述隧道健康信息存储在主机和云端数据库,作为历史时刻的隧道健康信息;
8、步骤s6分析预警处理:根据当前时刻处理得到的隧道健康信息以及所述历史时刻处理得到的隧道健康信息,预测警报的类型和级别。
9、优选地,所述步骤s1获取数据,包括如下步骤:
10、步骤s1-1:根据所述隧道形貌数据对隧道特征点及设置的标志点进行标定,得到所述隧道特征点和所述标志点处的特征参数;
11、步骤s1-2:在隧道两侧设置的监测相机同时对隧道形貌进行拍摄,获取当前时刻采集的隧道形貌数据。
12、优选地,所述标志点为在地铁隧道设置的单面棱镜或双面棱镜。
13、优选地,所述步骤s1-1中对隧道特征点及设置的标志点进行标定,包括如下步骤:
14、步骤s1-11:在轨道交通停运时间段借助激光测距仪测量所述隧道特征点及设置的标志点到所述监测相机光心的距离;
15、步骤s1-12:借助所述监测相机的相机云台或测距仪的测角功能对所述监测相机的俯仰角和偏航角进行测量;
16、步骤s1-13:结合所述隧道特征点到所述监测相机光心的距离及所述相机俯仰角和偏航角得到所述隧道特征点及所述标志点的特征参数,实现对所述隧道特征点及所述设置的标志点的标定。
17、优选地,所述步骤s3亚像素定位处理采用数字亚像素定位法实现隧道形貌数据亚像素定位,包括以下步骤为:
18、步骤s3-1:获取监测隧道的基准隧道形貌数据;
19、步骤s3-2:选择基准隧道形貌数据中的特定目标作为隧道特征点及特征区域,对所述隧道特征点、特征区域及标注点进行标注;
20、步骤s3-3:将所述去噪隧道形貌数据f(x,y)与基准隧道形貌数据g(i,j)进行协方差相关运算:
21、
22、其中x,y和i,j分别为所述去噪隧道形貌数据和基准隧道形貌数据中的图片像素坐标,c(x,y)为互相关函数,a为特征区域,fm与gm分别是f(x,y)与g(i,j)在各自特征区域的平均值;
23、步骤s3-4:设定特征区域的函数满足高斯分布,运用二维多项式拟合法拟合函数曲面:
24、c(x,y)=a0+a1x+a2y+a3x2+a4xy+a5y2;
25、其中a0~a5为互相关函数曲面的拟合系数;
26、步骤s3-5:取互相关函数c(x,y)曲面极值点为特征区域的亚像素定位位置。
27、优选地,所述步骤s4中采用surf图像识别描述算法实现隧道形貌数据目标检测,包括步骤;
28、步骤s4-1:根据隧道形貌数据亚像素定位得到的特征区域,计算所述特征区域的积分图像,积分图像的每个像素对应原图每个像素的灰度与坐标原点形成的对角线的矩形内的所有像素的灰度值之和;
29、步骤s4-2:对于所述特征区域a(x',y'),在点(x',y')处,构建尺度为σ的hessian矩阵h(x',σ):
30、
31、其中,lxx(x',σ)是高斯二阶微分在点(x',y')处与特征区域图像的卷积,lxy(x',σ)是高斯二阶微分在点(x',y')处与特征区域图像的卷积,lyy(x',σ)是高斯二阶微分在点(x',y')处与特征区域图像的卷积。
32、步骤s4-3:计算特征区域图像所有像素的hessian矩阵的行列式,将hessian矩阵行列式取得极值的点作为该特征区域的沉降变化监测点;
33、步骤s4-4:以沉降变化监测点为中心,计算半径为6s的邻域内的点在x、y方向的haar小波响应运算,得到沉降变化监测点的特征方向,在这特征方向上图片的像素变化较为剧烈,其中s为特征点所在的尺度值,haar小波边长取4s;
34、步骤s4-5:以沉降变化监测点为中心,沿着先前计算得到的特征方向将20s×20s的图像划分成4×4个子区域,每个子区域利用尺寸2s的haar模板进行响应值的计算,统计每个子区域内25个像素的水平方向和垂直方向的haar小波特征,形成特征矢量;
