多自由度减振平台的综合监测方法、设备及介质
本技术涉及多自由度减振平台的综合监测,尤其涉及一种多自由度减振平台的综合监测方法、设备及介质。
背景技术:
1、随着科学技术的快速发展,多自由度减振平台被广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。目前关于多自由度减振平台的研究主要聚焦于平台减振性能的提升。
2、但是,多自由度减振平台在实际应用时,的各构件均处于运动状态,并主要通过支腿内部元件的运动进行能量的吸收、转移、耗散,属于易损结构,缺乏对多自由度减振平台的综合监测的研究。
3、因此,有必要提出一种多自由度减振平台的综合监测方案,避免因状态异常导致平台失稳和平台结构件损伤恶化,为多自由度减振平台和减振对象的持续正常运行提供保障。
技术实现思路
1、本技术的主要目的在于提供一种多自由度减振平台的综合监测方法、设备及介质,旨在有效实现多自由度减振平台的综合监测,避免因状态异常导致平台失稳和平台结构件损伤恶化,为多自由度减振平台和减振对象的持续正常运行提供保障。
2、为实现上述目的,本技术提供一种多自由度减振平台的综合监测方法,所述多自由度减振平台的综合监测方法包括:
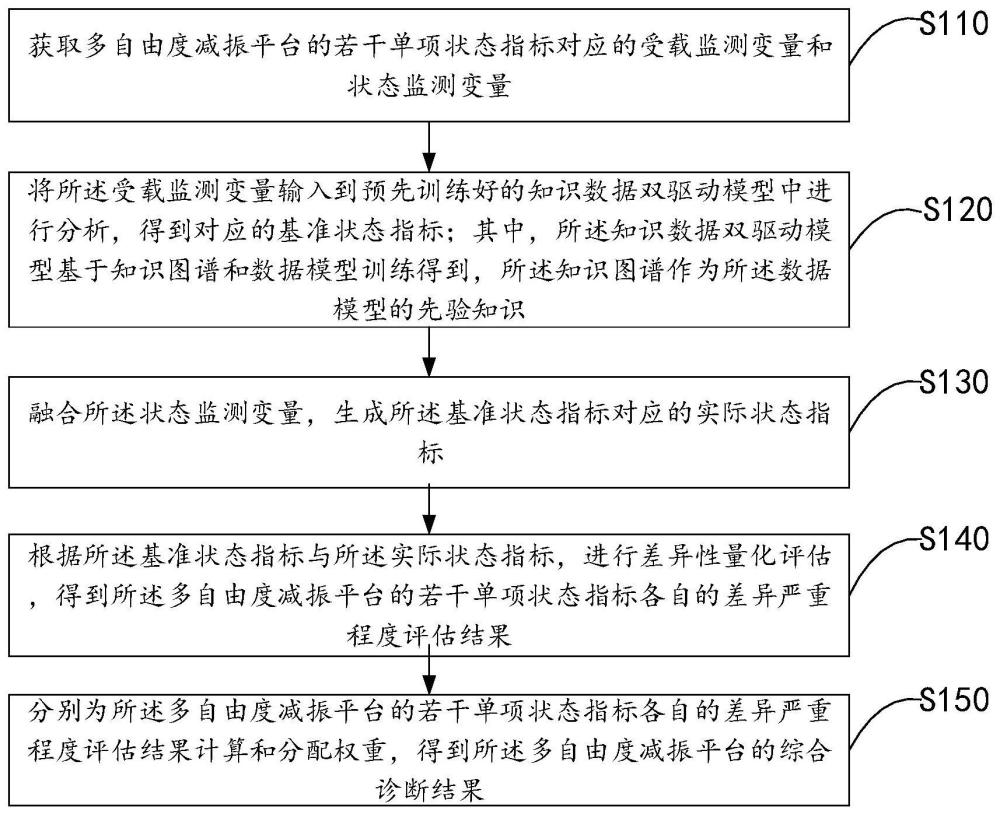
3、获取多自由度减振平台的受载监测变量和状态监测变量;
4、将所述受载监测变量输入到预先训练好的知识数据双驱动模型中进行分析,得到对应的基准状态指标;其中,所述知识数据双驱动模型基于知识图谱和数据模型训练得到,所述知识图谱作为所述数据模型的先验知识;
5、融合所述状态监测变量,生成所述基准状态指标对应的实际状态指标;
6、根据所述基准状态指标与所述实际状态指标,进行差异性量化评估,得到所述多自由度减振平台的若干单项状态指标各自的差异严重程度评估结果;
7、分别为所述多自由度减振平台的若干单项状态指标各自的差异严重程度评估结果计算和分配权重,得到所述多自由度减振平台的综合诊断结果。
8、可选地,所述知识数据双驱动模型的训练过程包括:
9、获取受载监测变量数据集、状态监测变量数据集;
10、对所述状态监测变量数据集中的数据进行融合,得到样本实际状态指标;
11、构建所述数据模型,并根据所述多自由度减振平台的物理特征及其关联关系构建所述知识图谱;
12、将所述知识图谱作为贝叶斯方法的先验知识,以采用所述贝叶斯方法,结合所述知识图谱和所述数据模型,得到初始双驱动模型;
13、将所述受载监测变量数据集中的数据输入到所述初始双驱动模型中进行预测,得到训练结果;
14、结合所述训练结果和所述样本实际状态指标,对所述初始双驱动模型进行参数调整,得到参数调整后的所述初始双驱动模型;
15、返回所述将所述受载监测变量数据集中的数据输入到所述初始双驱动模型中进行预测,得到训练结果的步骤;以此类推,进行参数迭代,直到所述训练结果和所述样本实际状态指标达到一致时,得到训练好的所述知识数据双驱动模型。
16、可选地,所述根据所述基准状态指标与所述实际状态指标进行差异性量化评估,得到所述多自由度减振平台的若干单项状态指标各自的差异严重程度评估结果的步骤包括:
17、对比所述基准状态指标与所述实际状态指标,得到残差数据,并对所述残差数据开展损伤假设检验,得到检验结果;
18、根据所述检验结果确认所述残差数据是否满足预设阈值;所述残差数据表征所述多自由度减振平台的损伤状态和/或过载状态和/或上顶板平稳状态;
19、若所述残差数据满足所述阈值,则所述多自由度减振平台的若干单项状态指标对应的评估结果为正常;
20、若所述残差数据不满足预设阈值,则所述多自由度减振平台的若干单项状态指标对应的评估结果为异常。
21、可选地,所述若所述残差数据不满足预设阈值,则所述多自由度减振平台的若干单项状态指标对应的评估结果为异常的步骤之后,还包括:
22、采用假设检验法,对所述残差数据进行严重程度的分级,得到分级结果;
