一种基于改进YOLOv5的无人机小目标检测方法
本发明涉及目标检测的一种无人机小目标检测方法,具体是涉及了一种基于改进yolov5的无人机小目标检测方法。
背景技术:
1、随着无人机技术的发展和成熟,各种民用无人机开始进入大众视野,无人机在各个方面得到了广泛的应用。虽然它给我们带来了很多便利,但也带来了很多隐患。因此,对无人机小目标进行检测是非常有必要的。目前,大多数无人机探测技术都是基于雷达和光电技术。与这些方法相比,视觉检测的成本较低。尤其是随着深度学习算法的引入,视觉无人机小目标检测是最经济、快速、准确的检测方法之一。目前主流的检测网络分为单阶段检测算法和两阶段检测算法。相对而言,两阶段算法的检测准确度较高,但是,实时性欠佳,相比之下,单阶段算法更加关注检测效率与检测准确度的均衡,在目标检测领域被应用的更加广泛,其中,yolo系列的研究最为活跃,yolov5目标检测模型是当今最著名的目标识别方法之一,很好地平衡了速度和准确性。尽管yolov5算法在检测速度和精度方面表现优秀,但是在处理复杂背景下的无人机小目标检测方面还存在一些挑战,对无人机小目标检测存在较多的误检和漏检,对数据集中特征较少的无人机小目标的检测精度仍有待提高。
技术实现思路
1、为了解决背景技术中的问题,本发明的目的是提供一种基于改进yolov5的无人机小目标检测方法,加强对无人机小目标的检测性能,同时提高检测算法的轻量化性能。
2、为实现上述目的,本发明的技术方案如下:
3、一、一种基于改进yolov5的无人机小目标检测方法
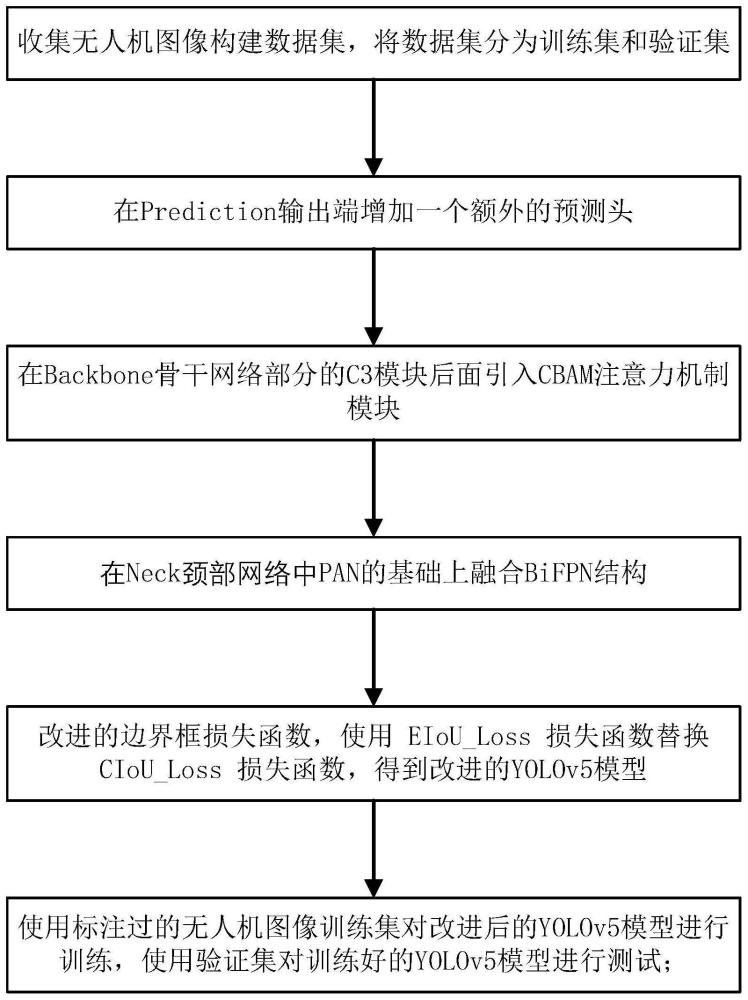
4、s1:对yolov5网络进行改进后,获得改进的yolov5网络;
5、s2:利用无人机图像数据集对改进的yolov5网络进行训练,获得无人机小目标检测网络模型;
6、s3:将待检测的无人机图像输入到无人机小目标检测网络模型中,模型输出无人机小目标检测结果。
7、所述s1具体为:
8、在yolov5网络的骨干网络backbone中引入注意力机制模块cbam,获得改进的骨干网络backbone;
9、使用双向特征金字塔网络替换yolov5网络的颈部网络neck中的panet结构后,获得改进后的颈部网络neck;
10、增加一个yolov5网络的预测头并记为第四预测头。
11、所述在yolov5网络的骨干网络backbone中引入注意力机制模块cbam,获得改进的骨干网络backbone,具体为:
12、在骨干网络backbone的所有c3模块后均增加一个注意力机制模块cbam,每个注意力机制模块cbam的输入作为对应c3模块的输出,每个注意力机制模块cbam的输出作为下一网络层的输入。
13、所述改进后的颈部网络neck具体包括多个卷积层、多个上采样层和多个c3模块,骨干网络backbone的sppf模块与改进后的颈部网络neck的第一卷积层相连,第一卷积层与第一上采样层相连,骨干网络backbone的第三c3模块的输出与第一上采样层的输出级联后再输入到改进后的颈部网络neck的第一c3模块中,改进后的颈部网络neck的第一c3模块与第二卷积层相连,第二卷积层与第二上采样层相连,骨干网络backbone的第二c3模块的输出与第二上采样层的输出级联后再输入到改进后的颈部网络neck的第二c3模块中,改进后的颈部网络neck的第二c3模块与第三卷积层相连,第三卷积层与第三上采样层相连,骨干网络backbone的第一c3模块的输出与第三上采样层的输出级联后输入到改进后的颈部网络neck的第三c3模块中,改进后的颈部网络neck的第三c3模块与第四预测头相连;改进后的颈部网络neck的第三c3模块还与第四卷积层相连,第四卷积层的输出、第三卷积层的输出和骨干网络backbone的第二c3模块的输出级联后再输入到改进后的颈部网络neck的第四c3模块中,改进后的颈部网络neck的第四c3模块与第三检测头相连;改进后的颈部网络neck的第四c3模块与第五卷积层相连,第五卷积层的输出、第二卷积层的输出和骨干网络backbone的第三c3模块的输出级联后再输入到改进后的颈部网络neck的第五c3模块中,改进后的颈部网络neck的第五c3模块与第二检测头相连;改进后的颈部网络neck的第五c3模块与第六卷积层相连,第六卷积层的输出、第一卷积层的输出和第六卷积层的输出级联后再输入到改进后的颈部网络neck的第六c3模块中,改进后的颈部网络neck的第六c3模块与第一检测头相连。
14、所述s2中,采用eiou_loss损失函数替换yolov5网络的ciou_loss损失函数,完成对改进的yolov5网络的监督训练。
15、二、一种计算机设备
