一种视觉要素对骑行环境评价影响强度的分析方法及系统
本技术涉及计算机,尤其涉及一种视觉要素对骑行环境评价影响强度的分析方法及系统。
背景技术:
1、居民的骑行意愿通常受到对街道骑行环境的主观感知评价的影响。当居民认为当地街道的骑行环境不安全或不舒适时,他们的骑行意愿相应地降低。有效地测量居民对街道骑行环境的主观评价感知,并分析街道骑行环境对居民骑行感知的影响机制,对提高居民的骑行意愿,建设骑行友好型城市至关重要。由于居民对环境的主观感知通常不够具体,且不同人之间的主观感知存在较大差异,这为测量居民的主观感知带来了困难。然而,随着街景影像的普及和机器学习的发展,出现了新的可能性。街景影像使受试者在无需亲自到达现场的情况下能够观察当地的街道环境,而机器学习则能够模拟每位受试者的主观感知,有效捕捉不同人之间的感知差异。
2、现有的结合街景影像和机器学习对居民主观感知进行测量的方法主要分为两大类:一是模拟设施审查法,通过先验知识建立评价指数,从街景影像中提取视觉特征计算感知分数;二是模拟评分法,招募受试者对街景影像的街道环境进行主观感知评分,利用评分数据结合机器学习模拟主观感知。模拟设施审查法通常用于模拟审查街道设施对居民感知评价的影响,如通过街景影像中的垃圾和损坏设施评价街道整洁程度。模拟评分法则适用于测量居民更主观、个人化的感知,如当地交通安全性和街景美丽程度。模拟设施审计法由于不需要招募大量受试者进行评分,仅需要通过内业对街景进行处理,成本较低,但由于居民的主观感知通常难以构建量化的评分指标,不需要提前构建评分指标的模拟评分法更适合用于测量居民对于街道骑行环境的主观感知评价。然而,已有的模拟评分法存在以下不足:(1)目前使用模拟评分法的研究尚未对居民对街道骑行环境的主观感知评价进行收集与模拟;(2)机器学习准确模拟居民主观感知时对数据量庞大的需求,与受试者精力有限导致评分所得到的数据较小的体量之间存在矛盾。由于无法对受试者所评价的街景进行提前标注,也就无法通过推荐算法调整推送给受试者的街景图片中积极评价的场景与消极评价的场景之间的比例,导致最终得到的街道骑行环境评分数据类别不均衡。基于这样的数据进行训练所得到的机器学习模型,会出现对数据中的多数类过拟合的现象,表现为模型倾向于给出多数类评分,而忽视少数类评分;(3)未有研究聚焦于街道视觉环境要素对影响居民对街道骑行环境的主观感知的影响强度分析。
技术实现思路
1、本技术实施例的主要目的在于提出一种视觉要素对骑行环境评价影响强度的分析方法及系统,旨在实现准确模拟或预测受试者对街道骑行环境的主观感知评分,并基于该主观感知评分准确测量视觉环境要素对居民对街道骑行环境主观感知的影响强度。
2、为实现上述目的,本技术实施例的一方面提出了一种视觉要素对骑行环境评价影响强度的分析方法,所述方法包括:
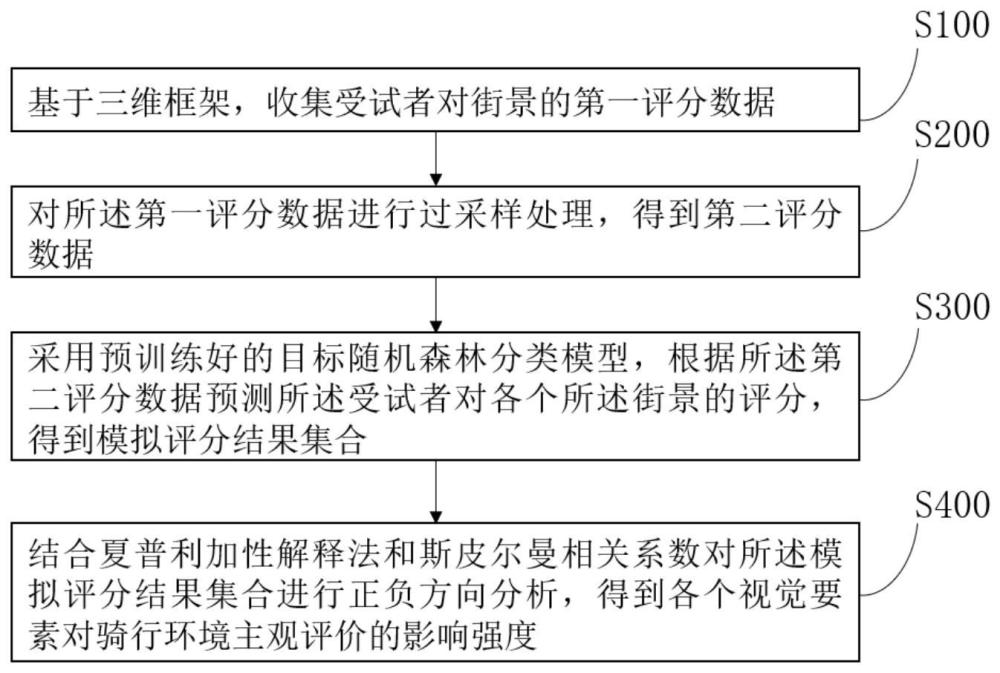
3、基于三维框架,收集受试者对街景的第一评分数据;
4、对所述第一评分数据进行过采样处理,得到第二评分数据;
5、采用预训练好的目标随机森林分类模型,根据所述第二评分数据预测所述受试者对各个所述街景的评分,得到模拟评分结果集合;
6、结合夏普利加性解释法和斯皮尔曼相关系数对所述模拟评分结果集合进行正负方向分析,得到各个视觉要素对骑行环境主观评价的影响强度。
7、在一些实施例中,所述基于三维框架,收集受试者对街景的第一评分数据,包括:
8、配置对应三维框架中每一维度的街景环境图片、街景编号、提示文字和评分选项;
9、为所述受试者分配受试者编号;
10、获取所述受试者根据所述街景环境图片和所述提示文字选择的所述评分选项,得到真实评分结果;