35、步骤s4-6:对每个沉降变化监测点的特征矢量进行高斯加权计算,得到每个沉降变化监测点的特征描述子;
36、步骤s4-7:结合处理前后隧道形貌数据特征区域的特征描述子,以及在图像中的相对位置,得到隧道沉降变化监测点的沉降变化量。
37、优选地,所述步骤s5获得对隧道健康信息的最优评估,包括如下步骤:
38、步骤s5-1:基于滤波得到的所述隧道的变形量和所述隧道特定位置的沉降变化量,分别给出所述隧道形貌数据的隧道特征点附近区域面内变形情况和面内沉降变化情况;
39、步骤s5-2:基于隧道特征点附近区域面内变形情况和面内沉降变化情况,通过数学综合评估法,结合指标对所述隧道健康情况的指标权重,得到对所述隧道健康情况的整体最优评估。
40、优选地,所述步骤s6中基于当前时刻处理得到的隧道健康信息以及所述历史时刻处理得到的隧道健康信息,预测警报的类型和级别,包括如下步骤:
41、步骤s6-1:将历史时刻和当前时刻处理得到的隧道健康信息按照时间序列进行排序,作为bp神经网络模型的输入层;
42、步骤s6-2:根据隧道的监测环境、特征点分布情况对bp神经网络模型的隐含层进行设置,隐含层节点数目求取经验公式:
43、
44、h为隐含层节点数目,n为输入层/输出层节点数目,a为1~10之间的调节常数;
45、步骤s6-3:设节点c和位于隐含层的节点e之间的权值为ωce,节点c的阈值为bc,节点c的输出值为x″c,节点e的加权计算结果为se,节点e的输出值为x″e,有:
46、
47、其中f”为激活函数,一般选取s型函数或者线性函数;
48、步骤s6-4:基于widrow-hoff学习规则,根据梯度下降法沿着相对误差平方和的最速下降方向,连续调整网络的权值和阈值,使得误差函数值达到最小,误差函数为:
49、
50、其中y″d为网络的真值,由于输入的数据为时间序列数据,故y″d即为下一时刻的隧道健康信息数据,x″d为网络输出层的一次输出结果,与位于隐含层的节点e处的输出结果关系如下:
51、
52、其中h为隐含层节点数目,ωed为位于隐含层的节点e和位于输出层的节点d之间的权值,bd为节点d的阈值,sd为节点d的加权计算结果。
53、步骤s6-5:确定sd的表达式后,输出bp神经网络预测结果。
54、优选地,还包括s7异物检测步骤:
55、所述监测相机进入静止/营运检测模式,基于静止隧道基准形貌数据和营运隧道基准形貌数据,对所述去噪隧道形貌数据构成的图像序列分别减去对应的隧道基准形貌数据,得到各自对应的差图像,比较所述隧道特征点附近区域的灰度变化情况;
56、若变化情况大于设定的灰度阈值,则视为检测出异物,并通过基站进行警报。
57、优选地,所述变化情况可用一个二值差图像g2(i',j')表示:
58、
59、其中f(i',j',k')为去噪隧道形貌数据序列第k'幅图像的点(i',j'),f(i',j',k0)该数据序列对应的隧道基准形貌数据,t为灰度阈值。
60、本发明有益的技术效果:
61、(1)本发明对隧道形貌数据的去噪处理,去噪隧道形貌数据作为隧道结构健康监测方法和隧道异物检测方法的输入数据,提高了检测的精度;
62、(2)本发明基于隧道沉降变化量和隧道变形量等数据给出了数学综合评估模型,从多维度监测指标融合的视角解决了隧道结构监测功能单一、隧道健康情况评估体系不全面的问题;
63、(3)将当前时刻和历史时刻的隧道健康信息作为bp神经网络模型的输入层,对未来时刻的隧道健康信息进行了预测,在具有先验性的数据训练下得到的预测结果更具有鲁棒性和可靠性,更好地规避因错误预测或预测失误而带来的隧道安全事故。
- 还没有人留言评论。精彩留言会获得点赞!