16、所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述方法的步骤。
17、三、一种计算机可读存储介质
18、所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述的方法的步骤。
19、本发明的有益效果是:
20、本发明通过增加额外预测头,从网络的较浅层中提取特征,提高模型对无人机小目标的检测精度;引入cbam注意力机制,增强无人机小目标的特征提取,减少复杂背景元素对无人机小目标的干扰;使用bifpn网络结构,加强了更高层次的特征融合并且提高了检测的速度;使用eiou损失函数提高了对宽度和高度的敏感度,优化了检测无人机小目标的效率,加速了模型收敛。本发明能够提高对无人机小目标的检测精度和检测速度,获得了更高的检测性能。
技术特征:
1.一种基于改进yolov5的无人机小目标检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于改进yolov5的无人机小目标检测方法,其特征在于,所述s1具体为:
3.根据权利要求2所述的一种基于改进yolov5的无人机小目标检测方法,其特征在于,所述在yolov5网络的骨干网络backbone中引入注意力机制模块cbam,获得改进的骨干网络backbone,具体为:
4.根据权利要求2所述的一种基于改进yolov5的无人机小目标检测方法,其特征在于,所述改进后的颈部网络neck具体包括多个卷积层、多个上采样层和多个c3模块,骨干网络backbone的sppf模块与改进后的颈部网络neck的第一卷积层相连,第一卷积层与第一上采样层相连,骨干网络backbone的第三c3模块的输出与第一上采样层的输出级联后再输入到改进后的颈部网络neck的第一c3模块中,改进后的颈部网络neck的第一c3模块与第二卷积层相连,第二卷积层与第二上采样层相连,骨干网络backbone的第二c3模块的输出与第二上采样层的输出级联后再输入到改进后的颈部网络neck的第二c3模块中,改进后的颈部网络neck的第二c3模块与第三卷积层相连,第三卷积层与第三上采样层相连,骨干网络backbone的第一c3模块的输出与第三上采样层的输出级联后输入到改进后的颈部网络neck的第三c3模块中,改进后的颈部网络neck的第三c3模块与第四预测头相连;改进后的颈部网络neck的第三c3模块还与第四卷积层相连,第四卷积层的输出、第三卷积层的输出和骨干网络backbone的第二c3模块的输出级联后再输入到改进后的颈部网络neck的第四c3模块中,改进后的颈部网络neck的第四c3模块与第三检测头相连;改进后的颈部网络neck的第四c3模块与第五卷积层相连,第五卷积层的输出、第二卷积层的输出和骨干网络backbone的第三c3模块的输出级联后再输入到改进后的颈部网络neck的第五c3模块中,改进后的颈部网络neck的第五c3模块与第二检测头相连;改进后的颈部网络neck的第五c3模块与第六卷积层相连,第六卷积层的输出、第一卷积层的输出和第六卷积层的输出级联后再输入到改进后的颈部网络neck的第六c3模块中,改进后的颈部网络neck的第六c3模块与第一检测头相连。
5.根据权利要求2所述的一种基于改进yolov5的无人机小目标检测方法,其特征在于,所述s2中,采用eiou_loss损失函数替换yolov5网络的ciou_loss损失函数,完成对改进的yolov5网络的监督训练。
6.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5中任一项所述方法的步骤。
7.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述的方法的步骤。
技术总结
本发明公开了一种基于改进YOLOv5的无人机小目标检测方法。本发明包括以下步骤:首先,对YOLOv5网络进行改进后,获得改进的YOLOv5网络;接着,利用无人机图像数据集对改进的YOLOv5网络进行训练,获得无人机小目标检测网络模型,进而实现待检测无人机图像的目标检测。本发明通过增加额外预测头,从网络的较浅层中提取特征,提高模型对无人机小目标的检测精度;引入CBAM注意力机制,增强无人机小目标的特征提取,减少复杂背景元素对无人机小目标的干扰;使用BiFPN网络结构,加强了更高层次的特征融合并且提高了检测的速度;本发明能够提高对无人机小目标的检测精度和检测速度,获得了更高的检测性能。
技术研发人员:邱潇,陈嘉豪,陆毓晟,郑恩辉
受保护的技术使用者:中国计量大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!