一种机器人人脸识别装置的制作方法
本技术涉及人脸识别,特别涉及一种机器人人脸识别装置。
背景技术:
1、随着移动互联网、云计算、大数据、人工智能等计算机科学技术的进步,人脸识别行业应用场景更加广阔。越来越多的人脸识别设备,进入到各行各业,比如说安防、车站、企业考勤、银行等等。
2、但现有的人脸识别装置依然存在以下不足:1、市面上的人脸识别设备大同小异,将人脸识别设备固定安装不动,摄像头识别范围有限,只能识别站在摄像头辐射范围位内才有可能被识别,倘如偏移一点位置,可能就会出现检测不出得情况,局限性大;2、现有的人脸识别设备在晚上进行人脸识别时因光线太差会出现显示误差,只能靠显示面板那一点灯光进行补光,导致使用效果不佳。故此,我们提出了一种机器人人脸识别装置。
技术实现思路
1、本实用新型的主要目的在于提供一种机器人人脸识别装置,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
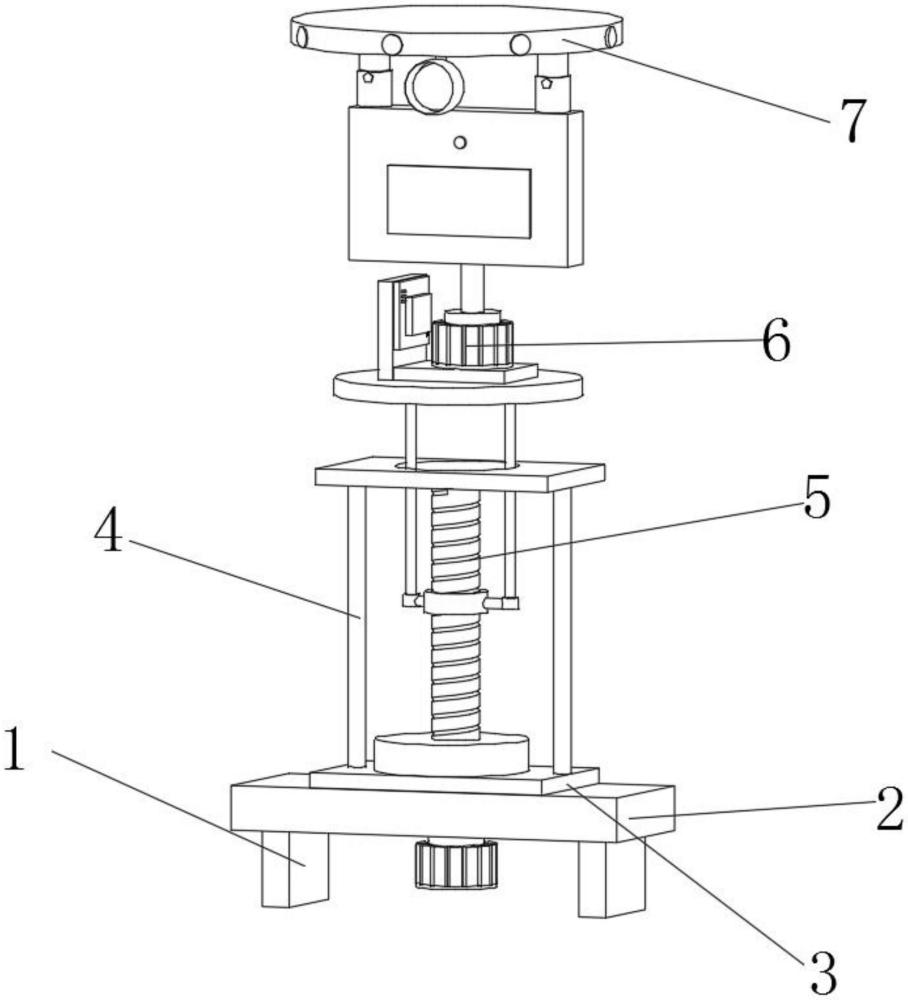
3、一种机器人人脸识别装置,包括底脚,其特征在于:所述底脚设置有两个,两个所述底脚上端共同固定连接有底板,所述底板上端固定连接有连接板,所述连接板上端左部和上端右部均固定连接有固定柱,所述底板下端中部穿插连接有升降结构,所述升降结构上端固定连接有控制结构,所述控制结构上端固定连接有补光结构。
4、优选的,所述升降结构包括一号电机和凿空盘,所述一号电机的输出端固定连接有活动块,所述活动块上端固定连接有螺旋杆,所述螺旋杆外表面螺纹连接有一号套索,所述一号套索外表面固定连接有两个二号套索,两个所述二号套索上端均固定连接有连接柱,两个所述连接柱上端共同固定连接有连接块,所述一号电机的上端与底板的下端固定连接,所述一号电机的输出端贯穿底板的下端并延伸至连接板的上端。
5、优选的,所述凿空盘的下端与固定柱的上端固定连接,两个所述连接柱均位于凿空盘内且均与凿空盘的内壁面存在空隙。
6、优选的,所述补光结构包括补光连接具,所述补光连接具下端固定连接有连接球,所述连接球外表面固定连接有补光灯,所述补光连接具下端左部和下端右部均固定连接有伸缩杆,两个所述伸缩杆外表面均螺纹连接有限位杆。
7、优选的,所述控制结构包括l型连接板,所述l型连接板右端上部固定安装有控制器,所述l型连接板上端固定安装有二号电机,所述二号电机的输出端固定连接有显示面板,所述显示面板前端中部设置有显示屏,所述显示面板前端上部固定安装有摄像头,所述l型连接板的下端与连接块的上端固定连接。
8、优选的,所述补光连接具外表面固定安装有若干个红外感应器,两个所述伸缩杆的下端均与显示面板的上端固定连接。
9、与现有技术相比,本实用新型具有如下有益效果:
10、1、本实用新型中,通过设置控制结构,利用补光连接具外的红外感应器,红外感应器第一次检测热源,锁定人所在位置,引导控制器发送指令让二号旋转电机转动,使显示面板旋转到达热源的位置,再通过红外感应器进行第二次感应,检测热源的上下精确位置,引导一号电机旋转,带动螺纹杆旋转,通过螺纹杆外表面的套索进行螺纹运动,从而实现二号套索进行升降,精确导向,准确,稳定。
