高精度地图限速标志牌更新方法、系统及介质与流程
本发明涉及高精度地图,特别涉及一种高精度地图限速标志牌更新方法、系统及介质。
背景技术:
1、随着城市的快速发展,交通设施系统的变化十分频繁。为了保证高精度电子地图的现势性,及时反映现实世界中地物的实际变化,必须不断对地图要素进行更新。受测绘更新高成本的影响,单凭测绘数据无法满足地图对鲜度的要求。考虑到众包数据相对更低的成本、更高的鲜度和覆盖率,高精度电子地图制作行业可以采用众包数据对地图进行更新。限速标志牌是地图中重要的地物元素,现实中限速标志牌的新增、限速值调整等变化会直接影响驾驶规控和决策.
2、因此针对上述问题,需要一种利用低精度、高鲜度众包数据自动识别限速标志牌差异并更新母库的方法,以在保证地图现势性的同时提高地图生产制作效率。
技术实现思路
1、本发明的提供一种高精度地图限速标志牌更新方法、系统及介质,利用采集车对待测道路进行数据采集的多个轨迹数据进行高精地图限速牌更新,有利于减少人工抽检成本,提高高精度地图制作匹配效率。
2、第一方面,提供一种高精度地图限速标志牌更新方法,包括以下步骤:
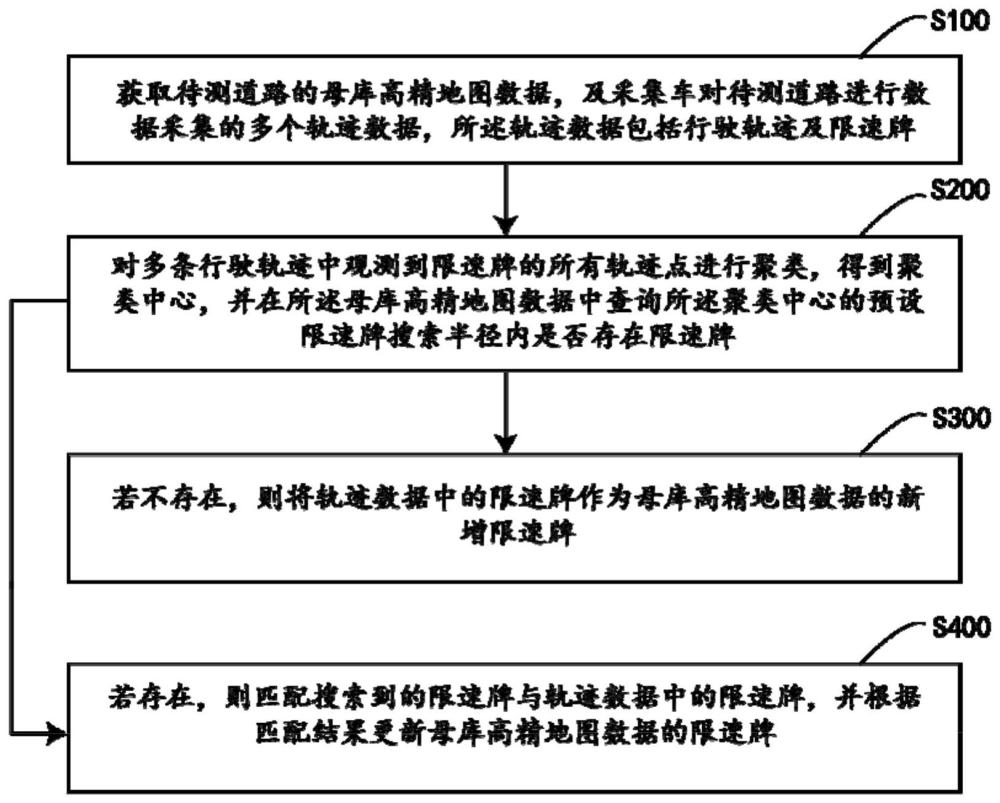
3、获取待测道路的母库高精地图数据,及采集车对待测道路进行数据采集的多个轨迹数据,所述轨迹数据包括行驶轨迹及限速牌;
4、对多条行驶轨迹中观测到限速牌的所有轨迹点进行聚类,得到聚类中心,并在所述母库高精地图数据中查询所述聚类中心的预设限速牌搜索半径内是否存在限速牌;
5、若不存在,则将轨迹数据中的限速牌作为母库高精地图数据的新增限速牌;
6、若存在,则匹配搜索到的限速牌与轨迹数据中的限速牌,并根据匹配结果更新母库高精地图数据的限速牌。
7、根据第一方面,在第一方面的第一种可能的实现方式中,所述“匹配搜索到的限速牌与轨迹数据中的限速牌,并根据匹配结果更新母库高精地图数据的限速牌”步骤,具体包括以下步骤:
8、在所述母库高精地图数据中获取每条行驶轨迹对应的目标车道向量;
9、在母库高精地图数据中对搜索到的限速牌进行关联道路拓扑搜索,得到母库关联车道向量;
10、比对所述所述目标车道向量与所述母库关联车道向量,根据比对结果匹配搜索到的限速牌与轨迹数据中的限速牌,并根据匹配结果更新母库高精地图数据的限速牌。
11、根据第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述“在所述母库高精地图数据中获取每条行驶轨迹对应的目标车道向量”步骤,具体包括以下步骤:
12、对每条行驶轨迹按预设采样间隔进行采样,得到每条行驶轨迹对应的多个采样点;
13、对于每条行驶轨迹的每个采样点,在预设轨迹搜索半径内查询母库高精地图数据中的所有车道向量,并在每个所述车道向量上选取距离采样点最近的点作为轨迹候选点,得到每个采样点对应的轨迹候选点集;
