一种基于角位移的实时风电机组塔筒截面载荷反演方法与流程
本发明涉及风力发电塔筒,尤其是一种基于角位移的实时风电机组塔筒截面载荷反演方法。
背景技术:
1、随着风电行业的快速发展,降低建设成本及提高发电效率成为了提高风电经济性的核心途径。国内外风电企业为了降低风电的度电成本,提升产品盈利能力,使得叶片逐渐朝着大型化、轻量化发展,为捕捉更优质的风资源,也要求塔筒高度不断突破。
2、大容量机组运行伴随着更大的载荷,同时,更高的塔筒还要面对机组的共振问题,如果塔筒载荷超限,势必存在风机倒塔甚至机毁人亡的风险。为保障风力发电机组的正常运行,减少塔筒的安全隐患,降低机组运行的极限载荷,需要对塔筒载荷进行监控,并对塔筒的实时运行进行降载控制。
3、目前,应变片测量是公认直接测量载荷主要方法,它主要原理是依据机械变形引起电阻改变从而得到测点应力,是一种微观测量方法,但对于塔筒而言,塔筒载荷只能根据应变片测点应力反推载荷,会受到塔筒几何尺寸、测点位置的影响,且此方法只能测量弯矩,不能测量推力,同时,应变片会受到环境、线路等因素制约。因此需要一种新的方法对塔筒载荷进行监控。
技术实现思路
1、本发明的发明目的在于:针对上述存在的问题,提供一种基于角位移的实时风电机组塔筒截面载荷反演方法,能够实时控制塔筒运行载荷,保证风力发电机组的正常运行。
2、本发明采用的技术方案如下:
3、一种基于角位移的塔筒实时载荷反演计算方法,包括以下步骤:
4、步骤1、通过塔顶推力、弯矩载荷建立塔筒截面角位移的数学模型;
5、步骤2、基于步骤1的数学模型反演出基于角位移的塔顶推力、弯矩计算模型;
6、步骤3、通过传感器测量塔筒两个不同截面的实时角位移,通过步骤2的计算方法得到塔顶的实时推力、弯矩;
7、步骤4、根据力的平移定理计算出每个塔筒截面的实时推力和弯矩;
8、步骤5、基于实时推力和弯矩,根据塔筒设计规范对塔筒进行实时校核;
9、步骤6、将校核计算结果与预设指标进行对比;
10、步骤7、将对比结果给到风力发电机组控制系统,从而实现塔筒载荷控制,降低机组载荷。
11、由于风电机组在运转过程中,主要的任务是把运动的空气的动能,也就是风能转化成电能。风力电机在运行过程中承受着多种应力和载荷。载荷是设备结构设计的依据,其分析计算在设计过程中非常关键。风电机组载荷主要分为气动载荷和惯性矩载荷,气动载荷主要包括稳态风、剪切风等,惯性矩载荷主要包括离心力、重力等,随着环境变化及运行工况的不同,机组整个生命周期所受到的载荷都是动态的。因此,本方案采用角位移对塔筒进行实时的宏观测量,进而得到弯矩以及推力。不会受到塔筒几何尺寸、测点位置的影响,同时,也不受环境、线路等因素制约。可以提前发现荷载异常的情况并及时处理,避免因未及时维修产生的额外成本。有效提高风电塔的安全性能,避免塔身承受超负荷的情况发生,从而保障风力发电的稳定运行。