11、2、本实用新型中,通过设置补光结构,通过所设置的伸缩杆可调节高低,确认不会因身高不同而导致不适用情况,可通过调节限位杆将对应的伸缩杆进行固定限位,使得补光灯可以直接照在面部对其进行补光,从而提高人脸识别的清晰度。
技术特征:
1.一种机器人人脸识别装置,包括底脚(1),其特征在于:所述底脚(1)设置有两个,两个所述底脚(1)上端共同固定连接有底板(2),所述底板(2)上端固定连接有连接板(3),所述连接板(3)上端左部和上端右部均固定连接有固定柱(4),所述底板(2)下端中部穿插连接有升降结构(5),所述升降结构(5)上端固定连接有控制结构(6),所述控制结构(6)上端固定连接有补光结构(7);
2.根据权利要求1所述的一种机器人人脸识别装置,其特征在于:所述凿空盘(57)的下端与固定柱(4)的上端固定连接,两个所述连接柱(56)均位于凿空盘(57)内且均与凿空盘(57)的内壁面存在空隙。
3.根据权利要求1所述的一种机器人人脸识别装置,其特征在于:所述补光结构(7)包括补光连接具(71),所述补光连接具(71)下端固定连接有连接球(72),所述连接球(72)外表面固定连接有补光灯(73),所述补光连接具(71)下端左部和下端右部均固定连接有伸缩杆(74),两个所述伸缩杆(74)外表面均螺纹连接有限位杆(75)。
4.根据权利要求3所述的一种机器人人脸识别装置,其特征在于:所述控制结构(6)包括l型连接板(61),所述l型连接板(61)右端上部固定安装有控制器(62),所述l型连接板(61)上端固定安装有二号电机(63),所述二号电机(63)的输出端固定连接有显示面板(64),所述显示面板(64)前端中部设置有显示屏(65),所述显示面板(64)前端上部固定安装有摄像头(66),所述l型连接板(61)的下端与连接块(58)的上端固定连接。
5.根据权利要求3所述的一种机器人人脸识别装置,其特征在于:所述补光连接具(71)外表面固定安装有若干个红外感应器(67),两个所述伸缩杆(74)的下端均与显示面板(64)的上端固定连接。
技术总结
本技术涉及人脸识别技术领域,尤其为一种机器人人脸识别装置,包括底脚,其特征在于:所述底脚设置有两个,两个所述底脚上端共同固定连接有底板,所述底板上端固定连接有连接板,所述连接板上端左部和上端右部均固定连接有固定柱,所述底板下端中部穿插连接有升降结构,所述升降结构上端固定连接有控制结构,所述控制结构上端固定连接有补光结构。本技术所述的一种机器人人脸识别装置,通过设置控制结构,用补光连接具外的红外感应器,红外感应器第一次检测热源,锁定人所在位置,引导控制器发送指令让二号旋转电机转动,使显示面板旋转到达热源的位置,再通过红外感应器进行第二次感应,检测热源的上下精确位置。
技术研发人员:李花林,孙大勇,刘朝晖,李娜,晁悦
受保护的技术使用者:深圳市第二人民医院(深圳市转化医学研究院)
技术研发日:20230913
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!