14、根据每个采样点对应的轨迹候选点集,并基于轨迹候选点的观测概率及转移概率,得到每条行驶轨迹对应的目标候选点集,并得到目标候选点集在母库高精地图数据中所属的目标车道向量。
15、根据第一方面的第二种可能的实现方式,在第一方面的第三种可能的实现方式中,所述“根据每个采样点对应的轨迹候选点集,并基于轨迹候选点的观测概率及转移概率,得到每条行驶轨迹对应的目标候选点集”步骤,具体包括以下步骤:
16、对于每条行驶轨迹的每个采样点对应的轨迹候选点集,基于轨迹候选点的观测概率及转移概率计算轨迹候选点集中的每个轨迹候选点的得分;
17、选取每条行驶轨迹得分最大的轨迹候选点序列作为对应的目标候选点集。
18、根据第一方面的第三种可能的实现方式中,在第一方面的第四种可能的实现方式中,所述“基于轨迹候选点的观测概率及转移概率计算轨迹候选点集中的每个轨迹候选点的得分”步骤,具体包括以下步骤:
19、设有m个采样点,第m个采样点有nm个轨迹候选点,第m-1个采样点有nm-1个轨迹候选点;其中,第m个采样点为当前采样点,1≤m≤m;
20、第m个采样点的第n个轨迹候选点的观测概率为pnobs;第m-1个采样点的第j个轨迹候选点到当前采样点的第n个轨迹候选点的转移概率为pjntran;其中,1≤n≤nm,1≤j≤nm-1;
21、对于第m个采样点的第n个轨迹候选点,计算第m-1个采样点的所有nm-1个轨迹候选点到第n个轨迹候选点的转移概率,得到p1ntran,p2ntran,…,pjntran,…共nm-1个转移概率值;第m-1个采样点的轨迹候选点得分分别为t1,t2,…,tj,…共nm-1个得分值;则根据以下公式计算当前采样点的第n个轨迹候选点的得分:
22、sn=max([pnobs*p1ntran+t1,pnobs*p2ntran+t2,…,pnobs*pjntran+tj,…]);
23、并记录nm-1个轨迹候选点中的其中一个轨迹候选点使[pnobs*p1ntran+t1,pnobs*p2ntran+t2,…,pnobs*pjntran+tj,…]的值最大;则对于当前采样点,得到s1,s2,…,sn,…共nm个得分值,以及所述得分值对应的第m-1个采样点的轨迹候选点;
24、当m=1时,由于不存在上一个采样点,得分初始化为各个轨迹候选点的观测概率值;
25、若第m-1个采样点的第j个候选点与第m个采样点的第n个候选点之间不存在路径,则转移概率设为负无穷,pjntran=-inf;当计算完最后一个采样点的所有轨迹候选点的nm个得分值后,通过这些得分中的最大值,往前回溯得到得分最大的轨迹候选点序列作为对应的目标候选点集。
26、根据第一方面的第四种可能的实现方式中,在第一方面的第五种可能的实现方式中,所述观测概率表示当前采样点的真值为当前轨迹候选点的概率,以当前轨迹候选点与对应的当前采样点之间的距离d表达观测概率;设距离d服从正态分布,则根据正态分布概率密度函数计算观测概率d的公式为:d~n(μ,σ2),其中,μ为均值,σ为标准差;