12、步骤3中,塔筒设计主要受推力、弯矩约束,塔筒各个界面载荷可以根据塔顶载荷由力的平移定理得出,而塔顶载荷反演包含塔顶推力、弯矩两个未知量,因此为求解反演方程组,至少需要两个输入数据,也即是输入两个截面的数据。步骤4中,由于目前塔筒均是定制化设计,每一节塔筒都是依据对应的截面载荷设计得到。因此,要判断塔筒是否安全,必须要计算出每个截面载荷,并校核每一节塔筒。
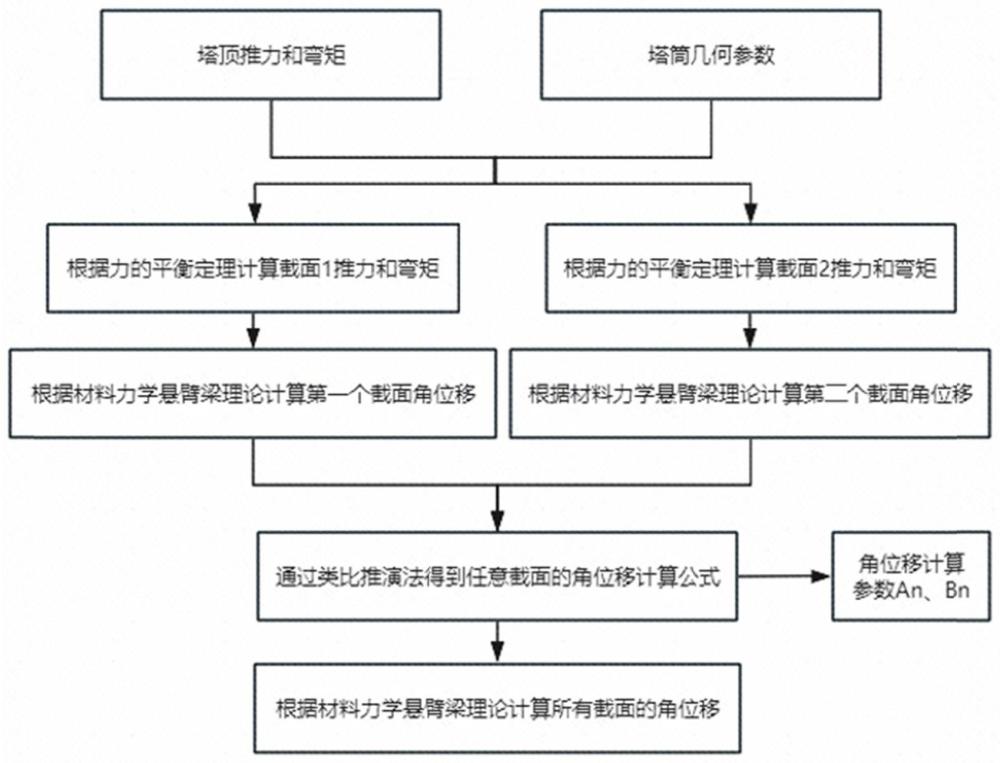
13、进一步的,步骤1中,基于塔顶推力、弯矩和塔筒几何参数,根据力的平衡定理及悬臂梁位移计算公式得到,塔筒第一截面角位移为:
14、
15、其中,θ1为塔筒第一截面的角位移,l1为第一节塔筒高度,lm为第m节塔筒高度,i1为第一节塔筒惯性矩,e1为第一节塔筒弹性模量,k为塔筒截面总数,f为塔顶推力。
16、同理,塔筒第二截面的角位移为:
17、
18、其中,θ1为塔筒第一截面的角位移,θ2为塔筒第二截面的角位移,l2为第二节塔筒高度,lm为第m节塔筒高度,i2为第二节塔筒惯性矩,e2为第二节塔筒弹性模量,k为塔筒截面总数,f为塔顶推力。
19、进一步的,采用类比推演法,可得到任意截面角位移计算公式:
20、θi=aif+bim
21、其中:ai、bi为角位移计算参数:
22、
23、其中,ln为第n节塔筒高度,in为第n节塔筒惯性矩,en为第n节塔筒弹性模量,k为塔筒截面总数,f为塔顶推力,m为塔顶弯矩。
24、可供选择的,风电机组的除了等截面塔筒,还有锥段的变截面塔筒。若第n节塔筒为锥形截面,则惯性矩可表示为:
25、
26、其中,dn1为第n节塔筒的顶直径,dn2为第n节塔筒的底直径,tn为第n节塔筒的厚度。
27、进一步的,在步骤2中,若已知任意两截面角位移,可以通过载荷反演方程组得到塔顶推力、弯矩:
28、
29、其中,f为塔顶推力,n为塔顶弯矩,θi为一截面角位移,ai、bi为一截面角位移计算参数,θj为另一截面角位移,aj、bj为另一截面角位移计算参数。
30、进一步的,步骤3中,可以在塔筒任意两个截面布置传感器,实时测量两截面的角位移。为提高测量精度,传感器布置位置一般在塔顶及塔顶相邻的塔筒截面。
31、进一步的,根据上述计算方法,带入角位移计算参数及测量的角位移,计算得到塔顶载荷f、m。
32、进一步的,采用力的平移定理得到任意截面的推力和弯矩:
33、
34、其中,fi为该截面的推力,f为塔顶推力,mi为该截面的弯矩,m为塔顶弯矩,lm为该截面下一截面的高度。
35、进一步的,根据塔筒设计规范对塔筒进行实时校核,计算得到塔筒各节的校核(屈曲、强度)系数λi。
36、进一步的,出于机组运行安全性考虑,与给定的校核指标λ进行对比。将对比结果给到风力发电机组控制系统,若λi<λ,表明塔筒安全,机组可正常运行;反之,需要控制系统对机组运行做出调节,精准降低塔筒载荷。
37、综上所述,由于采用了上述技术方案,本发明的有益效果是:
38、本发明所提供的一种基于角位移的实时风电机组塔筒截面载荷反演方法,基于角位移的塔筒实时载荷反演计算方法通过对塔筒各节的校核(屈曲、强度)系数计算,与给定的校核指标进行对比,从而实现对机组更高精度的控制,有效的解决了塔筒实时荷载的控制,保证风力发电机组的正常运行。