23、根据所述分级结果进行分级报警。
24、可选地,所述分别为所述多自由度减振平台的若干单项状态指标各自的差异严重程度评估结果计算和分配权重,得到所述多自由度减振平台的综合诊断结果的步骤包括:
25、采用预设层次分析法对所述评估结果进行分析,得到主观权重;
26、获取所述残差数据的二范数的倒数或绝对值之和的倒数,与,所述误差数据的状态异常概率,以作为客观权重;
27、根据所述主观权重和所述客观权重,建立以权重参数为变量的权重优化函数;
28、将所述差异严重程度评估结果与所述权重优化函数相结合,得到所述综合诊断结果。
29、可选地,所述将所述差异严重程度评估结果与所述权重优化函数相结合,得到所述综合诊断结果的步骤包括:
30、采用贝叶斯加权融合方法、d-s证据理论、线性加权平均方法中的任一方法,将所述差异严重程度评估结果与所述权重优化函数相结合,得到所述综合诊断结果。
31、可选地,所述分别为所述多自由度减振平台的若干单项状态指标各自的差异严重程度评估结果计算和分配权重,得到所述多自由度减振平台的综合诊断结果的步骤之后,还包括:
32、将所述综合诊断结果反馈入所述知识图谱,以扩充所述知识图谱;其中,所述知识图谱包含机理信息、状态特征和诊断结果。
33、可选地,所述多自由度减振平台的若干单项状态指标包括支座、平板、支腿、中心位置防过载弹簧阻尼支座中的至少两个,所述平板包括上平板和下平板;
34、所述受载监测变量包括所述多自由度减振平台的结合位置的应力、所述上平板的加速度-倾角和下平板的加速度-倾角、所述下平板的加速度和倾角、所述平板与所述支腿之间的内力、所述下平板的过载压力;
35、所述状态监测变量包括所述上平板和所述下平板的相对位移、所述上平板的加速度和倾角、所述支腿的伸缩部和固定部之间的相对速度、所述支腿的伸缩部和固定部之间的相对位移;
36、所述支座和所述平板的结合位置领域内设有智能蒙皮传感器,所述智能蒙皮传感器用于获取所述结合位置的应力;
37、所述平板设有加速度-倾角一体化传感器和相对位移传感器,所述加速度-倾角一体化传感器用于获取所述上平板的加速度-倾角和下平板的加速度-倾角,所述相对位移传感器用于获取所述上平板和所述下平板的相对位移;
38、所述支腿设有支腿速度传感器、支腿位移传感器、支腿力传感器;所述支腿速度传感器用于获取所述支腿的伸缩部和固定部之间的相对速度;所述支腿位移传感器用于获取所述支腿的伸缩部和固定部之间的相对位移;所述支腿力传感器用于获取所述平板与所述支腿之间的内力;
39、所述中心位置防过载弹簧阻尼支座设有压力传感器;所述压力传感器用于获取所述下平板的过载压力。
40、本技术实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的多自由度减振平台的综合监测程序,所述多自由度减振平台的综合监测程序被所述处理器执行时实现如上所述的多自由度减振平台的综合监测方法的步骤。
41、本技术实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有多自由度减振平台的综合监测程序,所述多自由度减振平台的综合监测程序被处理器执行时实现如上所述的多自由度减振平台的综合监测方法的步骤。
42、本技术实施例提出的多自由度减振平台的综合监测方法、装置、终端设备以及存储介质,通过获取多自由度减振平台的若干单项状态指标的受载监测变量和状态监测变量;将受载监测变量输入到知识-数据双驱动模型中进行分析,得到基准状态指标;融合状态监测变量,生成基准状态指标对应的实际状态指标;根据基准状态指标与实际状态指标,进行差异性量化评估,得到差异严重程度的评估结果;为各项评估结果计算和分配权重,得到多自由度减振平台的综合诊断结果,可以有效实现多自由度减振平台的综合监测,避免因状态异常导致平台失稳和平台结构件损伤恶化,为多自由度减振平台和减振对象的持续正常运行提供保障。
- 还没有人留言评论。精彩留言会获得点赞!