27、所述转移概率为当前轨迹候选点与上一个采样点对应的其中一个轨迹候选点之间的最短路径距离、与两个轨迹候选点对应的两个采样点之间的距离的比值或比值的倒数。
28、根据第一方面的第四种可能的实现方式中,在第一方面的第六种可能的实现方式中,所述“当前轨迹候选点与上一个采样点对应的其中一个轨迹候选点之间的最短路径距离”步骤,具体包括以下步骤:
29、若两轨迹候选点关联的道路向量相同,则根据在此道路向量上的投影距离计算最短路径;
30、若两轨迹候选点关联的道路向量存在接续关系,则根据道路拓扑和车道拓扑计算最短路径;
31、若当前轨迹候选点与上一个采样点对应的其中一个轨迹候选点之间不存在路径,则最短路径为负无穷-inf。
32、根据第一方面的第一种可能的实现方式,在第一方面的第七种可能的实现方式中,所述“比对所述所述目标车道向量与所述母库关联车道向量,根据比对结果匹配搜索到的限速牌与轨迹数据中的限速牌,并根据匹配结果更新母库高精地图数据的限速牌”步骤,具体包括以下步骤:
33、当检测到所述目标车道向量与所述母库关联车道向量重叠、且搜索到的限速牌限速值与轨迹数据中的限速牌限速值相同时,则判断搜索到的限速牌与轨迹数据中的限速牌匹配上,母库高精地图数据中未有限速牌更新;
34、当检测到所述目标车道向量与所述母库关联车道向量重叠、且搜索到的限速牌限速值与轨迹数据中的限速牌位置匹配但限速值不匹配时,则将轨迹数据中的限速牌限速值作为母库高精地图数据对应搜索到的限速牌的新限速值;
35、当检测到所述目标车道向量在所述母库中无法找到位置匹配的限速牌时,则判断为限速牌新增,将轨迹数据中的限速牌新增至母库高精地图数据中。
36、第二方面,提供了一种高精度地图限速标志牌更新系统,包括:
37、获取模块,用于获取待测道路的母库高精地图数据,及采集车对待测道路进行数据采集的多个轨迹数据,所述轨迹数据包括行驶轨迹及限速牌;
38、查询模块,与所述获取模块通信连接,用于对多条行驶轨迹中观测到限速牌的所有轨迹点进行聚类,得到聚类中心,并在所述母库高精地图数据中查询所述聚类中心的预设限速牌搜索半径内是否存在限速牌;
39、不存在模块,与所述查询模块通信连接,用于若不存在,则将轨迹数据中的限速牌作为母库高精地图数据的新增限速牌;以及,
40、存在模块,与所述查询模块通信连接,用于若存在,则匹配搜索到的限速牌与轨迹数据中的限速牌,并根据匹配结果更新母库高精地图数据的限速牌。
41、第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上述所述的高精度地图限速标志牌更新方法。
42、与现有技术相比,本发明的优点如下:相比于依靠测绘采集和人工制作的高精度地图更新,利用采集车对待测道路进行数据采集的多个轨迹数据进行高精地图限速牌更新,有利于减少人工抽检成本,提高高精度地图制作匹配效率。
- 还没有人留言评论。精彩留言会获得点赞!