技术特征:
1.一种基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:包括以下步骤:
2.如权利要求1所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:步骤1中,任意截面角位移计算公式:
3.如权利要求2所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:当第n节塔筒为锥形截面时,则惯性矩为:
4.如权利要求1所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:步骤2中,塔顶推力、弯矩的计算公式为:
5.如权利要求1所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:步骤3中,在塔筒任意两个截面布置传感器,实时测量两截面的角位移。
6.如权利要求5所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:传感器布置位置在塔顶及塔顶相邻的塔筒截面。
7.如权利要求1所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:步骤4中,任意截面的推力和弯矩的计算公式为:
8.如权利要求1所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:步骤5中,根据塔筒设计规范对塔筒进行实时校核,计算得到塔筒各节的校核系数λi。
9.如权利要求所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:所述校核系数包括屈曲系数以及强度系数。
10.如权利要求8所述的基于角位移的实时风电机组塔筒截面载荷反演方法,其特征在于:步骤7中,将对比结果给到风力发电机组控制系统,若λi<λ,表明塔筒安全,机组可正常运行;反之,需要控制系统对机组运行做出调节,精准降低塔筒载荷。
技术总结
本发明公开了一种基于角位移的实时风电机组塔筒截面载荷反演方法,包括以下步骤:通过塔顶推力、弯矩载荷建立塔筒截面角位移的数学模型;基于步骤1的数学模型反演出基于角位移的塔顶推力、弯矩计算模型;通过传感器测量塔筒两个不同截面的实时角位移,通过步骤2的计算方法得到塔顶的实时推力、弯矩;根据力的平移定理计算出每个塔筒截面的实时推力和弯矩;基于实时推力和弯矩,根据塔筒设计规范对塔筒进行实时校核;将校核计算结果与预设指标进行对比;将对比结果给到风力发电机组控制系统,从而实现塔筒载荷控制,降低机组载荷。能够实时控制塔筒运行载荷,保证风力发电机组的正常运行。
技术研发人员:兰成坤,龚学进,刘朝丰,李源,王涛,孙州,蔡军喜,孙英,兰杰,尹景勋
受保护的技术使用者:东方电气风电股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!