11、将所述街景编号、所述受试者编号和所述真实评分结果整合为第一评分数据。
12、在一些实施例中,所述对所述第一评分数据进行过采样处理,得到第二评分数据,包括:
13、根据所述第一评分数据的不平衡程度,通过kmeans聚类算法将所述第一评分数据划分为若干个初始组别;
14、根据所述初始组别,确定少数类组别;
15、在所述少数类组别中,根据聚类特征生成新样本,直至所述第一评分数据达到平衡状态,得到第二评分数据。
16、在一些实施例中,所述结合夏普利加性解释法和斯皮尔曼相关系数对所述模拟评分结果集合进行正负方向分析,得到各个视觉要素对骑行环境主观评价的影响强度,包括:
17、计算所述评分结果集合中正向样本的夏普利值;
18、根据所述夏普利值,结合斯皮尔曼相关系数确定视觉要素对所述评价结果影响的正负偏向;
19、根据所述夏普利值在所述目标随机森林分类模型中的升序排名,确定排名权重系数;
20、根据所述排名权重系数,确定所述视觉要素对受试者主观骑行感知的影响强度。
21、在一些实施例中,所述方法还包括:
22、根据所述模拟评分结果集合中的正面评分数量和负面评分数量,确定正面评价比例;
23、采用地理信息系统软件,将所述正面评价比例和街景编号进行关联显示。
24、在一些实施例中,所述方法还包括:
25、根据所述视觉要素的正负偏向和所述影响强度,构造所述视觉要素对街道骑行环境的主观评价四象限图。
26、在一些实施例中,目标随机森林分类模型的训练步骤,包括:
27、构建初始随机森林分类器;
28、对街景进行语义分割,得到视觉要素;
29、采用网格搜索法确定超参数;
30、将受试者评分数据作为因变量,将视觉要素占比作为自变量,基于所述超参数,对所述初始随机森林分类器进行训练,得到目标随机森林分类器。
31、为实现上目的,本技术实施例的另一方面提出了一种视觉要素对骑行环境评价影响强度的分析系统,所述系统包括:
32、第一模块,用于基于三维框架,收集受试者对街景的第一评分数据;
33、第二模块,用于对所述第一评分数据进行过采样处理,得到第二评分数据;
34、第三模块,用于采用预训练好的目标随机森林分类模型,根据所述第二评分数据预测所述受试者对各个所述街景的评分,得到模拟评分结果集合;
35、第四模块,用于结合夏普利加性解释法和斯皮尔曼相关系数对所述模拟评分结果集合进行正负方向分析,得到各个视觉要素对骑行环境主观评价的影响强度。
36、需要说明的是,在一些实施例中,该系统还可以包括以下模块至少之一:
37、第五模块,用于根据所述模拟评分结果集合中的正面评分数量和负面评分数量,确定正面评价比例;采用地理信息系统软件,将所述正面评价比例和街景编号进行关联显示;
38、第六模块,用于根据所述视觉要素的正负偏向和所述影响强度,构造所述视觉要素对街道骑行环境的主观评价四象限图;
39、第七模块,用于根据受试者评分数据训练随机森林分类模型。
40、为实现上述目的,本技术实施例的另一方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现前面所述的方法。
41、为实现上述目的,本技术实施例的另一方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前面所述的方法。
42、本技术实施例至少包括以下有益效果:本技术提供一种视觉要素对骑行环境评价影响强度的分析方法及系统,该方案能够基于有限的受试者评分数据,通过目标随机森林分类模型准确预测出受试者对所有街景的模拟评分结果,并且基于这些模拟评分结果,结合夏普利加性解释和斯皮尔曼相关系数,有利于准确分析各个视觉要素对骑行环境主观评价的影响强度。
- 还没有人留言评论。精彩留言会获得点赞!